рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Философия
- /
- Выбор чувствительного элемента и построение структурной схемы простейшей динамической системы управления
Реферат Курсовая Конспект
Выбор чувствительного элемента и построение структурной схемы простейшей динамической системы управления
Выбор чувствительного элемента и построение структурной схемы простейшей динамической системы управления - раздел Философия, ДИНАМИЧЕСКАЯ СИСТЕМА С ИСПОЛНИТЕЛЬНЫМ ДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА Некоторые Основные Положения Применения Чувствительных Элемен...
Некоторые основные положения применения чувствительных элементов в различных ДСУ приведены в разделе 1. Здесь остановимся на вопросе выбора чувствительных элементов для ДСУ несколько подробнее.
В качестве чувствительных элементов простейших динамических систем управления могут использоваться резисторные датчики постоянного или переменного тока, сельсины, вращающиеся трансформаторы и т.д. Во всяком случае, чувствительные элементы предназначены для преобразования угловых или линейных перемещений в пропорциональный этим перемещениям электрический сигнал. При выборе вида чувствительного элемента следует учитывать его статическую характеристику. Основные виды статических характеристик чувствительных элементов приведены на рис. 15.
Так как чувствительные элементы предназначены для функционирования в основных режимах при малых по абсолютной величине перемещениях, то они могут быть представлены линейной математической моделью (2), структурная схема которой представлена на рис. 2.
При построении структурной схемы простейшей динамической системы управления необходимо учесть следующее.

Рис. 15. Статические характеристики чувствительных элементов: а)- линейная реверсивная или двухтактная; б)- линейная нереверсивная или однотактная; в)- нелинейная реверсивная или двухтактная; г)- нелинейная нереверсивная или однотактная; д)- нелинейная неоднозначная (гистерезисная); е)- нелинейная с разрывом непрерывности
Для согласования выхода чувствительного элемента с входом исполнительного двигателя используется усилительное устройство, в котором обычно предусматриваются возможности включения средств коррекции, обеспечивающих выбор законов управления. Средства коррекции представляют собой три разновидности. Во-первых, это местные отрицательные обратные связи, например, по первой и второй производным от угла поворота исполнительной оси (объекта управления). Во-вторых, звенья последовательной коррекции, например, пассивное интегродифференцирующее звено. И, наконец, в-третьих, компенсирующие сигналы, например, по первой и второй производным от угла поворота командной оси с включенными с ними встречно сигналами по первой и второй производным от угла поворота исполнительной оси.
Для того чтобы подать на вход системы управления сигнал, пропорциональный углу поворота командной оси  , его следует получить физически. С этой целью к ротору чувствительного элемента достаточно приложить управляющий момент
, его следует получить физически. С этой целью к ротору чувствительного элемента достаточно приложить управляющий момент  .
.
Если этот сигнал умножить на коэффициент  , величина которого равна обратной величине момента инерции ротора чувствительного элемента, то будет получена вторая производная от угла поворота командной оси
, величина которого равна обратной величине момента инерции ротора чувствительного элемента, то будет получена вторая производная от угла поворота командной оси  .
.
Первую производную от угла поворота командной оси  можно определить, умножив вторую производную на оператор
можно определить, умножив вторую производную на оператор  , что соответствует операции интегрирования.
, что соответствует операции интегрирования.
Повторное умножение полученного сигнала на позволяет получить искомый угол поворота  .
.
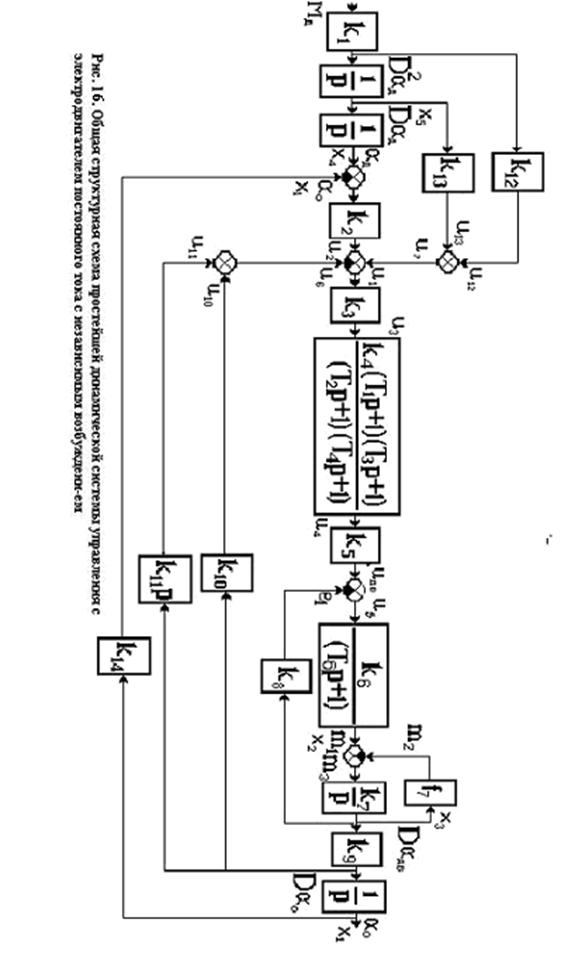
С учетом изложенного структурная схема простейшей динамической системы управления примет вид рис. 16, где введены следующие обозначения:
 – коэффициент передачи или крутизна чувствительного элемента;
– коэффициент передачи или крутизна чувствительного элемента;
 – коэффициент усиления предварительного каскада усилителя;
– коэффициент усиления предварительного каскада усилителя;
 – параметры пассивного звена последовательной коррекции;
– параметры пассивного звена последовательной коррекции;
 – коэффициент усиления выходного каскада усилителя;
– коэффициент усиления выходного каскада усилителя;
 – коэффициент передачи электродвигателя постоянного тока с независимым возбуждением;
– коэффициент передачи электродвигателя постоянного тока с независимым возбуждением;
 – электромагнитная постоянная времени электродвигателя постоянного тока с независимым возбуждением;
– электромагнитная постоянная времени электродвигателя постоянного тока с независимым возбуждением;
 – коэффициент, обратный величине приведенного момента инерции электродвигателя постоянного тока с независимым возбуждением;
– коэффициент, обратный величине приведенного момента инерции электродвигателя постоянного тока с независимым возбуждением;
 – коэффициент эквивалентного вязкого трения электродвигателя постоянного тока с независимым возбуждением;
– коэффициент эквивалентного вязкого трения электродвигателя постоянного тока с независимым возбуждением;
 – конструктивная постоянная электродвигателя постоянного тока с независимым возбуждением;
– конструктивная постоянная электродвигателя постоянного тока с независимым возбуждением;
 – передаточное отношение редуктора (механической передачи);
– передаточное отношение редуктора (механической передачи);
 – коэффициент передачи местной обратной связи по скорости объекта управления;
– коэффициент передачи местной обратной связи по скорости объекта управления;
 – коэффициент передачи местной обратной связи по ускорению объекта управления;
– коэффициент передачи местной обратной связи по ускорению объекта управления;
 – коэффициент передачи по задаваемому ускорению (второй производной от угла поворота рукоятки управления);
– коэффициент передачи по задаваемому ускорению (второй производной от угла поворота рукоятки управления);
 – коэффициент передачи по задаваемой скорости (первой производной от угла поворота рукоятки управления);
– коэффициент передачи по задаваемой скорости (первой производной от угла поворота рукоятки управления);
 – коэффициент передачи цепи главной обратной связи, который принимает одно из двух значений: 1 – при замкнутой и 0 – при разомкнутой главной обратной связи.
– коэффициент передачи цепи главной обратной связи, который принимает одно из двух значений: 1 – при замкнутой и 0 – при разомкнутой главной обратной связи.
Кроме перечисленных параметров, в схеме обозначены следующие переменные:
 – момент, прикладываемый человеком-оператором к командной (дающей) оси (к рукоятке управления);
– момент, прикладываемый человеком-оператором к командной (дающей) оси (к рукоятке управления);
 – вторая производная от угла поворота командной (дающей) оси (ускорение рукоятки управления);
– вторая производная от угла поворота командной (дающей) оси (ускорение рукоятки управления);
 – первая производная от угла поворота командной (дающей) оси (скорость рукоятки управления);
– первая производная от угла поворота командной (дающей) оси (скорость рукоятки управления);
 – угол поворота командной (дающей) оси (положение рукоятки управления);
– угол поворота командной (дающей) оси (положение рукоятки управления);
 – угол рассогласования (ошибка);
– угол рассогласования (ошибка);
 – напряжение, пропорциональное ускорению командной (дающей) оси (инвариантный вход по ускорению);
– напряжение, пропорциональное ускорению командной (дающей) оси (инвариантный вход по ускорению);
 – напряжение, пропорциональное скорости командной (дающей) оси (инвариантный вход по скорости);
– напряжение, пропорциональное скорости командной (дающей) оси (инвариантный вход по скорости);
 – напряжение, пропорциональное углу рассогласования (ошибке) (выходное напряжение чувствительного элемента);
– напряжение, пропорциональное углу рассогласования (ошибке) (выходное напряжение чувствительного элемента);
 – угол поворота объекта управления (отработки);
– угол поворота объекта управления (отработки);
 – суммарное напряжение компенсационных сигналов по скорости и ускорению командной (дающей) оси (суммарная поправка инвариантных входов);
– суммарное напряжение компенсационных сигналов по скорости и ускорению командной (дающей) оси (суммарная поправка инвариантных входов);
 – суммарное напряжение сигналов по скорости и ускорению объекта управления (отработки);
– суммарное напряжение сигналов по скорости и ускорению объекта управления (отработки);
 – входное напряжение электронного усилителя;
– входное напряжение электронного усилителя;
 – входное напряжение звена последовательной коррекции;
– входное напряжение звена последовательной коррекции;
 – выходное напряжение звена последовательной коррекции, где
– выходное напряжение звена последовательной коррекции, где  – передаточная функция этого звена;
– передаточная функция этого звена;
 – входное напряжение электронного усилителя (входное напряжение электродвигателя или напряжение на его якоре);
– входное напряжение электронного усилителя (входное напряжение электродвигателя или напряжение на его якоре);
 – противо-ЭДС электродвигателя постоянного тока с независимым возбуждением;
– противо-ЭДС электродвигателя постоянного тока с независимым возбуждением;
 – ЭДС электродвигателя постоянного тока с независимым возбуждением;
– ЭДС электродвигателя постоянного тока с независимым возбуждением;
 – электромагнитный момент электродвигателя постоянного тока с независимым возбуждением, где
– электромагнитный момент электродвигателя постоянного тока с независимым возбуждением, где  – передаточная функция электромагнитного преобразования энергии в электродвигателе постоянного тока с независимым возбуждением;
– передаточная функция электромагнитного преобразования энергии в электродвигателе постоянного тока с независимым возбуждением;
 – приведенный к оси электродвигателя постоянного тока с независимым возбуждением момент сил трения;
– приведенный к оси электродвигателя постоянного тока с независимым возбуждением момент сил трения;
 – суммарный момент на оси электродвигателя постоянного тока с независимым возбуждением (его выходной момент);
– суммарный момент на оси электродвигателя постоянного тока с независимым возбуждением (его выходной момент);
 – скорость вращения якоря электродвигателя постоянного тока с независимым возбуждением;
– скорость вращения якоря электродвигателя постоянного тока с независимым возбуждением;
 – первая производная от угла поворота объекта управления (отработки).
– первая производная от угла поворота объекта управления (отработки).
Преобразуем структурную схему рис. 16 к виду одного динамического звена (при этом будем считать, что формирование входного сигнала уже проведено):
1) приравняем нулю коэффициенты в цепях местных обратных связей  ;
;
2) приравняем нулю постоянные времени звена последовательной коррекции:  ;
;
3) приравняем нулю коэффициенты в цепях сигналов компенсации  ;
;
4) коэффициент передачи звена последовательной коррекции приравняем единице:  .
.
В результате структурная схема простейшей динамической системы управления примет вид рис. 17. Коэффициенты такой системы могут быть подсчитаны следующим образом:



 (59)
(59)
 |
Рис. 17. Структурная схема динамической системы управления с исполнительным электродвигателем постоянного тока с независимым возбуждением без учета средств коррекции
– Конец работы –
Эта тема принадлежит разделу:
ДИНАМИЧЕСКАЯ СИСТЕМА С ИСПОЛНИТЕЛЬНЫМ ДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА
ДИНАМИЧЕСКАЯ СИСТЕМА... С ИСПОЛНИТЕЛЬНЫМ ДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Выбор чувствительного элемента и построение структурной схемы простейшей динамической системы управления
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.033 сек.
Новости и инфо для студентов