рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Менеджмент
- /
- Задачи и методы синтеза САУ
Реферат Курсовая Конспект
Задачи и методы синтеза САУ
Задачи и методы синтеза САУ - раздел Менеджмент, Задачи и методы синтеза САУ 3.1 Задачи Синтеза Сау Основную Задачу Синтеза Сау С...
3.1 Задачи синтеза САУ
Основную задачу синтеза САУ составляет определение структуры и параметров системы на основе требований к качеству процесса управления. САУ, наилучшим образом удовлетворяющую этим требованиям, называют оптимальной.
Как правило, оптимальный процесс регулирования должен удовлетворять следующим требованиям:
1) максимальное отклонение должно стремиться к минимуму ymax ® min;
2) динамическое отклонение  ;
;
3) время регулирования  ;
;
4) степень колебательности m ® min (n ® min) и другие.
Основными этапами синтеза САУ считают:
1) анализ свойств ОУ и создание ММ ОУ (идентификация объекта);
2) выбор структурной схемы САУ и соответственно принципа регулирования (см. п. 1.2);
3) выбор УУ, включая выбор характера действия АР и закона регулирования;
4) выбор оптимальных параметров настройки (ОПН) АР;
5) оценку устойчивости, запаса устойчивости и качества синтезируемой САУ;
6) синтез корректирующих устройств.
3.2 Типовые свойства объектов управления
Объектом автоматического управления (регулирования) называют машину, технологический агрегат или группу агрегатов, требуемый режим работы которых должен поддерживаться АР (рисунки 1.12 и 2.14). Изучение ОР и его свойств на практике составляет важную часть анализа и предшествует синтезу САУ. Таким образом, целью анализа ОР является определение его типовых свойств, которые принято описывать статическими и динамическими характеристиками.
 Под статической характеристикой понимают зависимость регулируемой величины y от регулирующего воздействия yрв различных установившихся режимах
Под статической характеристикой понимают зависимость регулируемой величины y от регулирующего воздействия yрв различных установившихся режимах
y = f(yр).
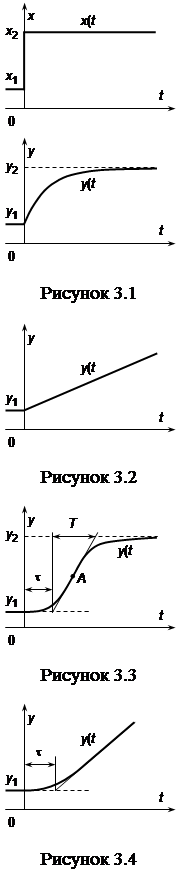
Динамическая характеристика ОР y(t) показывает, как изменяется во времени регулируемая величина в результате приложения к ОР воздействия. Принято изучать ОР при ступенчатом воздействии. В этом случае свойства ОР описывает переходная характеристика h(t), которую принято называть характеристикой разгона ОР (разгонной характеристикой).
ОР различной физической природы, конструкции и принципа действия имеют ряд общих свойств (типовых):
- емкость;
- самовыравнивание;
- запаздывание.
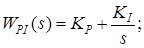
Под емкостью ОР понимают его способность накапливать вещество или энергию. При регулировании угловой скорости электрического двигателя эту способность выражает момент инерции ротора, в тепловых процессах – теплоемкость, и т.д. ОР подразделяют на одно-, двух- и многоемкостные. Динамические свойства одноемкостного ОР описывают ОДУ первого порядка (см. таблицу 2.1), следовательно, кривая разгона такого ОР имеет вид простой экспоненты (рисунок 3.1). Двухемкостный ОР рассматривают как сложный объект, состоящий из двух последовательно соединенных одноемкостных ОР. ММ такого ОР служит А‑звено второго порядка (см. таблицу 2.1). Кривая разгона двухемкостного ОР показана на рисунке 3.3.
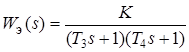
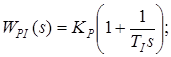
Свойство ОР приходить после возмущения в новое установившееся состояние без участия АР называют самовыравниванием (саморегулированием). ОР, обладающие самовыравниванием, называют статическими (устойчивыми). ОР, возмущение которых вызывает неограниченное непрерывное изменение регулируемой величины с постоянной скоростью, пропорциональной возмущению, называют астатическими (неустойчивыми). Разгонные характеристики, показанные на рисунках 3.1 и 3.3, принадлежат ОР с самовыравниванием (статическим). На рисунках 3.2. и 3.4 изображены кривые разгона ОР без самовыравнивания (астатических ОР).
Разгонные характеристики одноемкостных статического и астатического ОР практически не отличаются от переходных характеристик А-звена первого порядка и идеального И-звена соответственно. Поэтому эти звенья принимают в качестве ММ одноемкостного статического и астатического ОР соответственно
 , (3.1)
, (3.1)
 (3.2)
(3.2)
Практически момент изменения регулируемой величины y(t) не совпадает с моментом приложения к ОР управляющего воздействия (t = 0). Изменение регулируемой величины начинается через некоторое время t, которое называют запаздыванием (рисунки 3.3 и 3.4).
В качестве первой ММ двухемкостных статического и астатического ОР принимают последовательное соединение запаздывающего звена и соответственно А-звена первого порядка или И-звена с эквивалентной ПФ
 (3.3)
(3.3)
 (3.4)
(3.4)
В качестве второй ММ принимают последовательное соединение двух А-звеньев первого порядка с эквивалентной ПФ
 (3.5)
(3.5)
или соединение А-звена первого порядка и И-звена
 . (3.6)
. (3.6)
Таким образом, выбор из названных ММ наилучшей составляет, как правило, задачу идентификации промышленного ОР. Выбранную ММ принято называть эквивалентным ОР.
3.3 Типовые законы регулирования (алгоритмы управления)
Под законом регулирования (управления) понимают алгоритм или функциональную зависимость, в соответствии с которой АР (рисунок 1.1) формирует регулирующее воздействие yр(t). Общий вид этой зависимости
yр(t) = F1(e) + F2(g) + F3(z),
где F1(e), F2(g) и F3(z) – функции от ошибки e(t), задающего воздействия g(t) и возмущения z(t), а также от их производных и интегралов по времени.
Различают линейные и нелинейные законы регулирования. Линейная форма
 , (3.7)
, (3.7)
или

где  – коэффициенты, называемые параметрами настройки АР.
– коэффициенты, называемые параметрами настройки АР.
Если уравнение (3.7) является линейным, то закон регулирования также называют линейным. Закон регулирования является непрерывным, если функция  непрерывна. В технике автоматического регулирования нашли применение пять типовых (стандартных) непрерывных линейных законов регулирования:
непрерывна. В технике автоматического регулирования нашли применение пять типовых (стандартных) непрерывных линейных законов регулирования:
– пропорциональный (П);
– интегральный (И);
– пропорционально-интегральный (ПИ);
– пропорционально-дифференциальный (ПД);
– пропорционально-интегрально-дифференциальный (ПИД).
Реализующие названные законы регулирования АР называют соответственно П-, И-, ПИ-, ПД- и ПИД-регуляторами.
 Переходные характеристики названных идеальных АР показаны соответственно на рисунках 3.5 – 3.9.
Переходные характеристики названных идеальных АР показаны соответственно на рисунках 3.5 – 3.9.
Реальные АР отличаются от идеальных инерционностью. Структурно реальный АР представляют последовательным соединением идеального АР и А-звена первого порядка.
Идеальные АР описывают следующими ПФ:
П-регулятор
WP(s) = KP; (3.8)
И-регулятор
 (3.9)
(3.9)
ПИ-регулятор
 (3.10)
(3.10)
ПД-регулятор
 (3.11)
(3.11)
ПИД-регулятор
 (3.12)
(3.12)
Передаточные функции типовых регуляторов (3.8) – (3.12) относят к параллельной форме записи, см. (2.28). Стандартной формой считают следующую:
 (3.13)
(3.13)
 (3.14)
(3.14)
 (3.15)
(3.15)
где KP – коэффициент усиления (передачи);
TI – постоянная времени изодрома (время изодрома) или время удвоения (см. рисунок 3.7);
TD – время предварения.
Обе формы ПФ промышленных АР отражают их конструктивные особенности. Регуляторы с независимыми параметрами настройки KP, TIи TDописывают ПФ параллельной формы (2.149) – (2.151). Стандартная форма записи ПФ указывает на зависимость интегрирующей и дифференцирующей частей АР от "общего" коэффициента усиления KP.
Сравнительная характеристика типовых законов регулирования может быть получена стандартным изменением возмущающего воздействия g(t) одной и той же САР. На рисунке 3.10 изображены примерные переходные характеристики САР h1(t) – h3(t) соответственно с П-, ПИ- и ПИД-регуляторами и статическим ОР с характеристикой разгона 4. Достоинства и недостатки каждого закона регулирования предельно очевидны.
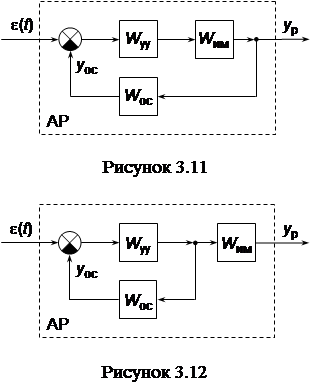
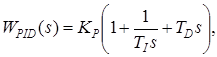
 Основными элементами аналоговых АР, с помощью которых формируют типовые законы регулирования, являются УУ, ИМ и блоки корректирующих ОС. П‑регуляторы выполняют с жесткой ОС по положению ИМ (рисунок 3.11). ПИ-регуляторы получают введением гибкой ОС (изодромной) по положению ИМ или жесткой ОС, охватывающей УУ (рисунок 3.12). ПД-регуляторы (дифференциаторы) применяют в виде блоков (приставок) предварения. ПИД-закон в технике автоматического регулирования реализуют ПИД-регуляторами или ПИ‑регуляторами в комплекте с дифференциаторами (блоками предварения).
Основными элементами аналоговых АР, с помощью которых формируют типовые законы регулирования, являются УУ, ИМ и блоки корректирующих ОС. П‑регуляторы выполняют с жесткой ОС по положению ИМ (рисунок 3.11). ПИ-регуляторы получают введением гибкой ОС (изодромной) по положению ИМ или жесткой ОС, охватывающей УУ (рисунок 3.12). ПД-регуляторы (дифференциаторы) применяют в виде блоков (приставок) предварения. ПИД-закон в технике автоматического регулирования реализуют ПИД-регуляторами или ПИ‑регуляторами в комплекте с дифференциаторами (блоками предварения).
– Конец работы –
Эта тема принадлежит разделу:
Задачи и методы синтеза САУ
Контрольные вопросы... В чем состоит задача синтеза САУ...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Задачи и методы синтеза САУ
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.019 сек.
Новости и инфо для студентов