рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Образование
- /
- ПРОЕКТИРОВАНИЕ КУЛАЧКОВОГО МЕХАНИЗМА
Реферат Курсовая Конспект
ПРОЕКТИРОВАНИЕ КУЛАЧКОВОГО МЕХАНИЗМА
ПРОЕКТИРОВАНИЕ КУЛАЧКОВОГО МЕХАНИЗМА - раздел Образование, Основной целью курсового проектирования является подготовка к комплексному проектированию определенной машины или механизма Задача Проектирования Кулачкового Механизма Состоит В Построении Профиля Кула...
Задача проектирования кулачкового механизма состоит в построении профиля кулачка по заданным законам движения кулачка и толкателя (кинематический синтез) и динамическим условиям (минимальному углу передачи движения  ). Углом передачи движения γ называется угол между направлениями абсолютной и относительной скоростей толкателя.
). Углом передачи движения γ называется угол между направлениями абсолютной и относительной скоростей толкателя.
3.1. Графическое интегрирование по методу хорд
Закон движения ведомого звена кулачкового механизма задан графиком ускорения a=a(t) (рис. 7) или аналогом ускорений  . Для кулачка с качающимся толкателем задано
. Для кулачка с качающимся толкателем задано  или
или 
Для построения профиля кулачка нужно иметь закон изменения перемещения толкателя по времени, который можно найти, дважды графически интегрируя график a=a(t).
Порядок графического интегрирования:
1. В произвольном масштабе Ка и масштабе Kφ строим диаграмму ускорений толкателя.

где φу – угол удаления в градусах;
ω – угловая скорость кулачка;
l – отрезок оси абсцисс, изображающий угол φу , в мм.
При построении диаграммы ускорений следует учитывать, что отношение ординат h´ и h´´, соответствующих максимальным значениям ускорений при удалении и возвращении, связано зависимостью 
2. Углы φу и φв делим на равные части таким образом, чтобы момент времени, при котором a=0, совпадал с одним из делений. Если  , то промежутки времени 0-1, 1-2 … на участке удаления могут быть не равны промежуткам времени на участке возвращения.
, то промежутки времени 0-1, 1-2 … на участке удаления могут быть не равны промежуткам времени на участке возвращения.
3. В серединах промежутков 0-1, 1-2, 2-3 … проводим ординаты до пересечения с кривой графика и полученные точки сносим на ось ординат. Получаем ряд точек 1´, 2´, 3´ …
На участке 1-2, где кривая ускорений имеет экстремум, ордината 02´ должна быть подобрана такой, чтобы площадь прямоугольника с высотой 02´ и основанием 1-2 была равна площади фигуры с тем же основанием и ограниченной сверху кривой ускорений. То же относится и к участку 4-5.
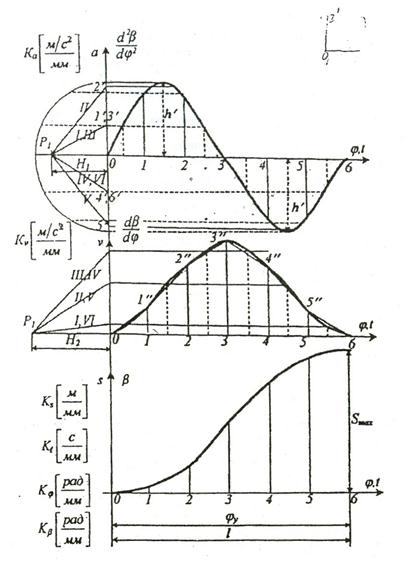
Рис. 7.
4. Соединяя произвольно взятую на продолжении оси t точку Р1, принимаемую за полюс, с точками 1´, 2´, 3´ получаем лучи I, II, III …
5. На графике V=V(t) из т. О проводим в интервале 0-1 прямую 0-1'', параллельно лучу 1, в интервале 1-2 - прямую 1''-2'', параллельную лучу II и т.д. Полученная ломаная линия (в пределе кривая) представляет кривую изменения скорости по времени.
6. Аналогично интегрируя кривую V=V(t), получаем кривую перемещения S=S(t).
7. Определяем масштабы диаграмм, начиная с масштаба KS.
 – для кулачкового механизма с поступательно движущимся толкателем,
– для кулачкового механизма с поступательно движущимся толкателем,
где h - ход толкателя, м;
Smax – максимальная ордината графика S=S(t).

Для кулачкового механизма с качающимся толкателем определяют масштабы Kβ и KS
 ,
,  ,
,
где βmax – максимальный угол качания коромысла, в градусах;
lAB – длина коромысла, м.
Примечание:
1. На рис. 7 показано построение синусоиды. Для этого слева от оси а проводится полуокружность диаметром 2h´, которая затем делится на 6 равных частей. Из точек деления проводятся прямые параллельные оси абсцисс до пересечения с соответствующими ординатами. Найденные таким образом точки принадлежат синусоиде. Аналогично следует строить косинусоиду.
2. На рис. 7 показано построение графиков движения только для участка удаления.
3.2. Определение минимального радиуса кулачка
При проектировании кулачкового механизма очень важно правильно выбрать минимальный радиус кулачка r0min . Определение r0min является одной из задач динамического синтеза кулачковых механизмов. Рассмотрим решение этой задачи применительно к конкретным схемам кулачковых механизмов.
1. Нецентральный кулачковый механизм с поступательно движущимся толкателем (рис. 8).
Заданы: угол γmin , эксцентриситет е, ω1 и графики движения толкателя  ,
,  .
.
Величина угла передачи движения определяется по формуле

где Si – путь, пройденный толкателем при повороте кулачка из начального положения в данное, берется из графика ;
Vi – скорость толкателя в рассматриваемом положении, берется из графика V=V(t);
Smin – величина, определяющая крайнее (нижнее) положение толкателя.
Задача динамического синтеза в данном случае сводится к определению такого значения Smin, при котором в любом положении угол передачи  .
.
Если бы мы знали положение, в котором величина угла γi достигает наименьшего значения, то Smin можно было бы определить по формуле, вытекающей из формулы (3.1).

Эту задачу можно решить графическим способом [4]. Следует также обращать внимание на расположении линии толкателя относительно центра вращения кулачка: при вращении кулачка против часовой стрелки выгоднее располагать ее справа от центра вращения О, так как в этом случае получаются большие значения угла передачи γ при удалении при одной и той же величине r0 min , а следовательно, и более благоприятные динамические условия работы кулачкового механизма.
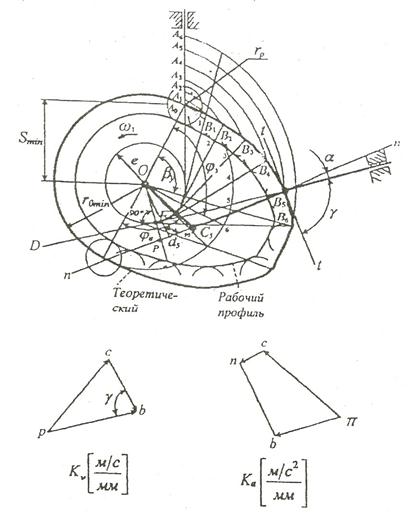
Рис. 8.
2. Коромысловый кулачковый механизм
Заданы: угол γmin , длина коромысла lAB , график движения толкателя S=S(t) и V=V(t), ω1 , βmax .
Угол передачи движения в этом случае определяется по формуле

где ψi – угол, составленный коромыслом в рассматриваемом положении с линией центров ОВ;
Vi – скорость т. А коромысла, взятая с графика ;
e – длина перпендикуляра, опущенного из т. O на направление скорости т. А; знак плюс или минус берется в зависимости от того, как расположен этот отрезок, справа или слева от центра О.
Задача динамического синтеза здесь сводится к определению начальных параметров кулачкового механизма: lOB, r0 min и угла ψ0, который составляет коромысло в крайнем положении A0B0 с линией центра ОВ.
Проще всего эта задача решается графическим способом (рис. 9):
1. Изображаем коромысло AB в двух крайних положениях в масштабе Kl.
2. Траекторию движения т. А коромысла делим на части в соответствии с диаграммой пути , получаем точки A1, A2, A3…, соединив которые с точкой B, получаем мгновенные положения толкателя.
3. В каждом положении коромысла откладываем векторы  в том же масштабе Kl. Для определения направления вектора
в том же масштабе Kl. Для определения направления вектора  необходимо вектор скорости
необходимо вектор скорости  повернуть на 90˚ в направлении вращения кулачка.
повернуть на 90˚ в направлении вращения кулачка.
4. Из точек Mi под углом γmin к данному положению коромысла проводим прямые MiCi . Заштрихованная область – область возможных центров вращения кулачка. Расстояние OA0 будет равно r0 min . Одновременно определяются расстояние lOB и угол ψ0 .

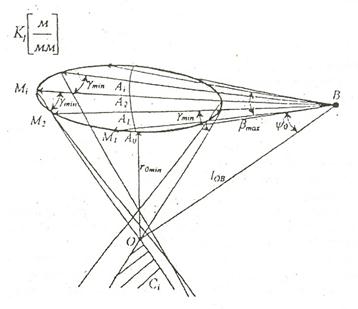
Рис. 9.
3.3. Профилирование кулачка
Рассмотрим два случая построения профиля кулачка.
I. Толкатель перемещается поступательно (рис. 8).
Дано: график пути  , эксцентриситет e и r0 min . Профиль кулачка строим в положении начала подъема толкателя. Порядок построения следующий:
, эксцентриситет e и r0 min . Профиль кулачка строим в положении начала подъема толкателя. Порядок построения следующий:
1. Из центра О строим окружность радиуса е и проводим касательную к ней вертикальную прямую, которая будет линией движения толкателя.
2. Проводим из центра О окружность радиусом r0 min . От т. A0 пересечения линии движения толкателя с этой окружностью размечаем путь толкателя согласно графику S=S(t), получаем точки A1, A2, A3 и т.д.
3. Обращаем движение кулачкового механизма. От радиуса OA0 откладываем в направлении, обратном вращению кулачка, углы φу, φд, φв. Делим угол  по окружности радиуса r0 min на равные части соответственно промежуткам на графике получаем точки 1,2,3…6.
по окружности радиуса r0 min на равные части соответственно промежуткам на графике получаем точки 1,2,3…6.
4. Через точки деления проводим касательные к окружности радиуса e и засекаем их радиусами OA1, OA2, OA3 и т.д. Соединяя полученные точки плавной линией, получаем теоретический профиль удаления. Аналогично строим профиль возвращения. Внутренняя огибающая окружностей, описанных радиусом ролика, центр которого перемещается по теоретическому профилю, образует искомый (рабочий) профиль кулачка. Радиус ролика выбирается из следующих соотношений:

где ρmin – минимальный радиус кривизны профиля кулачка.
Из двух значений rp принимается наименьшее. Если e=0, то радиусами OA1, OA2… засекаются соответствующие лучи, проведенные из центра вращения кулачка.
II. Коромысловый кулачковый механизм (рис. 10).
Задано: график , длина коромысла lAB , угол βmax.
1. Определив положение центра О, проводим окружность радиусом rmin .
2. На дуге, описанной из центра B0 радиусом lAB, проводим разметку пути т. А согласно графику и обозначаем точки буквами A1, A2, A3…
3. Обращаем движение. Из центра О радиусом ОВ0 описываем дугу и в направлении, обратном вращению кулачка, откладываем от радиуса OB0 углы φy, φд, φв которые делим затем на равные части соответственно промежуткам графика ; обозначаем полученные точки деления B0, B1, B2 и т.д.
4. Из точек В1, B2, B3… проводим дуги радиусом lAB, а из центра O засекаем их радиусами OA1, OA2, OA3… Соединяя точки пересечения построенных дуг плавной кривой, получаем теоретический профиль.
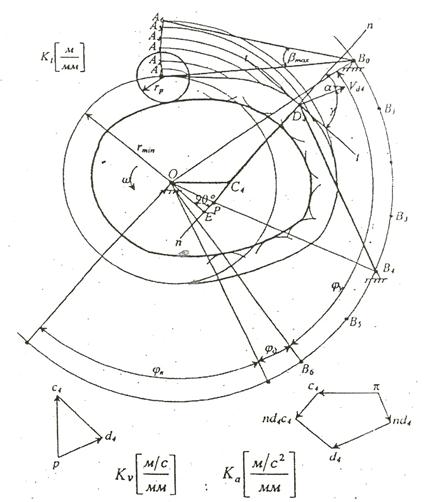
Рис. 10.
3.4. Построение заменяющего механизма
Кинематика ведомого звена (толкателя) может быть исследована методом построения плана скоростей и ускорений для механизма с низшими парами, заменяющего кулачковый.
Замена осуществляется следующим образом: высшая пара заменяется дополнительным звеном и двумя низшими парами. Дополнительное звено представляет собой сумму радиусов кривизны соприкасающихся профилей и располагается по общей нормали к ним. В центрах кривизны (а их два) располагаются шарниры, которыми дополнительное звено с одной стороны соединяется с ведомым звеном, а с другой – со звеном, вращающимся вокруг оси кулачка.
Вычерчиваем заменяющий механизм, строим для него план скоростей и ускорений. Значения скорости и ускорений толкателя следует сравнить со значениями, взятыми из кинематической диаграммы для данного положения.
– Конец работы –
Эта тема принадлежит разделу:
Основной целью курсового проектирования является подготовка к комплексному проектированию определенной машины или механизма
ИЖЕВСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ ИЖЕВСК СОДЕРЖАНИЕ ВВЕДЕНИЕ... ВВЕДЕНИЕ...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: ПРОЕКТИРОВАНИЕ КУЛАЧКОВОГО МЕХАНИЗМА
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.037 сек.
Новости и инфо для студентов