рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Физика
- /
- Асинхронная электрическая машина
Реферат Курсовая Конспект
Асинхронная электрическая машина
Асинхронная электрическая машина - раздел Физика, Магнитные цепи с постоянной магнитодвижущей силой Самым Распространенным Двигателем В Промышленности Является А...
Самым распространенным двигателем в промышленности является асинхронный двигатель. На рис.2.10 показаны конструкция и схема включения статорных и роторных обмоток трехфазного асинхронного двигателя.
|
|
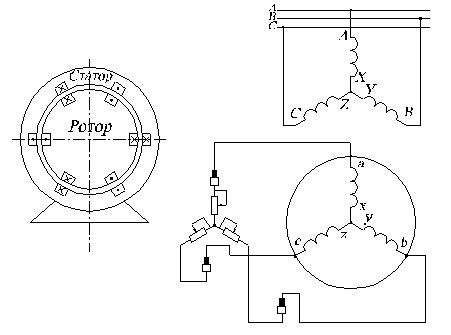
Рис.2.10. Конструкция (а) и схема включения статорных и роторных обмоток (б) трехфазного асинхронного двигателя
В неподвижном статоре расположены три катушки, создающие круговое вращающееся магнитное поле, а во вращающемся роторе – три катушки, замкнутые накоротко или на внешние сопротивления через контактные кольца и щетки. Если число катушек обмотки статора равно 3, т. е. на каждую фазу одна катушка, то за одну минуту вектор  сделает 60f оборотов вокруг оси статора. При необходимости иметь меньшую скорость применяются многополюсные обмотки. Каждая обмотка имеет одну пару полюсов. Если к каждой фазе подключить
сделает 60f оборотов вокруг оси статора. При необходимости иметь меньшую скорость применяются многополюсные обмотки. Каждая обмотка имеет одну пару полюсов. Если к каждой фазе подключить  катушек, то общее число катушек обмотки статора будет равно
катушек, то общее число катушек обмотки статора будет равно  . Для характеристики размещения обмотки вдоль рабочего зазора двигателя введено понятие полюсного деления
. Для характеристики размещения обмотки вдоль рабочего зазора двигателя введено понятие полюсного деления  :
:
 , (2.7)
, (2.7)
где
D – внутренний диаметр статора.
За один период переменного тока вращающееся магнитное поле поворачивается на двойное полюсное деление 2:  , а полный оборот вокруг оси машины оно делает за периодов. Следовательно:
, а полный оборот вокруг оси машины оно делает за периодов. Следовательно:
за время ( ) с - 1 оборот;
) с - 1 оборот;
за 1с.-  [оборотов];
[оборотов];
за минуту в 60 раз больше, т. е.
 [об/мин], (2.8)
[об/мин], (2.8)
где
 - частота питающей сети.
- частота питающей сети.
Вращающийся магнитный поток Ф индуктирует в обмотках статора и ротора ЭДС  и
и  .
.
Так как обмотка ротора закорочена, то в ней возникает ток  , который, взаимодействуя с магнитным полем, вызовет появление вращающегося момента
, который, взаимодействуя с магнитным полем, вызовет появление вращающегося момента  . В результате ротор начнет вращаться в сторону вращения магнитного поля. Величина ЭДС и частота
. В результате ротор начнет вращаться в сторону вращения магнитного поля. Величина ЭДС и частота  ее изменения зависят от скорости пересечения вращающим магнитным полем проводников обмотки ротора, т. е. от разности скоростей вращения магнитного поля
ее изменения зависят от скорости пересечения вращающим магнитным полем проводников обмотки ротора, т. е. от разности скоростей вращения магнитного поля  и ротора
и ротора  . При равенстве этих скоростей ЭДС , частота , ток и момент будут равны нулю. По этой причине электрические машины, работающие на этом принципе, называют асинхронными.
. При равенстве этих скоростей ЭДС , частота , ток и момент будут равны нулю. По этой причине электрические машины, работающие на этом принципе, называют асинхронными.
Относительная разность скоростей вращения поля и ротора
 (2.9)
(2.9)
называется скольжением. Нетрудно видеть, что
 . (2.10)
. (2.10)
В заторможенном режиме асинхронная машина работает в режиме трансформатора; ее схема замещения подобна схеме замещения приведенного трансформатора. Ток холостого хода асинхронной машины значительно выше, чем у трансформатора, так как в ней имеется рабочий зазор. Поэтому этот режим работы машины редко применяется.
В рабочем режиме частота равна
 ;
;
 ; (2.11)
; (2.11)
 ; (2.12)
; (2.12)
 . (2.13)
. (2.13)
Энергетическая диаграмма работы машины имеет вид (рис.2.11):
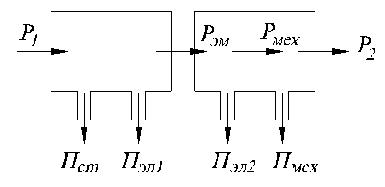
Рис.2.11.Энергетическая диаграмма работы электрической машины.
Мощность, потребляемую из электрической сети можно определить, используя выражение:
 .
.
В ротор передается электромагнитная мощность  (рис.2.11).
(рис.2.11).
Часть этой мощности расходуется на покрытие электрических потерь в обмотке ротора; оставшаяся часть превращается в механическую мощность
 .
.
Потери в сердечнике ротора из-за малой величины частоты (1¸3 Гц) практически отсутствуют. Для электромагнитной мощности можно написать:
 ,
,
где
 - угловая скорость вращения магнитного поля.
- угловая скорость вращения магнитного поля.
 ,
,
где
 - угловая скорость вращения ротора.
- угловая скорость вращения ротора.
 .
.
Отсюда
 (2.14)
(2.14)
Подставив сюда: 

 ,
,
получаем:
 (2.15)
(2.15)
 Схема замещения цепи ротора при его вращении имеет вид (рис.2.12):
Схема замещения цепи ротора при его вращении имеет вид (рис.2.12):
Рис.2.12. Схема замещения цепи ротора.
Из рис.2.12 можем записать:
 .
.
Так как 
 (здесь
(здесь  - индуктивное сопротивление заторможенного ротора), то
- индуктивное сопротивление заторможенного ротора), то
 . (2.16)
. (2.16)
Теперь схему замещения ротора можно представить в виде (рис.2.13):
|
|
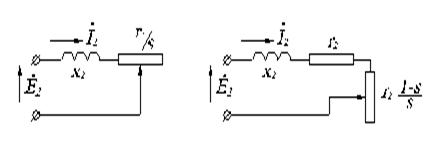
Рис.2.13. Схема замещения роторной цепи машины при вращении ротора без выделения (а) и с выделением (б) сопротивления механической мощности.
Сопротивление  учитывает выходную механическую мощность асинхронной машины (рис. 2.13б). Полная схема замещения асинхронной машины имеет вид (рис.2.14а):
учитывает выходную механическую мощность асинхронной машины (рис. 2.13б). Полная схема замещения асинхронной машины имеет вид (рис.2.14а):

а) б)
Рис.2.14 Полная схема замещения асинхронной короткозамкнутой машины (а) и ее упрощенная схема (б).
Без большой погрешности намагничивающую часть схемы можно непосредственно подключить к питающему напряжению  (рис.2.14б). Ошибка, вносимая этим допущением, невелика потому, что в последней схеме не учитывается лишь влияние падения напряжения на активном сопротивлении первичной обмотки
(рис.2.14б). Ошибка, вносимая этим допущением, невелика потому, что в последней схеме не учитывается лишь влияние падения напряжения на активном сопротивлении первичной обмотки  и индуктивности рассеяния первичной обмотки
и индуктивности рассеяния первичной обмотки  от намагничивающего тока
от намагничивающего тока  на величину тока ротора. Эта схема не отражает зависимости намагничивающего тока от нагрузки двигателя, так как определяет неизменное значение этого тока
на величину тока ротора. Эта схема не отражает зависимости намагничивающего тока от нагрузки двигателя, так как определяет неизменное значение этого тока
Определим ток фазы ротора как функцию параметров двигателя:
 , (2.17)
, (2.17)
где  - индуктивное сопротивление короткого замыкания.
- индуктивное сопротивление короткого замыкания.
Величина определяется выражением
 .
.
Критическое скольжение, соответствующее максимуму момента определяется дифференцированием полученного выражения по  и последующим приравниванием к нулю результата:
и последующим приравниванием к нулю результата:
 . (2.18)
. (2.18)
Подставив полученное выражение в зависимость  , получим
, получим
 . (2.19)
. (2.19)
С учетом последних двух зависимостей, выражение для M может быть представлено в виде так называемой уточненной формулы Клосса:
 , (2.20)
, (2.20)
где
 . (2.21)
. (2.21)
Анализ выражения механической характеристики показывает, что при  она близка к линейной зависимости
она близка к линейной зависимости  , а в области больших скольжений
, а в области больших скольжений  имеет гиперболический характер:
имеет гиперболический характер:  . Максимальный момент, развиваемый асинхронной машиной в двигательном режиме
. Максимальный момент, развиваемый асинхронной машиной в двигательном режиме  меньше, чем соответствующее значение момента для генераторного режима работы
меньше, чем соответствующее значение момента для генераторного режима работы  . С помощью выражения для
. С помощью выражения для  эту разницу можно выразить количественно:
эту разницу можно выразить количественно:
 , (2.22)
, (2.22)
где
 - модуль критического скольжения.
- модуль критического скольжения.
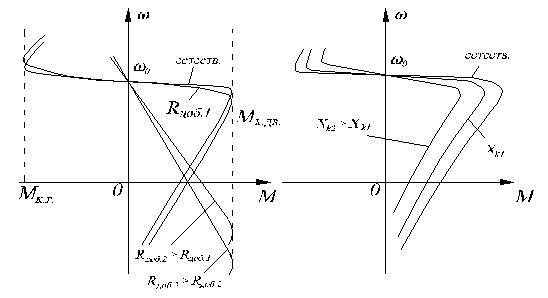
По выражению (2.20) на рис. 2.15 построена зависимость момента от скольжения M=F(s).

Рис. 2.15. Зависимость момента асинхронной машины от скольжения.
В реальных асинхронных машинах ЭДС и магнитный поток при работе машины в двигательном режиме по мере роста нагрузки и связанного с ним падения напряжения в цепи статора снижаются. Изменение фазы тока статора и падения напряжения на сопротивлении  приводят к тому, что ЭДС двигателя и поток
приводят к тому, что ЭДС двигателя и поток  в области малых скольжений возрастают и превышают значения, соответствующие идеальному холостому ходу. Поэтому в соответствии с выражением
в области малых скольжений возрастают и превышают значения, соответствующие идеальному холостому ходу. Поэтому в соответствии с выражением  максимум момента в генераторном режиме при
максимум момента в генераторном режиме при  больше, чем в двигательном. Двигатель с фазным ротором обеспечивает возможность изменения параметров цепей ротора путем введения добавочных сопротивлений. Механические характеристики двигателя с фазным ротором (2.16а):
больше, чем в двигательном. Двигатель с фазным ротором обеспечивает возможность изменения параметров цепей ротора путем введения добавочных сопротивлений. Механические характеристики двигателя с фазным ротором (2.16а):
а) б)

в) г)
Рис. 2.16. Механические характеристики асинхронной машины при различных способах управления изменениями: активного сопротивления в цепи ротора (а), реактивного сопротивления в цепи статора (б), напряжения (в) и частоты (г) питающей цепи.
Максимум момента не зависит от величины суммарного сопротивления в цепи фазы ротора, а критическое скольжение увеличивается пропорционально суммарному сопротивлению  :
:
 .
.
Из характеристик рис. 2.16a видно, что при пуске двигателя выгодно иметь большое сопротивление  , т.к. при этом обеспечивается большая величина пускового момента. Увеличение сопротивления в цепи ротора ограничивает также ток в двигателе в режиме противовключения. Плавным изменением сопротивления
, т.к. при этом обеспечивается большая величина пускового момента. Увеличение сопротивления в цепи ротора ограничивает также ток в двигателе в режиме противовключения. Плавным изменением сопротивления  при торможении противовключением и последующем пуске в противоположном направлении можно обеспечить постоянство тормозного и пускового моментов двигателя в этих режимах.
при торможении противовключением и последующем пуске в противоположном направлении можно обеспечить постоянство тормозного и пускового моментов двигателя в этих режимах.
Модуль жесткости рабочего участка механической характеристики обратно пропорционален величине , поэтому реостатные характеристики двигателя при больших добавочных сопротивлениях имеют невысокую жесткость.
При введении в цепь ротора добавочных индуктивных сопротивлений, уменьшаются величины  и . Влияние добавочных сопротивлений, включенных в цепь статора
и . Влияние добавочных сопротивлений, включенных в цепь статора  , аналогично влиянию добавочных индуктивностей (рис. 2.16б).
, аналогично влиянию добавочных индуктивностей (рис. 2.16б).
В пределах рабочего участка механической характеристики асинхронной машины, когда ток статора существенно не превышает номинальное значение, ЭДС двигателя E незначительно отличается от напряжения сети:
 .
.
Из этого выражения следует, что при  изменение напряжения приводит к изменению потока машины. Так как в номинальном режиме магнитная цепь машины насыщена, то повышение напряжения питания даже на 20-30% может увеличить ток холостого хода машины до значений, превышающих номинальный ток
изменение напряжения приводит к изменению потока машины. Так как в номинальном режиме магнитная цепь машины насыщена, то повышение напряжения питания даже на 20-30% может увеличить ток холостого хода машины до значений, превышающих номинальный ток  , и двигатель может нагреться выше нормы даже при отсутствии полезной нагрузки на его валу. Снижение напряжения питания приводит к уменьшению магнитного потока. Форма механических характеристик асинхронной машины при
, и двигатель может нагреться выше нормы даже при отсутствии полезной нагрузки на его валу. Снижение напряжения питания приводит к уменьшению магнитного потока. Форма механических характеристик асинхронной машины при  ,
,  (рис. 2.16в) говорит о том, что пропорционален квадрату приложенного напряжения, а
(рис. 2.16в) говорит о том, что пропорционален квадрату приложенного напряжения, а  .
.
При  ,
,  изменение частоты питающего напряжения приводит к пропорциональному изменению величины
изменение частоты питающего напряжения приводит к пропорциональному изменению величины  . Так как , то обратно пропорционален частоте . В номинальном режиме машина насыщена при
. Так как , то обратно пропорционален частоте . В номинальном режиме машина насыщена при  , поэтому допустимо только увеличение частоты
, поэтому допустимо только увеличение частоты  , что вызывает соответствующее уменьшение потока . В соответствии с выражением
, что вызывает соответствующее уменьшение потока . В соответствии с выражением
увеличение приводит к уменьшению критического момента. Критическое скольжение при этом также уменьшается, а скорость холостого хода увеличивается.
При необходимости уменьшения частоты  для снижения скорости
для снижения скорости  необходимо дополнительно изменить напряжение питания так, чтобы поток поддерживался примерно постоянным.
необходимо дополнительно изменить напряжение питания так, чтобы поток поддерживался примерно постоянным.
Устойчивость работы электродвигателя – способность двигателя восстанавливать установившуюся скорость вращения при небольших кратковременных возмущающих воздействиях (по питающей сети, по моменту нагрузки).
Условие равновесия моментов, приложенных к ротору двигателя:
 , (2.23)
, (2.23)
где
- электромагнитный момент двигателя;
 - статический момент нагрузки (с учетом механических потерь в двигателе);
- статический момент нагрузки (с учетом механических потерь в двигателе);
 - динамический момент, зависящий от момента инерции вращающихся масс
- динамический момент, зависящий от момента инерции вращающихся масс  и ускорения ротора
и ускорения ротора  .
.
В статике  , ускорение ротора
, ускорение ротора  , т. е. ротор вращается с установившейся скоростью. При
, т. е. ротор вращается с установившейся скоростью. При  вращение ротора ускоряется, а при
вращение ротора ускоряется, а при  - замедляется.
- замедляется.
Условие имеет место при двух величинах скольжения  и
и  , соответственно в точках A и B (рис. 2.17).
, соответственно в точках A и B (рис. 2.17).

Рис. 2.17. К устойчивости работы асинхронного двигателя.
При малейшем изменении момента нагрузки и появляющемся в результате этого отклонения скорости вращения от установившегося значения появляется избыточный замедляющий или ускоряющий момент  , увеличивающий это отклонение. При случайном увеличении статического момента ротор двигателя замедляется и скольжение возрастает. Так как точка B соответствует ниспадающему участку механической характеристики, то при этом момент двигателя также уменьшается, что приведет к еще большему увеличению модуля разности
, увеличивающий это отклонение. При случайном увеличении статического момента ротор двигателя замедляется и скольжение возрастает. Так как точка B соответствует ниспадающему участку механической характеристики, то при этом момент двигателя также уменьшается, что приведет к еще большему увеличению модуля разности  и увеличению скольжения. Этот процесс будет протекать до полной остановки двигателя. При случайном уменьшении статического момента ротор ускоряется, скольжение уменьшается. Момент двигателя вследствие уменьшения скольжения возрастает, что приводит к увеличению разности , а значит и к дальнейшему снижению скольжения. Этот процесс будет продолжаться до тех пор, пока машина не перейдет в режим работы, соответствующий точке A. В этой точке режим работы машины устойчив, так как случайное увеличение и замедление ротора (увеличение скольжения) приведет к возрастанию момента и уменьшению модуля разности
и увеличению скольжения. Этот процесс будет протекать до полной остановки двигателя. При случайном уменьшении статического момента ротор ускоряется, скольжение уменьшается. Момент двигателя вследствие уменьшения скольжения возрастает, что приводит к увеличению разности , а значит и к дальнейшему снижению скольжения. Этот процесс будет продолжаться до тех пор, пока машина не перейдет в режим работы, соответствующий точке A. В этой точке режим работы машины устойчив, так как случайное увеличение и замедление ротора (увеличение скольжения) приведет к возрастанию момента и уменьшению модуля разности  . Наоборот, случайное уменьшение статического момента и ускорение ротора (уменьшение скольжения) приведет к уменьшению модуля разности . В результате разность, в обоих случаях, начнет уменьшаться и когда момент станет равным , двигатель снова будет работать с установившейся скоростью. Условие устойчивой работы асинхронного двигателя:
. Наоборот, случайное уменьшение статического момента и ускорение ротора (уменьшение скольжения) приведет к уменьшению модуля разности . В результате разность, в обоих случаях, начнет уменьшаться и когда момент станет равным , двигатель снова будет работать с установившейся скоростью. Условие устойчивой работы асинхронного двигателя:
 . (2.24)
. (2.24)
Это условие выполняется для всех практически встречающихся механизмов, если двигатель работает на участке OM механической характеристики. Следовательно, двигатель может работать устойчиво только в диапазоне скольжений ротора  . Для расширения диапазона устойчивой работы точку M механической характеристики асинхронной машины
. Для расширения диапазона устойчивой работы точку M механической характеристики асинхронной машины  надо сдвигать вправо. Это можно осуществить в случае применения двигателя с фазовым ротором включением в цепь ротора дополнительного активного сопротивления
надо сдвигать вправо. Это можно осуществить в случае применения двигателя с фазовым ротором включением в цепь ротора дополнительного активного сопротивления  .
.
Приведенное выше условие является необходимым, но недостаточным. Когда двигатель работает при скольжении, меньшем  , но близком к нему, случайная перегрузка двигателя может привести к его остановке, если на краткое (или длительное) время
, но близком к нему, случайная перегрузка двигателя может привести к его остановке, если на краткое (или длительное) время  . Поэтому максимальный момент иногда называют опрокидывающим моментом. Для того чтобы двигатель работал надежно, его номинальный режим выбирают таким, чтобы
. Поэтому максимальный момент иногда называют опрокидывающим моментом. Для того чтобы двигатель работал надежно, его номинальный режим выбирают таким, чтобы
 (2.25)
(2.25)
Так как величина момента пропорциональна квадрату питающего напряжения, то даже сравнительно небольшое изменение питающего напряжения может привести к существенному снижению  .
.
Характеристиками асинхронного двигателя называются зависимости скорости вращения (или скольжения ), момента на валу  , тока статора
, тока статора  , коэффициента полезного действия
, коэффициента полезного действия  и коэффициента мощности
и коэффициента мощности  , от полезной мощности
, от полезной мощности  при и . Характеристики определяются либо экспериментальным, либо расчетным (по схеме замещения) путями. Они строятся только для зоны устойчивой работы двигателя, т. е. от скольжения, равного нулю, до скольжения, превышающего номинальное на 10-20%. Перечисленные выше характеристики имеют вид (рис.2.18):
при и . Характеристики определяются либо экспериментальным, либо расчетным (по схеме замещения) путями. Они строятся только для зоны устойчивой работы двигателя, т. е. от скольжения, равного нулю, до скольжения, превышающего номинальное на 10-20%. Перечисленные выше характеристики имеют вид (рис.2.18):
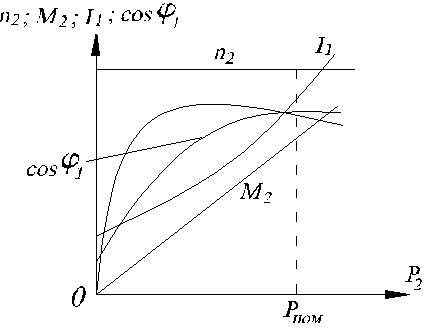
Рис. 2.18. Рабочие характеристики асинхронного двигателя.
Скорость вращения ротора в режиме полной нагрузки лишь на 2-8% меньше скорости холостого хода, т.к. при проектировании асинхронной машины с целью уменьшения потерь в обмотке ротора  стремятся снизить скольжение двигателя в номинальном режиме его работы до величины 0,02¸0,06. Следовательно, скоростная характеристика асинхронного двигателя является довольно “жесткой”.
стремятся снизить скольжение двигателя в номинальном режиме его работы до величины 0,02¸0,06. Следовательно, скоростная характеристика асинхронного двигателя является довольно “жесткой”.
Вращающий момент на валу машины определяется выражением  , где
, где  - угловая скорость вращения ротора. Так как изменяется незначительно (вследствие жесткости скоростной характеристики), то зависимость момента от мощности имеет практически линейный характер.
- угловая скорость вращения ротора. Так как изменяется незначительно (вследствие жесткости скоростной характеристики), то зависимость момента от мощности имеет практически линейный характер.
Момент несколько меньше электромагнитного момента :  , где
, где  - момент, обусловленный трением в двигателе.
- момент, обусловленный трением в двигателе.
Зависимость тока статора асинхронного двигателя от полезной мощности имеет примерно такой же характер, как в трансформаторе ток - статора зависит от тока нагрузки. Но величина тока холостого хода двигателя значительно больше, чем у трансформатора (20¸40% у асинхронного двигателя и 5-10% у трансформатора).
Зависимость коэффициента полезного действия асинхронного двигателя такая же, как и у трансформатора.
Коэффициент мощности асинхронного двигателя при переходе от режима холостого хода к режиму номинальной нагрузки возрастает от значения  ¸0,18 до некоторой максимальной величины, которая для двигателей малой мощности составляет 0,6¸0,85, а для двигателей средней и большой мощности 0,85¸0,92. При дальнейшем росте нагрузки несколько уменьшается.
¸0,18 до некоторой максимальной величины, которая для двигателей малой мощности составляет 0,6¸0,85, а для двигателей средней и большой мощности 0,85¸0,92. При дальнейшем росте нагрузки несколько уменьшается.
2.3.1. Пуск в ход асинхронных двигателей
Практически используются следующие способы пуска: непосредственное подключение обмотки статора к сети (прямой пуск); понижение напряжения, подводимого к двигателю при пуске; подключение к обмотке ротора пускового реостата.
Прямой пуск применяется для двигателей малой и средней мощности. Обычно при прямом пуске действующее значение пускового тока превосходит номинальное значение в четыре – шесть раз, а пусковой момент примерно равен:  ¸1,2)
¸1,2) .
.
Прямой пуск самый распространенный способ пуска в ход асинхронных двигателей. Недостатками его являются: большой пусковой ток и сравнительно малый пусковой момент, достоинство – простота.
Пуск асинхронного двигателя при пониженном напряжении применяют для двигателей большой мощности. Понижение напряжения может осуществляться тремя способами:
а) путем переключения обмотки статора при пуске с нормальной схемы “треугольник” на пусковую схему “звезда”. В этом случае фазовое напряжение уменьшается в  раз, что обуславливает уменьшение фазовых токов в раз и линейных токов в 3 раза. По окончании процесса пуска обмотку статора переключают на нормальную схему “треугольник”.
раз, что обуславливает уменьшение фазовых токов в раз и линейных токов в 3 раза. По окончании процесса пуска обмотку статора переключают на нормальную схему “треугольник”.
б) путем включения в цепь статора на период пуска добавочных активных или реактивных сопротивлений.
в) путем подключения двигателя к сети через понижающий автотрансформатор. Секции трансформатора в процессе пуска переключаются соответствующей аппаратурой.
Недостатком всех этих способов является значительное уменьшение пускового момента, который пропорционален квадрату приложенного напряжения. Поэтому пуск асинхронного двигателя при пониженном напряжении может применяться только при пуске двигателей без нагрузки.
Пуск с помощью пускового реостата применяется для двигателей с фазовым ротором. Этим способом можно осуществить пуск двигателя при  и резко уменьшить пусковой ток. Двигатели с фазовым ротором применяют только при тяжелых условиях пуска (когда необходимо развивать максимально возможный пусковой момент), при малой мощности электрической сети или при необходимости плавного регулирования скорости вращения.
и резко уменьшить пусковой ток. Двигатели с фазовым ротором применяют только при тяжелых условиях пуска (когда необходимо развивать максимально возможный пусковой момент), при малой мощности электрической сети или при необходимости плавного регулирования скорости вращения.
– Конец работы –
Эта тема принадлежит разделу:
Магнитные цепи с постоянной магнитодвижущей силой
На сайте allrefs.net читайте: "Магнитные цепи с постоянной магнитодвижущей силой"
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Асинхронная электрическая машина
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.029 сек.
Новости и инфо для студентов