рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Менеджмент
- /
- Метод корневого годографа
Реферат Курсовая Конспект
Метод корневого годографа
Метод корневого годографа - раздел Менеджмент, Задачи и методы синтеза САУ Метод Корневого Годографа (Мкг) Применяется При Анализе И Син...
Метод корневого годографа (МКГ) применяется при анализе и синтезе линейных САУ. С помощью корневого годографа системы можно оценить ее устойчивость и качество регулирования. Однако МКГ наиболее эффективен при синтезе корректирующих устройств САУ.
Корневым годографом называют совокупность траекторий, которые описывают корни характеристического уравнения замкнутой САУ на комплексной плоскости при изменении одного из параметров системы от 0 до ¥. Варьируемым может быть любой из параметров, линейно входящий в характеристическое уравнение. Типичной является задача исследования влияния коэффициента усиления автоматического регулятора и параметров корректирующего устройства на очертания годографа.
Суть МКГ наиболее просто оценить на примере следящей системы, структурная схема которой изображена на рисунке 2.9.
В простейшем случае ПФ разомкнутой САУ может быть подобна ПФ А-звена первого порядка
 или
или 
Единственный вещественный полюс ПФ  обозначен на комплексной плоскости (s‑плоскости) знаком "´" (рисунок 3.22). Там же изображен КГ замкнутой системы, имеющий вид прямой линии. Основная ПФ системы согласно (2.32)
обозначен на комплексной плоскости (s‑плоскости) знаком "´" (рисунок 3.22). Там же изображен КГ замкнутой системы, имеющий вид прямой линии. Основная ПФ системы согласно (2.32)
 или
или 
 Очевидно, что при K = 0 полюсы разомкнутой и замкнутой САУ равны. При увеличении коэффициента усиления K единственный полюс замкнутой САУ
Очевидно, что при K = 0 полюсы разомкнутой и замкнутой САУ равны. При увеличении коэффициента усиления K единственный полюс замкнутой САУ  будет двигаться вдоль отрицательной вещественной полуоси. Траектория движения полюса согласно определению представляет собой корневой годограф. Стрелка указывает направление возрастания параметра K. Своим началом КГ имеет полюс разомкнутой САУ.
будет двигаться вдоль отрицательной вещественной полуоси. Траектория движения полюса согласно определению представляет собой корневой годограф. Стрелка указывает направление возрастания параметра K. Своим началом КГ имеет полюс разомкнутой САУ.
В случае САУ второго порядка ПФ разомкнутой системы
 или
или 
имеет два вещественных полюса  и
и  , которые на рисунке 3.23 также обозначены знаком "´". Основная ПФ системы согласно (2.32)
, которые на рисунке 3.23 также обозначены знаком "´". Основная ПФ системы согласно (2.32)

 Также очевидно, что при K = 0 полюсы разомкнутой и замкнутой САУ равны.
Также очевидно, что при K = 0 полюсы разомкнутой и замкнутой САУ равны.
ПФ разомкнутой САУ может быть подобна ПФ колебательного звена

и соответственно иметь пару комплексно-сопряженных полюсов p1, 2 = a ± jb при x < 1. Действительную часть полюса a называют коэффициентом затухания (сравни с декрементом затухания), так как a характеризует быстроту затухания колебаний разомкнутой САУ. Мнимую часть полюса b называют частотой собственных колебаний разомкнутой САУ. Коэффициент демпфирования x и постоянная времени T разомкнутой системы определяют названные величины следующим образом:
 (3.20)
(3.20)

Корневой годограф замкнутой системы показан на рисунке 3.24.
В качестве последнего примера на рисунке 3.25 изображен корневой годограф САУ, которая в разомкнутом состоянии имеет ПФ третьего порядка соответственно структурной схеме (рисунок 3.26):

 Полюсы разомкнутой САУ p1 = 0, p2 = -10 и p3 = -20 обозначены на комплексной плоскости знаком "´".
Полюсы разомкнутой САУ p1 = 0, p2 = -10 и p3 = -20 обозначены на комплексной плоскости знаком "´".
Рассмотренные примеры достаточно иллюстрируют свойства КГ замкнутых САУ /51, 56/:
1) количество ветвей КГ равно порядку характеристического уравнения САУ D(s) = 0, т.е. количеству полюсов основной ПФ системы F(s);
2) ветви КГ начинаются при K = 0 в полюсах ПФ разомкнутой САУ p1, p2, …, pn;
 |
3) при K ® ¥ m ветвей КГ стремятся к m нулям ПФ z1, z2, …, zm. Остальные n – m ветвей устремляются в бесконечность;
4) КГ являются непрерывными кривыми или отрезками прямых, обусловленными изменением коэффициента усиления K от 0 до ¥;
5) КГ, не лежащие на оси вещественных чисел, симметричны относительно этой оси;
6) прямолинейные участки годографов, лежащие на оси вещественных чисел, обусловлены только вещественными полюсами и нулями (рисунки 3.22, 3.23 и 3.25);
7) в точках пересечения ветвей КГ с осью вещественных чисел два вещественных корня сливаются и далее превращаются в комплексно-сопряженные (рисунки 3.23 и 3.25);
8) точки пересечения ветвей КГ с осью мнимых чисел обусловлены чисто мнимыми корнями (рисунки 3.25).
Самой трудоемкой операцией МКГ является построение годографа. Наиболее известны методы У.Р.Эванса, Э.Г.Удермана, К.Ф.Теодорчика- Г.А.Бендрикова, позволяющие построить КГ системы даже вручную. Современные системы компьютерной математики (MATLAB, MathCAD, Maple) и моделирования САУ (МВТУ, SystemView) содержат встроенные функции автоматического построения и анализа КГ систем управления /12, 58/. Наиболее эффективно применение ПК при синтезе корректирующих устройств САУ методом доминирующих полюсов. Этот метод наряду с методом компенсации можно рассматривать как разновидность МКГ.
Понятие доминирующих (преобладающих) полюсов составляет основу метода доминирующих полюсов. Считают, что динамические свойства САУ определяет пара комплексно-сопряженных полюсов основной ПФ системы
s1, 2= -a ± jb,
называемых доминирующими. Другими словами, в качестве ММ синтезируемой САУ принимают К-звено с ПФ вида (2.19), т.е. принимают равенство
и подобие свойств замкнутой САУ и К-звена.
На первом этапе синтеза решают задачу определения доминирующих полюсов по заданным показателям качества синтезируемой САУ. Если заданы время регулирования tр, перерегулирование s или показатель колебательности M, действительную и мнимую части полюсов рассчитывают по следующим формулам:
 или
или  . (3.21)
. (3.21)
Затем наносят на комплексную плоскость вычисленные таким образом доминирующие полюсы s1, 2. Там же указывают полюсы pnи нули zmнеизменяемой части САУ, которые определяют по ПФ этой части Wн(s). Под ПФ неизменяемой части системы Wн(s) понимают ПФ разомкнутой нескорректированной САУ.
Второй этап синтеза заключается в отыскании дополнительных полюсов и нулей, принадлежащих корректирующему устройству (КУ). Их размещают на комплексной плоскости так, чтобы КГ скорректированной САУ проходил около доминирующих полюсов s1, 2. Рекомендуется скомпенсировать нулями ближайшие к мнимой оси полюсы неизменной части САУ для того, чтобы влияние доминирующих полюсов s1и s2на динамику системы было действительно определяющим.
Наконец, в случае необходимости увеличения коэффициента передачи системы K до заданного значения, вводят диполь. Диполем называют близко расположенные друг к другу дополнительные полюс и ноль. Введение диполя позволяет увеличить коэффициент передачи без заметного изменение показателей качества САУ.
По окончании коррекции составляют ПФ корректирующего устройства Wку(s), основываясь на введенных полюсах и нулях.
 Оценку качества скорректированной САУ проводят, как обычно, по переходной характеристике системы.
Оценку качества скорректированной САУ проводят, как обычно, по переходной характеристике системы.
Примером /51/ САР, требующей коррекции своих динамических свойств, служит система, структурная схема которой изображена на рисунке 3.26. Переходная характеристика САР hн(t) показана на рисунке 3.27. Очевидно, что требования к процессу регулирования

не выполнены. Необходимо синтезировать последовательное КУ, обеспечивающее выполнение указанных требований при K ³ 10.
Приняв первоначально tр = 0,5 и s = 0,2, согласно (3.21) рассчитывают доминирующие полюсы

Найденные доминирующие полюсы s1, 2лежат вдали от КГ нескомпенсированной САР (НСК на рисунке 3.28). Неизменяемая часть САУ обладает полюсами p1 = 0, p2 = -10 и p3 = -20. Ближайший из них к мнимой оси полюс p2 = -10 необходимо скомпенсировать нулем КУ  zку = ‑10. В свою очередь полюс КУ pкурасполагают вблизи от третьего полюса неизменяемой части системы p3 = -20. Наилучшим положением pкусчитают такое, при котором КГ скорректированной САР проходит через доминирующие полюсы s1, 2или в непосредственной близости от них (рисунок 3.28). Для исследуемой САР целесообразно принять полюс КУ pку = -24. Наконец, коэффициент передачи Kку = 2,4 обеспечивает совместно с zку = -10 и pку = -24 заданные показатели качества скомпенсированной САУ tр = 0,65 и s = 25 %.
zку = ‑10. В свою очередь полюс КУ pкурасполагают вблизи от третьего полюса неизменяемой части системы p3 = -20. Наилучшим положением pкусчитают такое, при котором КГ скорректированной САР проходит через доминирующие полюсы s1, 2или в непосредственной близости от них (рисунок 3.28). Для исследуемой САР целесообразно принять полюс КУ pку = -24. Наконец, коэффициент передачи Kку = 2,4 обеспечивает совместно с zку = -10 и pку = -24 заданные показатели качества скомпенсированной САУ tр = 0,65 и s = 25 %.
Таким образом, ПФ последовательного КУ
Структурная схема скомпенсированной САР показана на рисунке 3.29. Переходная характеристика системы hск(t) изображена на рисунке 3.27.
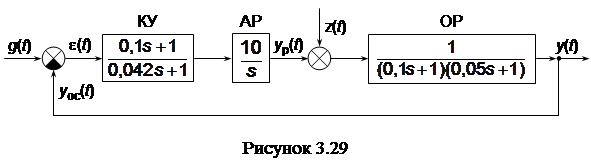 |
Синтезированное КУ относят к инерционным устройствам ПД-типа, описываемым ПФ общего вида

В рассматриваемом примере

так как  ; Kп = Kдzку = 1,0; T = 1/pку = 0,042.
; Kп = Kдzку = 1,0; T = 1/pку = 0,042.
Различают опережающую (|pку| > |zку|) и запаздывающую (|pку| < |zку|) коррекции. Следовательно, синтезировано ПД-устройство опережающего или форсирующего типа. Положительное ПД-воздействие (см. знак "+" в числителе ПФ) форсирует, т.е. ускоряет, процесс регулирования. Форсирующее действие КУ обусловлено начальным "всплеском" переходной характеристики h(t) ПД-звена (см. таблицу 2.2). Поэтому включение КУ названного типа в САУ повышает быстродействие последних (см. рисунок 3.27).
Наряду с последовательными КУ ПД-типа широко применяют корректирующие ПИ- и ПИД-звенья.
ПИ-звенья включают в контур регулирования в тех случаях, когда основные показатели качества САУ – длительность процесса регулирования tри перерегулирование s - удовлетворяют заданным требованиям, но коэффициент усиления мал. Его необходимо увеличить для уменьшения статической ошибки регулирования eg, см. равенство (2.42). При этом требуется сохранить неизменными показатели качества САУ tри s.
ПИД-звенья применяют в тех случаях, когда необходимо одновременно увеличить коэффициент усиления, повысить быстродействие САУ и уменьшить динамическое отклонение выходной величины ymax.
Выбор параметров названных КУ осуществляют МКГ аналогично синтезу ПД-звена в рассмотренном примере.
– Конец работы –
Эта тема принадлежит разделу:
Задачи и методы синтеза САУ
Контрольные вопросы... В чем состоит задача синтеза САУ...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Метод корневого годографа
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.034 сек.
Новости и инфо для студентов