рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Механика
- /
- Основы релятивистской механики
Реферат Курсовая Конспект
Основы релятивистской механики
Основы релятивистской механики - раздел Механика, Федеральное агенТство по образованию 1. Принцип Относительности Галилея (В Классической Механике) Утверждает: ...
1. Принцип относительности Галилея (в классической механике) утверждает:
а) «Никакие опыты, проводимые в любых системах отсчета с механическими приборами, не позволяют установить, покоится система отсчета или движется равномерно и прямолинейно по отношению к другой отсчета»;
б) «Никакие опыты, проводимые в инерциальных системах отсчета с механическими приборами, не позволяют установить, покоится система отсчета или движется равномерно и прямолинейно по отношению к другой произвольной системе отсчета»;
в) «Никакие опыты, проводимые в инерциальных системах отсчета с механическими приборами, не позволяют установить, покоится система отсчета или движется равномерно и прямолинейно по отношению к другой инерциальной системе отсчета».
Примечание. Предполагается, что время не зависит от относительного движения систем отсчета.
2. Преобразования Галилея определяют положение произвольной материальной точки в двух инерциальных системах отсчета, одна из которых движется со скоростью  относительно другой при условии:
относительно другой при условии:
а) если направление скорости не совпадает с направлением радиус-вектора  , определяющим положение начала координат подвижной системы отсчёта К' в неподвижной системе координат К;
, определяющим положение начала координат подвижной системы отсчёта К' в неподвижной системе координат К;
б) если направление скорости совпадает с направлением радиус-вектора , определяющим положение начала координат подвижной системы отсчёта К' в неподвижной системе координат К;
в) если направление скорости совпадает с направлением радиус-вектора , определяющим положение начала координат подвижной системы отсчёта К'.
3. В векторной форме преобразования Галилея можно представить так:
а)  , где
, где  и
и  – радиус-векторы, определяющие положение материальной точки в неподвижной и подвижной инерциальных системах отсчета в данный момент времени; – радиус-вектор, определяющий положение начала подвижной системы координат К' в неподвижной системе координат К;
– радиус-векторы, определяющие положение материальной точки в неподвижной и подвижной инерциальных системах отсчета в данный момент времени; – радиус-вектор, определяющий положение начала подвижной системы координат К' в неподвижной системе координат К;
б)  , где и – радиус-векторы, определяющие положение материальной точки в неподвижной и подвижной инерциальных системах отсчета в данный момент времени; – скорость движения подвижной системы координат;
, где и – радиус-векторы, определяющие положение материальной точки в неподвижной и подвижной инерциальных системах отсчета в данный момент времени; – скорость движения подвижной системы координат;
в)  , где и – радиус-векторы, определяющие положение материальной точки в неподвижной и подвижной инерциальных системах отсчета в данный момент времени; – скорость движения подвижной системы координат.
, где и – радиус-векторы, определяющие положение материальной точки в неподвижной и подвижной инерциальных системах отсчета в данный момент времени; – скорость движения подвижной системы координат.
4. Используя преобразования Галилея в проекциях на оси координат в произвольный момент времени t, координату x выбранной точки в неподвижной системе отсчета К можно определить так:
а)  ;
;
б)  ;
;
в)  .
.
5. Используя преобразования Галилея в проекциях на оси координат в произвольный момент времени t, координату y выбранной точки в неподвижной системе отсчета К можно определить так:
а)  ;
;
б)  ;
;
в)  .
.
6. Используя преобразования Галилея в проекциях на оси координат в произвольный момент времени t, координату z выбранной точки в неподвижной системе отсчета К можно определить так:
а)  ;
;
б)  ;
;
в)  .
.
7. Преобразования Галилея справедливы в том случае, когда время в подвижной инерциальной системе отсчёта и неподвижной инерциальной системе отсчёта:
а)  ;
;
б)  ;
;
в)  .
.
8. Используя преобразования Галилея в проекциях на оси координат в произвольный момент времени t, координату x' выбранной точки в подвижной системе отсчета К' можно определить так:
а)  ;
;
б)  ;
;
в)  .
.
9. Используя преобразования Галилея в проекциях на оси координат в произвольный момент времени t, координату y' выбранной точки в подвижной системе отсчета К' можно определить так:
а)  ;
;
б) ;
в)  .
.
10. Используя преобразования Галилея в проекциях на оси координат в произвольный момент времени t, координату z' выбранной точки в подвижной системе отсчета К' можно определить так:
а) ;
б)  ;
;
в)  .
.
11. Ковариантные, или инвариантные, уравнения – это уравнения, обе части которых при переходе от одной системы координат к другой преобразуются:
а) одинаково и сохраняют свой вид во всех инерциальных системах отсчета;
б) неодинаково и несохраняют свой вид во всех инерциальных системах отсчета;
в) одинаково, но несохраняют свой вид во всех инерциальных системах отсчета.
12. Закон сложения скоростей в классической механике отображается соотношением:
а)  ;
;
б)  ;
;
в) .
13. Теория относительности – это физическая теория, рассматривающая пространственно-временные закономерности, справедливые:
а) только для механических процессов;
б) только для оптических процессов;
в) для любых физических процессов.
14. Инвариантность (симметрия) законов физики – это неизменность законов физики, устанавливающих соотношение между величинами, характеризующими физическую систему или определяющими изменение этих величин:
а) в пространстве при преобразованиях;
б) со временем при преобразованиях;
в) в пространстве и со временем при преобразованиях.
15. Относительное расстояние между выбранными точками пространства в подвижных системах отсчета определяется соотношением:
а)  ;
;
б)  ;
;
в)  .
.
16. Относительное расстояние между выбранными точками пространства в неподвижных системах отсчета определяется соотношением:
а) ;
б) ;
в) .
17. Инварианты преобразований – это инвариантные величины:
а) расстояния между телами (точками);
б) промежутки времени между событиями;
в) относительные скорости и ускорения тел.
18. Первый постулат специальной теории относительности (принцип относительности) утверждает:
а) «Механические и тепловые физические опыты, производимые внутри инерциальной системы отсчета, позволяют установить, находится ли она в равномерном абсолютном и прямолинейном движении или нет»;
б) «Никакие электромагнитные и оптические опыты, производимые внутри инерциальной системы отсчета, не позволяют установить, находится ли она в равномерном абсолютном и прямолинейном движении или нет»;
в) «Никакие физические опыты (механические, оптические, тепловые, электромагнитные и т.д.), производимые внутри инерциальной системы отсчета, не позволяют установить, находится ли она в равномерном абсолютном и прямолинейном движении или нет».
19. Второй постулат специальной теории относительности утверждает:
а) «Скорость света в вакууме одинакова во всех направлениях и не зависит от движения источника света»;
б) «Скорость света в вакууме одинакова во всех направлениях и зависит от движения источника света»;
в) «Скорость света в вакууме не зависит от движения источника света».
20. Третий постулат специальной теории относительности утверждает:
а) «События, одновременные в одной системе отсчета, являются одновременными в другой системе отсчета»;
б) «События, одновременные в одной системе отсчета, не являются одновременными в другой системе отсчета»;
в) «Одновременность событий является понятием относительным».
21. Формула преобразования координаты x в неподвижной системе координат, согласно преобразованиям Лоренца, имеет вид:
а) ;
б)  ;
;
в)  .
.
22. Формула преобразования координаты x' в подвижной системе координат, согласно преобразованиям Лоренца, имеет вид:
а) ;
б) ;
в) .
23. Формула преобразования времени в неподвижной системе координат, согласно преобразованиям Лоренца, имеет вид:
а)  ;
;
б)  ;
;
в) 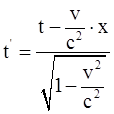 .
.
24. Формула преобразования времени в подвижной системе координат, согласно преобразованиям Лоренца, имеет вид:
а) ;
б) ;
в) .
25. Если частица движется в неподвижной системе отсчёта вдоль оси x со скоростью v, то в момент времени t в подвижной системе отсчёта, движущейся относительно неподвижной со скоростью u, скорость частицы v', согласно преобразованиям Лоренца, определяется соотношением:
а)  ;
;
б)  ;
;
в)  .
.
26. Часы, находящиеся в неподвижной системе отсчёта К в точке х = 0, показывают время t. В подвижной системе отсчёта К' часы, пространственно совпадающие с часами в неподвижной системе отсчёта К в этот момент времени, показывают время:
а) 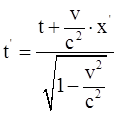 ;
;
б) ;
в) .
27. Соотношение, отображающее показания часами, находящимися в неподвижной системе отсчёта К в точке х = 0, и часами, находящимися в подвижной системе отсчёта К', пространственно совпадающими с часами в неподвижной системе отсчёта К, имеет вид:
а) 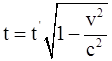 ;
;
б) ;
в) 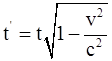 .
.
28. Длина стержня в подвижной инерциальной системе отсчёта (в направлении её скорости движения v) отображается соотношением:
а)  ;
;
б)  ;
;
в)  .
.
29. Размеры всех тел, покоящихся в неподвижной инерциальной системе отсчёта, при измерении в подвижной инерциальной системе отсчёта (в направлении её скорости движения v) оказываются:
а) равными ;
б) меньше в  ;
;
в) больше в .
30. Продольный диаметр сферы, движущейся со скоростью v относительно неподвижной инерциальной системы отсчёта, при измерении в подвижной инерциальной системе отсчёта будет:
а) равен поперечному диаметру;
б) больше в раз поперечного диаметра;
в) меньше в раз поперечного диаметра.
31. Космический корабль с двумя космонавтами летит со скоростью v = 0,8c (с – скорость распространения света в вакууме). Один из космонавтов медленно поворачивает метровый стержень из положения 1, параллельного направлению движения, в положение 2, перпендикулярное этому направлению. Тогда длина стержня с точки зрения другого космонавта:
а) изменится от 1,0 м в положении 1 до 1,67 м в положении 2;
б) равна 1,0 м при любой его ориентации;
в) изменится от 1,0 м в положении 1 до 0,6 м в положении 2;
г) изменится от 0,6 м в положении 1 до 1,0 м в положении 2.
32. Импульс (вектор энергии – импульса) материальной точки в специальной теории относительности определяется соотношением:
а)  ;
;
б)  ;
;
в)  .
.
33. Уравнение движения материальной точки в специальной теории относительности можно записать так:
а)  ;
;
б)  ;
;
в)  .
.
34. Кинетическая энергия тела в специальной теории относительности определяется соотношением:
а)  ;
;
б)  ;
;
в)  .
.
35. Между массой всякого физического объекта и присущей ему (во взаимосвязи с окружающей средой) полной энергией E имеет место соотношение:
а)  ;
;
б)  ;
;
в)  .
.
36. Всякое изменение энергии тела на величину DЕ влечет за собой изменение массы тела на Dm, причем:
а)  ;
;
б)  ;
;
в)  .
.
37. Закон взаимной связи энергии и массы утверждает: «Всякая материя (вещество в обычном смысле или излучение), обладающая энергией Е, обладает тем самым и массой m, равной:
а)  »;
»;
б)  »;
»;
в)  ».
».
– Конец работы –
Эта тема принадлежит разделу:
Федеральное агенТство по образованию
Государственное образовательное учреждение... высшего профессионального образования... Курский государственный технический университет...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Основы релятивистской механики
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.029 сек.
Новости и инфо для студентов