рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Менеджмент
- /
- Исследование влияния нелинейности на работу двухмассовой системы.
Реферат Курсовая Конспект
Исследование влияния нелинейности на работу двухмассовой системы.
Исследование влияния нелинейности на работу двухмассовой системы. - раздел Менеджмент, КУРСОВАЯ РАБОТА По дисциплине: «Моделирование электропривода» На тему: «Моделирование и исследование систем подчиненного управления» Ранее Рассмотренные Варианты Настроек Одномассовой И Двухмассовой Систем Опер...
Ранее рассмотренные варианты настроек одномассовой и двухмассовой систем оперировали с линейными (линеаризованными) элементами в своей структуре. В данной главе оценим влияние нелинейных элементов на работу двухмассовой системы. Сравнение будем производить с двухмассовой системой с учётом упругости. В качестве нелинейных элементов выбирем:
1) Нелинейность типа люфт (выборка зазора)
Блок люфта Backlash
Назначение:
Моделирует нелинейность типа “люфт”.
Параметры:
1. Deaband width – Ширина люфта.
2. Initial output – Начальное значение выходного сигнала.
Сигнал на выходе будет равен заданному значению Initial output, пока входной сигнал при возрастании не достигнет значения (Deaband width)/2 (где U – входной сигнал), после чего выходной сигнал будет равен U-(Deaband width)/2. После того как, произойдет смена направления изменения входного сигнала, он будет оставаться неизменным, пока входной сигнал не изменится на величину (Deaband width)/2, после чего выходной сигнал будет равен U+(Deaband width)/2.
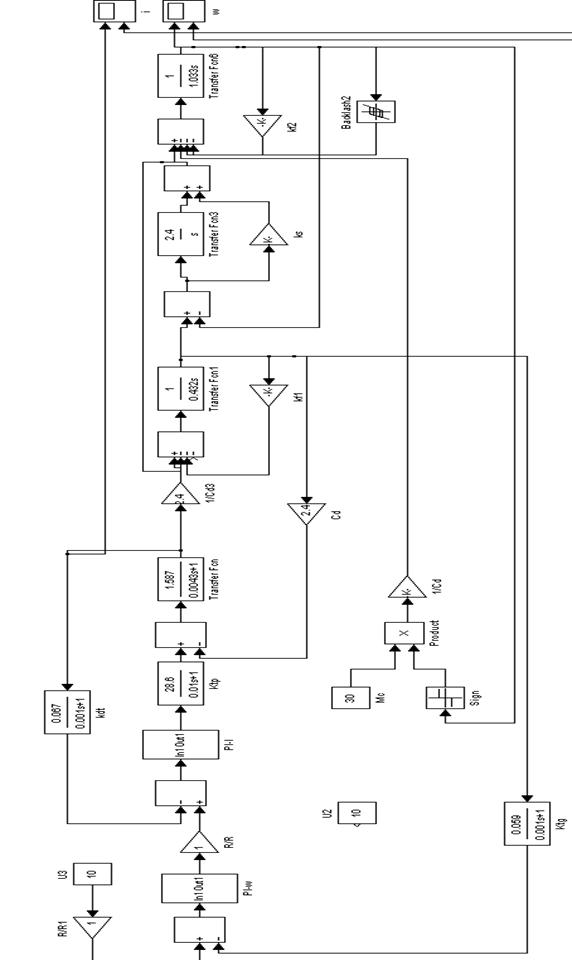

Рис.23 Графики переходного процесса тока при нелинейности типа люфт(вверху с нелинейностью, внизу- без)
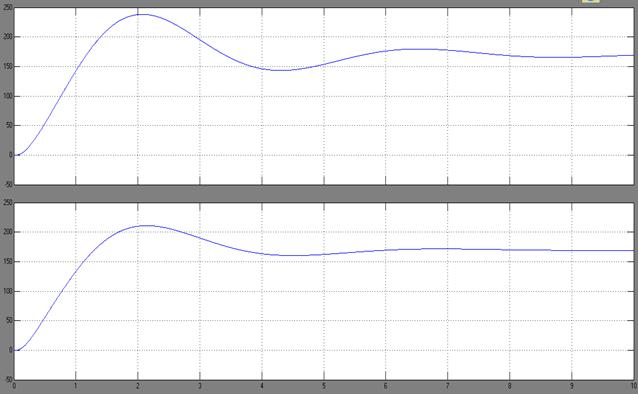
Рис.24 Графики переходного процесса скорости при нелинейности типа люфт(вверху с нелинейностью, внизу- без)

Рис.25 Настройки блока нелинейности люфт(выборка зазора)
2) Учёт вязкого и сухого трения
Блок сухого и вязкого трения Coulomb and Viscous Friction
Назначение:
Моделирует эффекты сухого и вязкого трения.
Параметры:
1. Coulomb friction value (Offset)– Величина сухого трения.
2. Coefficient of viscous friction (Gain) – Коэффициент вязкого трения.
Блок реализует нелинейную характеристику, соответствующую выражению:

где u – входной сигнал,
y – выходной сигнал,
Gain – коэффициент вязкого трения ,
Offset – Величина сухого трения.


Рис.27 Графики переходного процесса тока при нелинейности типа вязкое/сухое трение (вверху с нелинейностью, внизу- без)
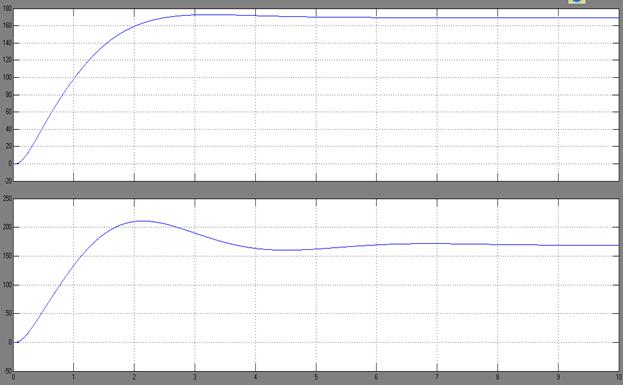
Рис.28 Графики переходного процесса скорости при нелинейности типа вязкое/сухое трение (вверху с нелинейностью, внизу- без)
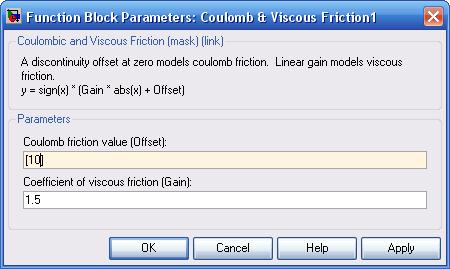
Рис.29 Настройки блока нелинейности вязкое/сухое трение
До сих пор мы считали, что передаточный механизм привода ( механизм преобразования движения) идеальный, т.е. не имеет сухого трения и зазора. Однако в реальных приводах влияние указанных факторов чаще всего приходится учитывать. В частности воздействие момента идеального сухого трения (Mст) можно представить как воздействие на рабочий орган релейного элемента, охватывающего его обратной связью. Последствия от воздействия момента сухого трения проявляются в виде: снижения точности, увеличения длительности переходных процессов и зависимости их характера от значения рассогласования, а в определенных случаях и возникновения автоколебаний, что было наглядно продемонстрированно на рис. 23, 24, 27,28.
Наличие зазора приводит к тому, что, пока зазор не выбран связь между двигателем и рабочим органом отсутствует, т.е. размыкается контур положения. Связь восстанавливается только после того, как зазор будет выбран. Это может привести к возникновению устойчивых автоколебаний.
Проведём компенсацию нелинейности, вызванной Мст трения. Т.к. значение Mст стабильно, то его влияние можно устранить, например, если на вход интегратора , соответствующего рабочему органу, ввести воздействие в виде момента m=Mстsignω, что соответствует охвату интегратора положительной обратной связью (реализуем это по схеме, аналогичной схеме на рис.26).

Рис.30 Компенсация вязкого/сухого трения, графики тока якоря

Рис.31 Компенсация вязкого/сухого трения, графики скорости конечной передачи
Если быстродействие контура регулирования тока достаточно высокое, то компенсацию сухого трения можно осуществить путем последовательного включения релейного элемента, моделирующего сухое трение, с обратным знаком. Тогда при появлении на выходе регулятора положения любого сколь угодно малого напряжения на вход регулятора тока параллельно с сигналом с регулятора скорости будет поступать постоянное напряжение компенсации сухого трения, знак которого зависит от знака сигнала с выхода РП. Сухое трение можно компенсировать и не полностью, все равно компенсация даст эффект, что продемонстрировано на рис.30, 31.
– Конец работы –
Эта тема принадлежит разделу:
КУРСОВАЯ РАБОТА По дисциплине: «Моделирование электропривода» На тему: «Моделирование и исследование систем подчиненного управления»
ГОУВПО ВОРОНЕЖСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ... ФАКУЛТЕТ АВТОМАТИКИ И ЭЛЕКТРОМЕХАНИКИ... КАФЕДРА ЭЛЕКТРОПРИВОДА И АВТОМАТИКИ В ТЕХНИЧЕСКИХ СИСТЕМАХ...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Исследование влияния нелинейности на работу двухмассовой системы.
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.016 сек.
Новости и инфо для студентов