рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Образование
- /
- Метрический синтез плоских механизмов с низшими кинематическими парами
Реферат Курсовая Конспект
Метрический синтез плоских механизмов с низшими кинематическими парами
Метрический синтез плоских механизмов с низшими кинематическими парами - раздел Образование, Основной целью курсового проектирования является подготовка к комплексному проектированию определенной машины или механизма Задачей Метрического Синтеза Является Определение Размеров Звеньев Механизма,...
Задачей метрического синтеза является определение размеров звеньев механизма, удовлетворяющих некоторым заданным условиям.
Пусть, например, задан коэффициент производительности К, равный отношению средней скорости холостого хода ведомого звена к средней скорости его рабочего хода. При постоянной угловой скорости ведущего звена будем иметь:

где H – ход ползуна;
tх – время холостого хода;
tр – время рабочего хода;
φх и φр – соответствующие им углы поворота кривошипа;
θ – острый угол между крайними положениями кривошипа. Из формулы (2.1) получим
 (2.2)
(2.2)
Рассмотрим несколько примеров.
Пример 1. В нецентральном кривошипно-ползунном механизме (рис. 1, а) требуется определить длину шатуна l и радиус кривошипа r по заданным коэффициенту К и дезаксиалу е.
Решение задачи проводим графически в следующем порядке:
1) откладываем отрезок  (рис. 1, б);
(рис. 1, б);
2) из т. В´´ проводим перпендикуляр к В´B´´;
3) из т. В´ проводим прямую под углом (90°-θ) до пересечения ее с перпендикуляром в т. N;
4) из середины О прямой BN, как из центра, проводим окружность радиусом ON, являющуюся геометрическим местом возможных центров вращения кривошипа;
5) параллельно отрезку В´B´´ на расстоянии е проводим прямую, точка пересечения которой с окружностью В´B´´N будет центром вращения кривошипа O1.
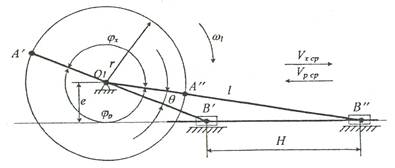
Рис. 1, а.
Крайние положения ползуна определяются размерами:
 ;
;  .
.
Поэтому

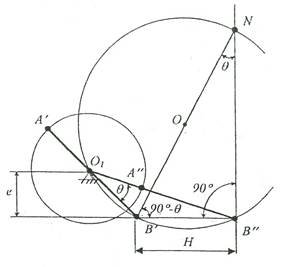
Рис. 1, б.
 Примечание: если в задаче дезаксиал e равен нулю, то очевидно из рис.1, б, что разность отрезков
Примечание: если в задаче дезаксиал e равен нулю, то очевидно из рис.1, б, что разность отрезков  , откуда следует, что в этом случае
, откуда следует, что в этом случае  .
.
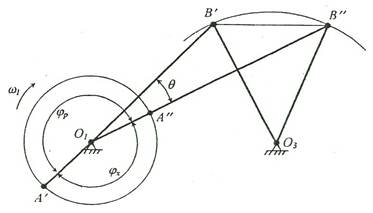
Рис. 1, в.
Аналогичным способом можно решить задачу синтеза шарнирного четырехзвенника рис.1, в, если заданы K, расстояние между стойками O1O3 и длина хорды, соединяющая концы коромысла в крайних положениях B´B´´ (см., например, задания № 4, 21).
Пример 2. Требуется определить длину стойки O1O2 качающейся кулисы (рис.2), если заданы К и радиус кривошипа r. Определяем угол θ по формуле (2.2). Тогда из треугольника O2A´O1 ( или O2A´´O1 ) следует:
 .
.
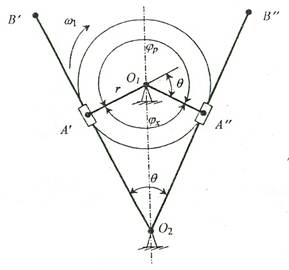
Рис. 2.
Пример 3. На рис. 3 представлена схема кулисного механизма с двумя кривошипами. Задано: r, ход H, отношение  и K. Определить длину стойки а и размеры b и c.
и K. Определить длину стойки а и размеры b и c.
По формуле (2.2) определяем угол θ, после чего из треугольника O1O2A´ имеем:  . Длина второго кривошипа
. Длина второго кривошипа  , а длина шатуна
, а длина шатуна  .
.
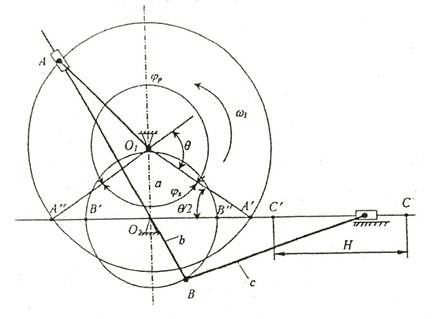
Рис. 3
Пример 4. В коромысло-ползунном механизме ( рис. 4 ) требуется определить длину шатуна l. Заданы: H – ход ползуна, отношение l/r, углы φ1 и φ2, соответствующие крайним положениям кривошипа r.
Из рис 4 видно, что
 .
.
Разделив полученное выражение на l, после небольших преобразований получаем:
 ;
;
Углы γ1 и γ2 можно определить соответственно из треугольников A1LB1 и A2KB2.
 =>
=>
Из треугольника A2KB2
 =>
=>
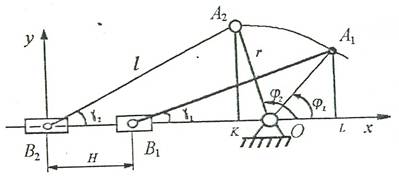
Рис. 4.
2.2. Структурный анализ механизма
Знать структуру механизма необходимо для выбора метода кинематического и силового анализа. Методику проведения структурного анализа поясним на примере кулисного механизма (рис. 5). Количество подвижных звеньев изображенного механизма n=5. Звенья соединяются между собой при помощи вращательных кинематических пар (0-1, 1-2, 0-3, 3-4, 4-5) и двух поступательных пар (2-3 и 5-0). Все пары V класса. Степень подвижности механизма вычисляем по формуле Чебышева

Ведущее звено O1A. Ведомая часть состоит из двух двухповодковых групп Ассура: звенья 2 и 3 образуют группу II класса, 2-го порядка, 3-го вида, а звенья 4 и 5 группу II класса, 2-го порядка, 2-го вида. Формула построения механизма может быть записана в следующем виде:

На рис. 5 показана схема построения механизма. Исследуемый механизм является механизмом II класса.
2.3. Кинематическое исследование механизма
Существует 3 метода кинематического исследования рычажного механизма: графо-аналитический (метод планов), графический (метод кинематических диаграмм), аналитический.
В выбранном масштабе K1 вычерчивается кинематическая схема механизма в нулевом положении (за нулевое положение принимается крайнее положение звеньев механизма в начале рабочего хода).
После этого производится разметка положений всех звеньев механизма. Траекторию конца кривошипа делят на 12 равных частей в направлении вращения ведущего звена. Методом засечек размечают положения остальных звеньев. Если второе крайнее положение ведомого звена не попадает в равномерную разметку, то оно определяется дополнительно.
Для всех положений строятся планы скоростей в условном масштабе K1 кривошипов и планы ускорений в условном масштабе K2 кривошипов. Масштабы планов скоростей и ускорений подсчитывают по формулам
 (2.4)
(2.4)
 (2.5)
(2.5)
где ω1 – угловая скорость ведущего звена.
Для наглядного представления об изменении кинематических параметров рабочего органа механизма в течение периода строятся диаграммы: S=S(t), V=V(t), a=a(t).
Построение диаграмм производится в следующем порядке:
1. На основании полученной разметки траектории точки ведомого звена в прямоугольных координатах строят график S=S(t) в масштабе Ks [м/мм].
2. Графически дифференцируя по методу хорд, получают график V=V(t). Масштаб скорости подсчитывается по формуле
 (2.6)
(2.6)
где H1 – полюсное расстояние, выбираемое на чертеже произвольно.
3. Графически дифференцируя график V=V(t) по методу хорд, получают график a=a(t). Масштаб ускорений определяется по формуле
 (2.7)
(2.7)
где H2 – полюсное расстояние при вторичном дифференцировании.
4. Для сравнения результатов кинематического анализа составляется таблица по следующей форме
| № п/п | Истинная скорость точки ведомого звена, м/с | Истинное ускорение точки ведомого звена, м/с2 | ||||
| По плану скоростей | По диаграмме V=V(t) | Аналити- чески, ЭВМ | По плану ускорений | По диаграмме а=а(t) | Аналити- чески, ЭВМ | |
Пример построения планов скоростей и ускорений для кулисного механизма (рис. 5)
Вычерчиваем механизм в масштабе (М 1:5, или KL = 0,0050 м/мм, рис. 5, а). Строим план скоростей (рис. 5, в) для изображенного положения в условном масштабе одного кривошипа (K1=1). Построение следует начинать с ведущего звена и первой группы Ассура, присоединенной к нему.
Из произвольно выбранной точки Р, принимаемой за полюс, откладываем отрезок  , изображающий скорость т. А1 кривошипа, которую можно рассматривать как геометрическую сумму переносной вращательной скорости точки A3 кулисы и относительной поступательной скорости точки вдоль кулисы
, изображающий скорость т. А1 кривошипа, которую можно рассматривать как геометрическую сумму переносной вращательной скорости точки A3 кулисы и относительной поступательной скорости точки вдоль кулисы


Из т. а1 плана скоростей проводим прямую параллельно O2A, а из полюса Р – прямую, перпендикулярную О2А, и в точке их пересечения ставим букву а3. Отрезок pа3 изображает в масштабе Kv скорость т. A3 кулисы, а отрезок a1a3 – относительную скорость т. A, вдоль кулисы. Отрезок pb на плане скоростей, соответствующий скорости т. B находится из пропорции
Скорость т. C определяется построением геометрического равенства


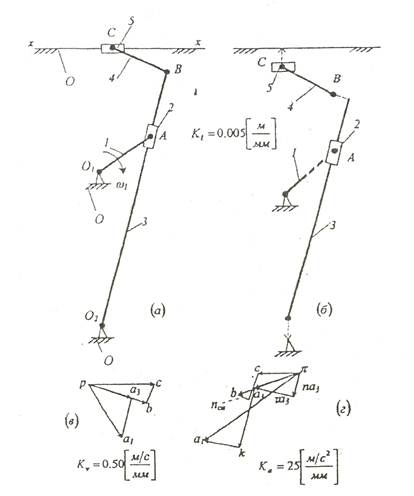

Рис. 5.
Масштаб плана скоростей

 Построим для того же положения план ускорений (рис. 5, г) в условном масштабе двух кривошипов (K2=2). Из произвольно выбранной точки π, принимаемой за полюс плана ускорений, откладываем отрезок
Построим для того же положения план ускорений (рис. 5, г) в условном масштабе двух кривошипов (K2=2). Из произвольно выбранной точки π, принимаемой за полюс плана ускорений, откладываем отрезок  параллельно O1А, который будет изображать нормальное ускорение т. А1 кривошипа.
параллельно O1А, который будет изображать нормальное ускорение т. А1 кривошипа.
Так как т. A1 кривошипа участвует в переносном вращательном движении вместе с кулисой и относительном вдоль кулисы, то абсолютное ускорение т. А1 будет состоять из переносного, относительного и кориолисова ускорений
 (2.8)
(2.8)
Истинное значение  определяется по формуле
определяется по формуле
а величина отрезка в мм, изображающего его на плане ускорений
где pa3 – отрезок в мм, взятый с плана скоростей, построенного в масштабе K1 кривошипа;
O2A – отрезок в мм, взятый с плана механизма, вычерченного в масштабе K1.
Тангенциальная составляющая  известна только по направлению –
известна только по направлению –  . Относительное ускорение
. Относительное ускорение  известно только по направлению – параллельно
известно только по направлению – параллельно  .
.
Истинное значение кориолисова ускорения равно

а величина отрезка, изображающего его на плане ускорений,
Чтобы определить направление кориолисова ускорения, нужно вектор относительной скорости  повернуть на 90˚ в сторону вращения кулисы. В нашем случае относительная скорость
повернуть на 90˚ в сторону вращения кулисы. В нашем случае относительная скорость  направлена от А к O2, а звено 3 – кулиса вращается по часовой стрелке. Повернув вектор по часовой стрелке, мы и получаем направление
направлена от А к O2, а звено 3 – кулиса вращается по часовой стрелке. Повернув вектор по часовой стрелке, мы и получаем направление  .
.
В геометрическом равенстве (2.8) неизвестны величины двух ускорений  и
и  , которые и определяются из построения плана ускорений.
, которые и определяются из построения плана ускорений.
Ускорение т. В имеет такое же направление, что  . Его чертежная величина находится из уравнения
. Его чертежная величина находится из уравнения
Величина ускорения т. С определяется графическим решением векторного уравнения

Истинное значение  определяется по формуле
определяется по формуле
величина отрезка, изображающего его на плане ускорений,
где bc – отрезок в мм, взятый с плана скоростей;
ВС – отрезок в мм, взятый с плана механизма.
Тангенциальная составляющая  известна только по направлению
известна только по направлению , а абсолютное ускорение т. С направлено по горизонтали. Величины этих векторов определяются построением.
, а абсолютное ускорение т. С направлено по горизонтали. Величины этих векторов определяются построением.
Масштаб плана ускорений вычисляем по формуле

Пример графического дифференцирования методом хорд.
Дан график S=S(t) (рис. 6). Разбиваем его на ряд участков, и на каждом из них кривую пути заменяем хордой. Тем самым мы заменяем движение с непрерывно меняющейся скоростью на ряд равномерных движений в пределах каждого участка со скоростями, изменяющимися скачками и равными на каждом участке средним скоростям истинного движения.
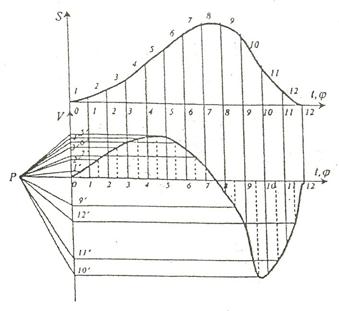
Рис. 6.
Из произвольно взятого на продолжении оси t полюса P проводим ряд лучей P1´, Р2´, P3´ и т.д. параллельно соответствующим хордам. Отрезки 01´, 02´, 03´ и т.д. представят тогда масштабные средние скорости для каждого участка, которые будут совпадать с истинным графиком скорости приблизительно в серединах участков. Поэтому в серединах участков и отмечаем точки с ординатами 01´, 02´, 03´ и т.д., которые соединяем плавной линией. Полученная кривая будет графиком скорости по времени. Масштаб  определяется по формуле (2.6).
определяется по формуле (2.6).
Аналитический метод.
Рассмотрим способ, который можно назвать способом замкнутых векторных контуров, разработанный Зиновьевым В.А.
Исследование начинается с простейшего механизма, включающего ведущее звено, первую присоединенную группу Ассура и стойку. Для этого механизма составляются уравнения, отражающие зависимость линейных и угловых координат звеньев от выбранной обобщенной координаты, за которую принимают угол поворота ведущего звена (эти уравнения называются функциями положений звеньев). Такие уравнения получают путем использования так называемого уравнения замкнутости векторного контура механизма.
Далее составленные уравнения дифференцируют по обобщенной координате. В результате выводят формулы для определения передаточных функций скоростей звеньев (аналогов скоростей). Повторное дифференцирование позволяет получить формулы для определения передаточных функций ускорений (аналогов ускорений).
Затем рассматривается следующий простейший механизм, в котором за ведущее звено принимается одно из звеньев (например, звено 3) первой группы Ассура, а ведомыми являются звенья второй группы. Для этого механизма также записываются функции положения звеньев, в которых за обобщенную координату принимается координата звена 3. Далее производится дифференцирование этих уравнений аналогично вышеизложенному.
Истинные положения звеньев, их скорости и ускорения находят после того, как будут известны зависимости обобщённой координаты и ее производных (обобщенной скорости и обобщенного ускорения) от времени.
Подробно этот способ применительно ко всем заданиям на курсовой проект изложен в [1].
– Конец работы –
Эта тема принадлежит разделу:
Основной целью курсового проектирования является подготовка к комплексному проектированию определенной машины или механизма
ИЖЕВСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ ИЖЕВСК СОДЕРЖАНИЕ ВВЕДЕНИЕ... ВВЕДЕНИЕ...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Метрический синтез плоских механизмов с низшими кинематическими парами
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.017 сек.
Новости и инфо для студентов