рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Менеджмент
- /
- Метод стандартных коэффициентов
Реферат Курсовая Конспект
Метод стандартных коэффициентов
Метод стандартных коэффициентов - раздел Менеджмент, Задачи и методы синтеза САУ Метод Стандартных Коэффициентов Не Является Универсальным. Од...
Метод стандартных коэффициентов не является универсальным. Однако он нашел широкое применение благодаря своей простоте.
В основу метода положена связь между переходной характеристикой h(t) и основной ПФ системы управления F(s). Вид переходной характеристики определяется значением нулей zmи полюсов pnосновной ПФ системы. Для ряда типовых ПФ найдены "оптимальные" распределения нулей и полюсов, обусловливающие наиболее благоприятные переходные характеристики h(t) с точки зрения динамики синтезируемой САР. Каждому такому оптимальному распределению нулей и полюсов соответствуют вполне определенные значения коэффициентов полиномов числителя и знаменателя основной ПФ системы, которые называют стандартными.
Синтез САУ этим методом начинают с приведения основной ПФ системы (2.31)

к нормированному виду (форме Вышнеградского). Для этого аргумент ПФ s заменяют аргументом  и делят ее числитель и знаменатель на
и делят ее числитель и знаменатель на  . В результате получают нормированную ПФ (индекс аргумента "*" опущен):
. В результате получают нормированную ПФ (индекс аргумента "*" опущен):

где  ;
;  ; …;
; …;  ;
;  ;
;
 ;
;  ; …;
; …;  ;
;
 – среднегеометрическое значение корней характеристического уравнения замкнутой САУ D(s) = 0.
– среднегеометрическое значение корней характеристического уравнения замкнутой САУ D(s) = 0.
Если САУ описывается уравнением второго порядка (n = 2), величина  есть частота собственных колебаний системы.
есть частота собственных колебаний системы.
Приведение ПФ системы F(s) к нормированному виду F(s*)изменяет длительность процесса регулирования с tрна tр. Безразмерное время регулирования tр, соответствующее нормированной ПФ, и реальное время tр, соответствующее исходной ПФ F(s), связаны следующим образом:
 .
.
При этом величину принимают в качестве меры быстродействия системы управления: при одинаковом распределении полюсов и нулей нормированной ПФ время регулирования tрбудет тем меньше, чем больше .
Реальные САУ характеризуются небольшим порядком высшей производной числителя m. Поэтому стандартные коэффициенты определены для трех типовых нормированных ПФ:
1) не содержащих нулей (m = 0):
 (3.16)
(3.16)
2) с одним нулем (m = 1):
 (3.17)
(3.17)
3) с двумя нулями (m = 2):
 (3.18)
(3.18)
Названные коэффициенты A1– An-1обусловливают наименьшую длительность процесса регулирования tр. Обычно стандартные коэффициенты сводят в таблицы, в которых также указывают безразмерное время tрсоответственно порядку ПФ n.
Если САУ описывается первой типовой ПФ вида (3.16), т.е. не содержит нулей, наименьшей длительности переходного процесса (tр = tмин) достигают биномиальными коэффициентами A1, A2, …, An-1. В этом случае коэффициенты характеристического уравнения являются коэффициентами бинома Ньютона (s + 1)n. При биномиальных коэффициентах корни характеристического уравнения являются кратными (вещественными). Коэффициенты уравнений от первого (n = 1) до пятого (n = 5) порядка сведены в таблицу 3.1, которая содержит также соответственно безразмерное время регулирования tр. Переходные характеристики САУ с ПФ вида (3.16) и n = 1 ¸ 5 изображены на рисунке 3.17 и свидетельствуют об отсутствии перерегулирования, т.е. являются монотонными.
Процесс регулирования в САУ второго порядка (n = 2) названного качества достигается при коэффициенте демпфирования x = 1 (см. переходную характеристику 1 на рисунке 3.18).
| Таблица 3.1 – Биномиальные коэффициенты нормированной ПФ типа (3.16) | |||||||
| n | A4 | A3 | A2 | A1 | tр | ||
| – | – | – | – | 3,0 | |||
| – | – | – | 4,7 | ||||
| – | – | 6,3 | |||||
| – | 7,8 | ||||||
| 9,2 |
 Если в процессе регулирования допускается незначительное перерегулирование, т.е. переходная характеристика может быть апериодической, рекомендуется принять коэффициент демпфирования x = 0,7 ¸ 0,8. Известно, что при таком демпфировании переходные процессы в системе второго и более высоких порядков затухают быстрее, чем в случае x = 1. В результате длительность процесса регулирования будет меньше (см. переходную характеристику 2 на рисунке 3.18). Кратность корней характеристического уравнения утрачивается, поскольку они становятся комплексными. Все комплексные корни (и один вещественный при нечетном n) располагаются на одинаковом расстоянии h от оси мнимых чисел. Мнимые части корней образуют арифметическую прогрессию с разностью g и первым членом прогрессии также g.
Если в процессе регулирования допускается незначительное перерегулирование, т.е. переходная характеристика может быть апериодической, рекомендуется принять коэффициент демпфирования x = 0,7 ¸ 0,8. Известно, что при таком демпфировании переходные процессы в системе второго и более высоких порядков затухают быстрее, чем в случае x = 1. В результате длительность процесса регулирования будет меньше (см. переходную характеристику 2 на рисунке 3.18). Кратность корней характеристического уравнения утрачивается, поскольку они становятся комплексными. Все комплексные корни (и один вещественный при нечетном n) располагаются на одинаковом расстоянии h от оси мнимых чисел. Мнимые части корней образуют арифметическую прогрессию с разностью g и первым членом прогрессии также g.
Установлено оптимальное отношение m = g/h, которое обусловливает наименьшее безразмерное время регулирования tрсреди трех названных случаев. Соответствующие стандартные коэффициенты указаны в таблице 3.2.
| Таблица 3.2 – Стандартные коэффициенты нормированной ПФ типа (3.16), обеспечивающие минимальное время регулирования | ||||||||
| n | A4 | A3 | A2 | A1 | tр | s | ||
| – | – | – | – | 3,0 | – | |||
| – | – | – | 1,38 | 4,4 | 5,0 | |||
| – | – | 2,05 | 2,39 | 4,4 | – | |||
| – | 2,6 | 3,80 | 2,80 | 4,6 | 4,73 | |||
| 2,5 | 5,30 | 5,46 | 3,64 | 5,7 | – |
На рисунке 3.18 показаны эталонные переходные характеристики САУ с ПФ вида (3.16)
 (3.19)
(3.19)
и стандартными коэффициентами соответственно
1) 1; A1= 2,00; 1 (x = 1);
2) 1; A1= 1,50; 1 (x = 0,75);
3) 1; A1= 1,38; 1 (x = 0,69).
При синтезе АР стандартные коэффициенты используют следующим образом. Если синтезируемая САР (рисунок 3.19) содержит, например, П‑регулятор, то выбору подлежит коэффициент усиления регулятора KАР.
 |
В первую очередь определяют ПФ разомкнутой системы по (2.27)
и основную ПФ системы по (2.32)

Полученную основную ПФ системы нормируют следующим образом:

Поскольку ПФ не содержит нулей (m = 0), эталонной функцией является типовая ПФ вида (3.19) при n = 2

Для определения неизвестного коэффициента KАРсравнивают коэффициенты характеристических полиномов двух основных ПФ F(s) и Fэ(s) и получают систему алгебраических уравнений

На этом этапе синтеза АР система уравнений кроме KАРсодержит еще два неизвестных A1и W0. Коэффициент A1должен иметь стандартное значение. Его выбирают по таблицам стандартных коэффициентов в зависимости от принятой эталонной переходной характеристики (рисунок 3.18). Эталонную характеристику hэ(t) выбирают, в свою очередь, в соответствии с технологическим регламентом. Второе неизвестное рассчитывают, используя первое уравнение системы, по формуле

Затем определяют искомый коэффициент усиления П-регулятора

Если технологическим регламентом ограничена длительность процесса регулирования tр £ tmax, необходимо рассчитать действительное время регулирования tри убедиться в выполнении требования регламента. Для этого сначала определяют безразмерное время регулирования tрпо таблицам или по эталонной переходной характеристике hэ(t) (рисунок 3.18). Затем вычисляют действительное время регулирования tрпо формуле

В частности, если в рассматриваемом примере параметризации П‑регулятора (рисунок 3.19) в качестве эталонного принять монотонный процесс регулирования (переходная характеристика 1 на рисунке 3.18) и биномиальные коэффициенты, то в соответствии с таблицей 3.1 эталонная ПФ системы принимает вид

Если ОР характеризуется следующими параметрами KОР = 0,1 и TОР = 5, то частота собственных колебаний САР
Окончательно искомый коэффициент усиления П-регулятора

Действительное время регулирования при tр= 4,8 (см. таблицу 3.1)
Рассмотренные комбинации стандартных коэффициентов, связанные с кратным или близким к нему распределением корней характеристического уравнения САУ, эффективны при параметрической оптимизации систем, ПФ которых не имеют нулей. В противном случае процесс регулирования сопровождается заметным перерегулированием (s > 5 %). Для недопущения этого предложены другие комбинации стандартных коэффициентов, которым соответствует иное расположение корней характеристического уравнения САУ.
В случае САУ с основной ПФ типа (3.17) с одним нулем (m = 1) корни характеристического уравнения рекомендуется располагать на отрицательной вещественной полуоси в арифметической прогрессии. Коэффициенты характеристического полинома типовой ПФ вида (3.17) указаны в таблице 3.3.
| Таблица 3.3 – Стандартные коэффициенты нормированной ПФ типа (3.17) | ||||||||
| n | A4 | A3 | A2 | A1 | tр | s | ||
| – | – | – | – | 3,0 | – | |||
| – | – | – | 2,50 | 3,8 | 9,92 | |||
| – | – | 5,10 | 6,35 | 7,5 | 9,83 | |||
| – | 7,22 | 16,30 | 11,83 | 12,7 | 9,75 | |||
| 9,00 | 29,00 | 38,00 | 18,00 | > 16 | 10,2 |
Примером названной САУ становится рассмотренная в предыдущем примере система при изменении простейшего пропорционального закона регулирования на изодромное (рисунок 3.20).
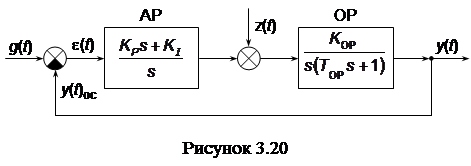 |
При использовании ПИ‑регулятора ПФ системы имеет вид
 ,
,
 .
.
Основная ПФ в нормированном виде

содержит только один ноль (m = 1). Поэтому эталонной является типовая ПФ вида (3.17) при (n = 3)

Сравнивая коэффициенты характеристических полиномов основных ПФ F(s) и Fэ(s), получают систему алгебраических уравнений
Согласно таблице 3.3 стандартные коэффициенты равны A1 = 6,35 и A2 = 5,10. Поскольку ОР сохраняет свои параметры без изменения, из первого уравнения этой системы следует, что
С помощью двух других алгебраических уравнений определяют искомые параметры настройки ПИ-регулятора

Действительное время регулирования

Переходная характеристика САР с ПИ-регулятором показана на рисунке 3.21.
В случае САУ с основной ПФ типа (3.18) с двумя нулями (m = 2) корни характеристического уравнения рекомендуется располагать на отрицательной вещественной полуоси в геометрической прогрессии. Коэффициенты характеристического полинома ПФ вида (3.18) представлены в таблице 3.4.
 Кроме рассмотренных стандартных коэффициентов типовых ПФ вида (3.16) – (3.18) известны иные коэффициенты и соответствующие им оптимальные переходные характеристики hэ(t), полученные с помощью интегральных критериев (см. п. 2.4.5.4). Названные коэффициенты и характеристики широко применяют при синтезе следящих приводов.
Кроме рассмотренных стандартных коэффициентов типовых ПФ вида (3.16) – (3.18) известны иные коэффициенты и соответствующие им оптимальные переходные характеристики hэ(t), полученные с помощью интегральных критериев (см. п. 2.4.5.4). Названные коэффициенты и характеристики широко применяют при синтезе следящих приводов.
| Таблица 3.4 – Стандартные коэффициенты нормированной ПФ типа (3.18) | ||||||||
| n | A4 | A3 | A2 | A1 | tр | s | ||
| – | – | 6,7 | 6,7 | 1,6 | 10,2 | |||
| – | 7,9 | 15,0 | 7,9 | 4,4 | 20,9 | |||
| 69,0 | 69,0 | 18,0 | 8,5 | 19,8 |
Минимизацией квадратичного функционала J20получены стандартные коэффициенты типовой ПФ вида (3.16), которые представлены в таблице 3.5.
| Таблица 3.5 – Стандартные коэффициенты нормированной ПФ типа (3.16), обеспечивающие минимум квадратичного функционала J20 | ||||||||
| n | A4 | A3 | A2 | A1 | tр | s | ||
| – | – | – | – | 3,0 | – | |||
| – | – | – | 5,3 | 16,3 | ||||
| – | – | 8,7 | 7,26 | |||||
| – | 10,3 | 14,2 | ||||||
| 12,5 | 11,5 |
Д.Грехем и Р.Летроп получили стандартные коэффициенты типовой ПФ вида (3.16) (таблица 3.6) при минимизации интеграла от абсолютного значения ошибки J10.
| Таблица 3.6 – Стандартные коэффициенты нормированной ПФ типа (3.16), обеспечивающие минимум квадратичного функционала J10 | ||||||||
| n | A4 | A3 | A2 | A1 | tр | s | ||
| – | – | – | – | – | – | |||
| – | – | – | 1,40 | 2,9 | 4,60 | |||
| – | – | 1,75 | 2,15 | 3,6 | 1,98 | |||
| – | 2,10 | 3,40 | 2,70 | 4,3 | 1,92 | |||
| 2,80 | 5,00 | 5,50 | 3,40 | 5,2 | 2,10 |
В таблице 3.7 представлены стандартные коэффициенты Баттерворта (идеальный фильтр), которые раньше других начали применять при оптимизации электроприводов.
| Таблица 3.7 – Стандартные коэффициенты Баттерворта | ||||||||
| n | A4 | A3 | A2 | A1 | tр | s | ||
| – | – | – | – | – | – | |||
| – | – | – | 1,40 | 2,9 | 4,60 | |||
| – | – | 2,00 | 2,00 | 6,0 | 8,14 | |||
| – | 2,60 | 3,40 | 2,60 | 6,9 | 11,10 | |||
| 3,24 | 5,24 | 5,24 | 3,24 | 7,6 | 12,70 |
Внешнее отличие названных коэффициентов проявляется их симметричным распределением подобно биномиальным коэффициентам. Однако переходная характеристика САУ приобретает перерегулирование и колебательностью превосходит аналогичные характеристики. Время регулирования, обусловленное коэффициентами Баттерворта, также самое большое среди рассмотренных ранее. Тем не менее в этом случае САУ обладает наиболее широкой полосой пропускания гармонических полезных сигналов при заданной статической ошибке регулирования. Другими словами, модуль АЧХ системы управления  в широком диапазоне частот. Поэтому электроприводы, настроенные по Баттерворту, называют настроенными на модульный оптимум (см. п. 2.5.10).
в широком диапазоне частот. Поэтому электроприводы, настроенные по Баттерворту, называют настроенными на модульный оптимум (см. п. 2.5.10).
– Конец работы –
Эта тема принадлежит разделу:
Задачи и методы синтеза САУ
Контрольные вопросы... В чем состоит задача синтеза САУ...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Метод стандартных коэффициентов
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.023 сек.
Новости и инфо для студентов