рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Менеджмент
- /
- Контур тока якоря
Реферат Курсовая Конспект
Контур тока якоря
Контур тока якоря - раздел Менеджмент, КУРСОВАЯ РАБОТА По дисциплине: «Моделирование электропривода» На тему: «Моделирование и исследование систем подчиненного управления» ...
Рис.6 Структурная схема контура тока
В практике проектирования систем подчиненного управления электроприводами широкое применение находят стандартные настройки регулирования. Передаточная функция регулятора Wрег(p):
 (8.1)
(8.1)
Где  - коэффициент усиления регулятора;
- коэффициент усиления регулятора;
 - постоянная времени регулятора.
- постоянная времени регулятора.
 (8.2)
(8.2)
 (8.3)
(8.3)
где  - индуктивность якорной цепи;
- индуктивность якорной цепи;
 - сопротивление якорной цепи.
- сопротивление якорной цепи.
 (8.4)
(8.4)
где  - малая постоянная времени токового контура;
- малая постоянная времени токового контура;
 (8.5)
(8.5)
 – соответственно, постоянная времени датчика тока и тиристорного преобразователя.
– соответственно, постоянная времени датчика тока и тиристорного преобразователя.
 – соответственно, коэффициент усиления датчика тока и тиристорного преобразователя.
– соответственно, коэффициент усиления датчика тока и тиристорного преобразователя.
Согласно передаточной функции (6.1) составим, передаточная функция контура тока будет выглядеть следующим образом:
 (8.6)
(8.6)
Техническая реализация выражения (6.8) возможна при помощи схемы, представленной на рис.

|
Рис.7 Структурная схема реализации регулятора тока
Реализация контура тока в Matlab показана на рис.
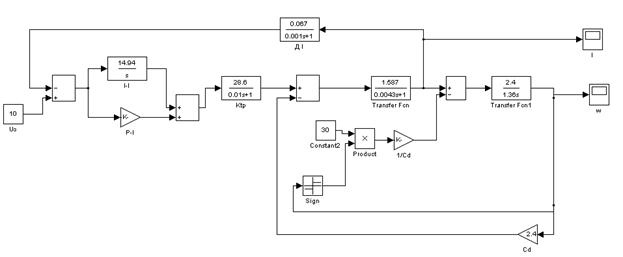
Рис.8 Реализация контура тока в Matlab

Рис.9 Переходная характеристика по току при настроике контура тока на модульный оптимум
Как видно из рисунка величина перерегулирования составляет 4,3%.
– Конец работы –
Эта тема принадлежит разделу:
КУРСОВАЯ РАБОТА По дисциплине: «Моделирование электропривода» На тему: «Моделирование и исследование систем подчиненного управления»
ГОУВПО ВОРОНЕЖСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ... ФАКУЛТЕТ АВТОМАТИКИ И ЭЛЕКТРОМЕХАНИКИ... КАФЕДРА ЭЛЕКТРОПРИВОДА И АВТОМАТИКИ В ТЕХНИЧЕСКИХ СИСТЕМАХ...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Контур тока якоря
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.015 сек.
Новости и инфо для студентов