рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Транспорт
- /
- Теоретическая механика
Реферат Курсовая Конспект
Теоретическая механика
Теоретическая механика - раздел Транспорт, Ульяновское высшее авиационное училище Статика Тема 1. Основные Понятия И Аксиомы Статики ...
Статика
Тема 1. Основные понятия и аксиомы статики
Материальная точка– тело, размерами которого можно пренебречь. Она обладает массой и способностью взаимодействовать с другими материальными точками. Например, в небесной механике планеты, движущиеся вокруг Солнца, часто рассматривают как материальные точки, поскольку их размеры малы по сравнению с размерами орбит. Пользоваться понятием материальной точки целесообразно также и в том случае, когда все частицы движущегося физического тела перемещаются одинаково.
Совокупность материальных точек, положения и движения которых взаимосвязаны между собой, называется системой материальных точек.
В теоретической механике пренебрегают малыми деформациями тел и считают эти тела абсолютно твердыми.
Силой называется количественная мера механического взаимодействия тел. Сила является векторной величиной, действие силы на тело определяется численным значением (модулем), направлением и точкой приложения силы (рис. 3.1.1).

Рис. 3.1.1
На схемах сила изображается направленным отрезком. Основной единицей измерения силы является 1 Ньютон (1 Н).
Совокупность нескольких сил, действующих на тело, называется системой сил.
Эквивалентная система сил – система сил, оказывающих одинаковое механическое действие на одно и то же тело.
Уравновешенная система сил– система сил, под действием которых тело находится в равновесии.
Сила, эквивалентная некоторой системе сил, называется равнодействующей.
Сила, равная по модулю равнодействующей и направленная по линии ее действия в противоположную сторону, называется уравновешивающей силой.
Внешними силами называются силы, действующие на тело со стороны других тел.
Внутренние силы– силы взаимодействия между частицами одного и того же тела.
В статике рассматриваются условия равновесия внешних сил.
Аксиомы статики. В основе статики лежат несколько не требующих доказательства аксиом, из которых выводятся все теоремы и уравнения.
Аксиома 1.Две силы, действующие на абсолютно твердое тело, уравновешиваются только тогда, когда они равны по величине и направлены по одной прямой в противоположные стороны (рис. 3.1.2).
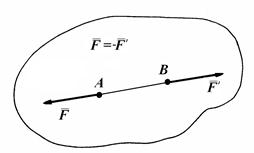
Рис. 3.1.2
Аксиома 2. Действие данной системы сил на абсолютно твердое тело не изменится, если прибавить к ней или отнять от нее уравновешенную систему сил ( ) ≡(
) ≡( ), т.к. (
), т.к. ( ) ≡ 0 (рис. 3.1.3).
) ≡ 0 (рис. 3.1.3).
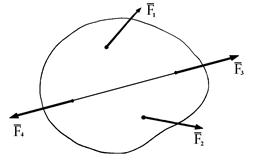
Рис. 3.1.3
Следствие из аксиомы 1 и 2. Действие силы на абсолютно твердое тело (АТТ) не изменится, если точку приложения этой силы перенести по линии ее действия. Пусть на тело в точке А действует сила  (рис. 3.1.4). Добавим в точке В, выбранной произвольно на линии действия силы , уравновешенную систему сил
(рис. 3.1.4). Добавим в точке В, выбранной произвольно на линии действия силы , уравновешенную систему сил  и
и  равных по абсолютной величине и направленных по линии ее действия. На основании аксиомы 1 силы и будут уравновешены и их можно отбросить (аксиома 2). В результате получим силу
равных по абсолютной величине и направленных по линии ее действия. На основании аксиомы 1 силы и будут уравновешены и их можно отбросить (аксиома 2). В результате получим силу  , но приложенную не в точке А, а в точке В. Отсюда следует, что сила, приложенная к АТТ, есть вектор скользящий.
, но приложенную не в точке А, а в точке В. Отсюда следует, что сила, приложенная к АТТ, есть вектор скользящий.
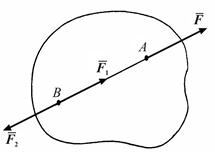
Рис. 3.1.4
Аксиома 3. Равнодействующая двух сил, приложенных к АТТ в одной точке, равна их геометрической сумме  , т.е. выражается по модулю и направлению диагональю параллелограмма, построенного на этих силах (рис. 3.1.5):
, т.е. выражается по модулю и направлению диагональю параллелограмма, построенного на этих силах (рис. 3.1.5):
 . (3.1.1)
. (3.1.1)
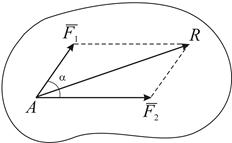
Рис. 3.1.5
Аксиома 4. Всякому действию одного тела на другое соответствует равное по величине, но противоположное по направлению противодействие. Действие и противодействие – это силы, приложенные к двум различным телам, поэтому они не уравновешиваются (рис. 3.1.6).
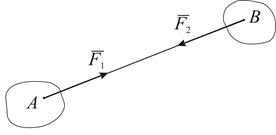
Рис. 3.1.6
 Аксиома 5. Если деформируемое тело под действием системы сил находится в равновесии, то при отвердевании его равновесие сохраняется.
Аксиома 5. Если деформируемое тело под действием системы сил находится в равновесии, то при отвердевании его равновесие сохраняется.
Под действием сил тело D находится в равновесии. Если трос CB заменить стержнем, то равновесие не нарушится, равновесие не нарушится и в том случае, если трос BD заменить стержнем, если же стержень АВ заменить тросом – равновесие нарушится (рис. 3.1.7).
Связи и их реакции.Твердое тело называется свободным, если оно может перемещаться в пространстве в любом направлении (ВС в полете). Тело, ограничивающее свободу движения данного твердого тела, является по отношению к нему связью. Твердое тело, свобода движения которого ограничена связями, называется несвободным (самолет на ВПП).
Сила, с которой связь действует на тело, препятствуя его перемещению в том или ином направлении, называется силой реакцииэтой связи.
Для нахождения реакции связей используют аксиому связей, на основании которой всякое несвободное тело можно рассматривать как свободное, если отбросить связи, заменив их действие на тело силами реакций этих связей.
Направление силы реакции связи противоположно тому направлению, в котором активные силы стремятся переместить тело.
Различают три группы связей:
1. Гибкие связи (трос, цепь, ремень, канат): реакции связей направлены по оси связей (рис. 3.1.8).
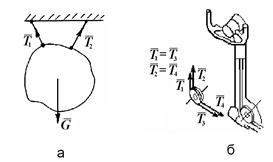
Рис. 3.1.8
Если нить отклоняется роликом, в котором не учитывается трение, то натяжение нити не изменяется. Например, натяжение тросов, идущих от штурвала к элеронам ВС, с обеих сторон равны по модулю |Т1| = |Т3|, |Т2 |= |Т4| (рис. 3.1.8, б).
 |
2. Твердые, идеально гладкие связи: реакция направлена по общей нормали к поверхностям соприкасающихся тел (рис. 3.1.9).
3. Шарнирные связи. Шарниром в механике называется устройство, допускающее поворот одного тела относительно другого, но ограничивающее при этом линейные перемещения этих тел. Шарнирами, например, являются соединения А, В, С элементов задней опоры самолета (рис. 3.1.10), узлы А, В, С, D подвески авиационного двигателя (рис. 3.1.11).
Реакция цилиндрического шарнира  может иметь любое направление в плоскости, перпендикулярной оси шарнира. Направление реакции зависит от величины и направления действующих на тело сил. Реакция подвижного шарнира всегда направлена по нормали к опорной поверхности шарнира (рис. 3.1.12, б, в).
может иметь любое направление в плоскости, перпендикулярной оси шарнира. Направление реакции зависит от величины и направления действующих на тело сил. Реакция подвижного шарнира всегда направлена по нормали к опорной поверхности шарнира (рис. 3.1.12, б, в).
Рис. 3.1.12
Шаровой шарнир исключает любое перемещение тела во всех направлениях, кроме вращения, поэтому реакция шарового шарнира может иметь любое направление в пространстве. Чаще всего эту реакцию представляют в виде трех ее составляющих по осям координат x, y, z (рис. 3.1.13).
 |
Разнообразные опорные устройства валов машин схематически представляют подшипниками двух типов: радиальным (цилиндрическим – А), не препятствующим некоторым осевым смещениям вала, и радиально-упорным (В), исключающим осевые перемещения вала (рис. 3.1.14).
 Неподвижная защемляющая опора или жесткая заделка. На заделанный конец балки со стороны опоры действует система распределенных сил, которую заменяем эквивалентной системой сосредоточенных сил
Неподвижная защемляющая опора или жесткая заделка. На заделанный конец балки со стороны опоры действует система распределенных сил, которую заменяем эквивалентной системой сосредоточенных сил  и моментом МА, приложенных в точке А (рис. 3.1.15).
и моментом МА, приложенных в точке А (рис. 3.1.15).
Тема 2. Система сходящихся сил
– Конец работы –
Эта тема принадлежит разделу:
Ульяновское высшее авиационное училище
Федеральное государственное образовательное учреждение... Высшего профессионального образования... Ульяновское высшее авиационное училище...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Теоретическая механика
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.022 сек.
Новости и инфо для студентов