рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Образование
- /
- Порядок проведения расчета
Реферат Курсовая Конспект
Порядок проведения расчета
Порядок проведения расчета - раздел Образование, Основной целью курсового проектирования является подготовка к комплексному проектированию определенной машины или механизма Порядок Кинетостатического Расчета Покажем На Примере: Требуется Опр...
Порядок кинетостатического расчета покажем на примере:
Требуется определить давление в кинематических парах, уравновешивающую силу (момент) двигателя внутреннего сгорания с горизонтальным расположением цилиндра (см. рис. 15.).
Известны закон изменения внешних сил (индикаторная диаграмма), веса звеньев G1,G2,G3; угловая скорость вращения звена 1; длины всех звеньев; расстояние AS2 до центра тяжести звена 2; момент инерции шатуна относительно оси, проходящей через центр тяжести JS2.
1. Строим планы скоростей и ускорений. Вычисляем масштабы Кv и Кa .
2. Определяем силы инерции.
Сила инерции поступательно движущегося звена 3 (поршня) равна:

Направлена против вектора ускорения .
.
Силы инерции звена 2 (шатуна), совершающего плоское движение, сведутся к главному вектору сил инерции РИ2, приложенному к центру тяжести S2 и направленному против ускорения центра тяжести, и к главному моменту сил инерции МИ2, направленному против углового ускорения ε2.
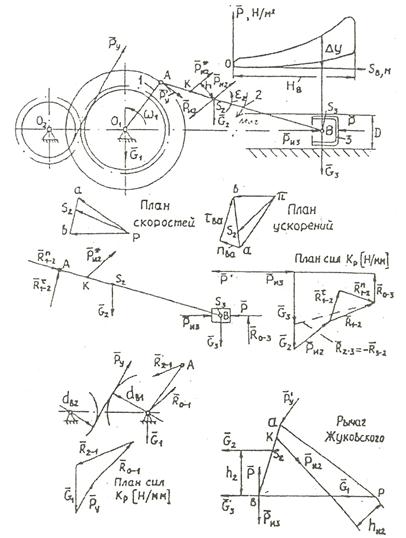
Рис. 15.

Силу PИ2 и момент МИ2 можно заменить одной силой  , приложенной в точке К – центре качания на расстоянии b от центра тяжести. Для этого заменим момент MИ2 парой сил, равных PИ2 , с тем же моментом. Тогда
, приложенной в точке К – центре качания на расстоянии b от центра тяжести. Для этого заменим момент MИ2 парой сил, равных PИ2 , с тем же моментом. Тогда  , откуда
, откуда  . Силы PИ2 в центре тяжести уравновесятся и останется одна равнодействующая сила , приложенная в центре качания К на расстоянии h от центра тяжести.
. Силы PИ2 в центре тяжести уравновесятся и останется одна равнодействующая сила , приложенная в центре качания К на расстоянии h от центра тяжести.
3. Определяем давление в кинематических парах.
Начинаем с анализа последней, считая от кривошипа, присоединенной группы Ассура и заканчиваем, последовательно переходя от одной группы к другой, анализом звена 1.
В нашем примере к кривошипу присоединена лишь одна группа Ассура II класса 2 порядка 2 вида (с внешней поступательной парой). На эту группу действует сила давления газов

сила тяжести поршня G3, сила инерции поршня РИ3 ; сила инерции шатуна РИ2 ; вес шатуна G2 ; реакция отброшенного звена R1-2, которую разлагаем на  – перпендикулярную шатуну, и
– перпендикулярную шатуну, и  – вдоль шатуна и реакция стойки R0-3.
– вдоль шатуна и реакция стойки R0-3.
Уравнение равновесия группы под действием этих сил имеет следующий вид:

Величину и направление силы легко найти из уравнения моментов всех сил, действующих на звено 2, относительно точки В. Если рассматривать условие равновесия звена 2, то

Зная , строим план сил в такой последовательности:

Далее, из конца вектора проводим линию действия  , а из начала вектора
, а из начала вектора  проводим направление
проводим направление  по вертикали. Точка пересечения этих двух направлений и определит величины векторов и .
по вертикали. Точка пересечения этих двух направлений и определит величины векторов и .
Ha основании плана сил легко определить величину  и величину реакции
и величину реакции  . Для определения
. Для определения  воспользуемся уравнением равновесия звена 3:
воспользуемся уравнением равновесия звена 3:

Найдем теперь точку приложения силы  , для чего, исходя из условия равновесия звена 3, составим уравнение моментов относительно точки В всех сил, действующих на звено 3:
, для чего, исходя из условия равновесия звена 3, составим уравнение моментов относительно точки В всех сил, действующих на звено 3:

то сила  приложена в точке В.
приложена в точке В.
Переходим к определению давления в шарнире O1. На звено 1 действует сила реакции  отброшенного звена 2, сила веса
отброшенного звена 2, сила веса  , сила реакции опоры
, сила реакции опоры  и уравновешивающая сила
и уравновешивающая сила  , проходящая вдоль линии зацепления колеса, насаженного на ось кривошипа 1.
, проходящая вдоль линии зацепления колеса, насаженного на ось кривошипа 1.
Уравновешивающую силу легко найти, приравняв к нулю сумму моментов всех сил, действующих на кривошип 1 относительно точки О1:

Реакцию  можно найти, построив план сил, действующих на звено 1.
можно найти, построив план сил, действующих на звено 1.

4. Определим уравновешивающую силу  с помощью рычага Жуковского.
с помощью рычага Жуковского.
Строим план скоростей и в соответствующих точках прикладываем внешние силы и силы инерции, повернув их по часовой стрелке (или против) на 90˚.
В точке a прикладываем перпендикулярно  силу . Составляем уравнение равновесия рычага
силу . Составляем уравнение равновесия рычага  и находим .
и находим .


Моменты сил  и должны быть одинаковы, т. е.
и должны быть одинаковы, т. е.

Допустимое отклонение 10%.
6. РАСЧЕТ МАХОВИКА С ПОМОЩЬЮ ДИАГРАММЫ ВИТТЕНБАУЭРА
6.1. Общие сведения
В теории механизмов и машин для упрощения задачи исследования механизма последний заменяют моделью, состоящей из одной приведенной массы mПР с моментом инерции JПР, на которую действуют приведенные силы – движущая  и сила полезных сопротивлений
и сила полезных сопротивлений  с приведенными
с приведенными  и
и  (см. рис. 16).
(см. рис. 16).
Уравнение движения звена приведения в дифференциальной форме имеет вид:

Несоответствие между приведенными к начальному звену (кривошипу) моментами сил движущих и сил сопротивления, а также изменение приведенного момента инерции механизма вызывают при установившемся неравновесном движении машины периодические изменения угловой скорости от ω1min до ω1max.
Формула, определяющая коэффициент неравномерности хода машины δ, позволяет оценить неравномерность вращения звена приведения.


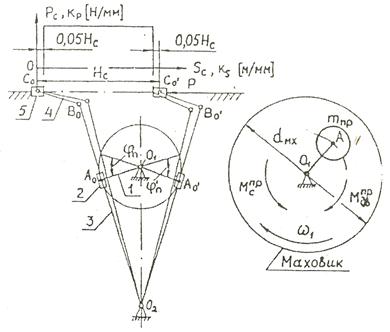
Рис. 16.
Из уравнения (1) видно, что для уменьшения колебаний угловой скорости, а следовательно, и ε1, надо увеличить  постановкой маховика с моментом инерции
постановкой маховика с моментом инерции  .
.
Следовательно, соответствующим подбором маховика можно заставить ведущее звено двигаться с заранее заданными отклонениями от средней угловой скорости, регулируя тем самым ход машины.
6.2. Расчет маховика
Полагаем, что кинематический расчет для всех положений механизма проделан и скорости точек звеньев известны. Приводим порядок расчета для строгального станка, схема которого показана на рис. 5.
1. Определяют для каждого положения механизма приведенный к главному валу станка момент сил сопротивления определенный из условия равенства мощности приведенного момента и мощности силы полезного сопротивления по формуле

где  – сила сопротивления, Н;
– сила сопротивления, Н;
рс – отрезок плана скоростей, выражающей скорость точки приложения силы Р;
ра – отрезок плана скоростей, выражающий скорость пальца кривошипа, к которому приводят силу;
r01A – радиус кривошипа, м.
Затем в масштабах  и
и  строят график (рис. 17)
строят график (рис. 17)

В тех заданиях, где имеются перебеги ведомого звена, при определении их нужно учесть (см. рис. 17). При этом иногда возникает необходимость дополнительного построения плана скоростей для положения кривошипа на углах  и
и  .
.
(в случае двигателя строят график  .
.
Результаты расчетов следует занести в таблицу.
2. Графическим интегрированием (рис. 17) графика моментов сил строят график работ  в масштабе
в масштабе  , где Н – полюсное расстояние (в случае двигателя строят график
, где Н – полюсное расстояние (в случае двигателя строят график  . Размерность
. Размерность  .
.
3. За период установившегося движения  , то есть
, то есть  . Считаем
. Считаем  , поэтому график
, поэтому график  должен получиться в виде прямой линии. Чтобы получить график , соединим начало координат с точкой К графика .
должен получиться в виде прямой линии. Чтобы получить график , соединим начало координат с точкой К графика .
4. Дифференцируя диаграмму получают прямоугольную диаграмму в том же масштабе КM (для двигателя дифференцируют диаграмму  и получают диаграмму для ).
и получают диаграмму для ).
5. Вычитая графически из ординат графика ординаты диаграммы , строят график изменения кинетической энергии:

в масштабе KE = KA и Kφ.
6. Определяют для всех положений механизма приведенный к главному звену момент инерции исходя из условия, что кинетическая энергия звена приведения должна быть равна сумме кинетических энергий всех звеньев машины без маховика.

отсюда 
Результаты расчетов сводят в таблицу с указанием номера положения, величин отрезков из плана скоростей, величин слагаемых и значений приведенного момента инерции без маховика.
Строят график  , повернутый на 90˚ по часовой стрелке (см. рис. 17) в масштабе KJ и Kφ.
, повернутый на 90˚ по часовой стрелке (см. рис. 17) в масштабе KJ и Kφ.
7. Графически исключают параметр φ1 и строят график "энергия – масса"

При построении для каждого положения кривошипа проводят параллельно осям абсцисс линии через соответствующие ординаты графиков  и . Соединяют точки пересечения этих линий.
и . Соединяют точки пересечения этих линий.
8. Из формул (6.2) и (6.3) определяют ω1min и ω1max по заданным ω1СР и δ:
9. Находят углы ψmax и ψmin из формул:

Под углом ψmax проводят крайнюю верхнюю касательную к кривой графика и под углом ψmin проводят к ней нижнюю касательную. В точке пересечения касательных получаем начало координат графика 
10. Расстояние между новыми и старыми осями координат определят величины  и JMX.
и JMX.
Тогда  . Однако при малых значениях δ точка пересечения касательных уходит за пределы чертежа и тогда момент инерции маховика, насаженного на главный вал машины, определяется по формуле:
. Однако при малых значениях δ точка пересечения касательных уходит за пределы чертежа и тогда момент инерции маховика, насаженного на главный вал машины, определяется по формуле:

где BC – отрезок, отсекаемый касательными на оси ординат .
11. Задаваясь из конструктивных соображений диаметром маховика  , (см. рис. 16),
, (см. рис. 16),
можно определить вес обода маховика  .
.
Вес маховика со ступицей и спицами равен  .
.
Чтобы не произошло разрыва маховика от центробежных сил инерции и перенапряжения обода, следует проверить окружную скорость на ободе.
Для чугунных маховиков должно соблюдаться условие:

Если вес маховика получается очень большим, его можно уменьшить, установив маховик на более быстроходный вал, причем кинетическая энергия маховика не должна измениться.
Отсюда 
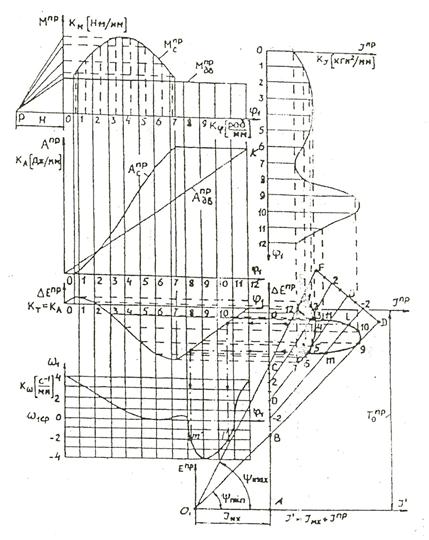
Рис. 17.
12. Строят график изменения угловой скорости главного звена  .
.
Если начало координат графика  находятся в пределах чертежа, то, соединяя соответствующую точку графика с началом координат O1 и определяя угол ψ1, находят угловую скорость в i-м положении.
находятся в пределах чертежа, то, соединяя соответствующую точку графика с началом координат O1 и определяя угол ψ1, находят угловую скорость в i-м положении.

Если же точка O1 вышла за пределы чертежа, то можно сначала определить кинетическую энергию в начальном положении по формуле, вытекающей из рис. 17.

Знак плюс берется при положении точки С ниже точки О, а знак минус при расположении точки С выше О. Затем для каждого механизма определяются из графика

и находится угловая скорость ω1 по формуле  .
.
График может быть также построен графическим способом с достаточной для практических целей точностью, но с существенно меньшей затратой времени.
С этой целью оба луча, касающихся графика пересекаем двумя произвольными прямыми, например, ВС и FD. Затем каждый из этих отрезков делится на равное число частей и непременно четное, например, на 8. Полученные точки следует пронумеровать аналогично тому, как это показано на рис. 17.
На графике  проводится такое количество параллельных оси абсцисс
проводится такое количество параллельных оси абсцисс  линий на равном друг от друга расстоянии, которое определяется масштабом из того условия, что полученный график будет расположен между линиями 4-4.
линий на равном друг от друга расстоянии, которое определяется масштабом из того условия, что полученный график будет расположен между линиями 4-4.
Соединим, например, точки -2 на отрезках ВС и FD линией, которая пересекает диаграмму в точках l и m.
Перенося эти точки на соответствующее им место на диаграмме  , а затем на одноименную прямую графика
, а затем на одноименную прямую графика  , получим точки l' и m' на линии -2. Получив ряд точек, соединяем их плавной кривой. В тех местах, где поведение кривой неясно, следует увеличить число делений.
, получим точки l' и m' на линии -2. Получив ряд точек, соединяем их плавной кривой. В тех местах, где поведение кривой неясно, следует увеличить число делений.
При построении искомого графика следует иметь в виду, что если лучи на диаграмме перемещаются к касательной с ψmin, то угловая скорость уменьшается, и наоборот, если они движутся к линии с ψmax .
Масштабный коэффициент Кω определяется по формуле

13. Определяют мощность двигателя по формуле 
где  – работа движущих сил за период, Дж
– работа движущих сил за период, Дж
T – время периода, с
η – КПД машины, принимается равным 0,8.
– Конец работы –
Эта тема принадлежит разделу:
Основной целью курсового проектирования является подготовка к комплексному проектированию определенной машины или механизма
ИЖЕВСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ ИЖЕВСК СОДЕРЖАНИЕ ВВЕДЕНИЕ... ВВЕДЕНИЕ...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Порядок проведения расчета
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.05 сек.
Новости и инфо для студентов