рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Философия
- /
- Багатополюсні генератори.
Реферат Курсовая Конспект
Багатополюсні генератори.
Багатополюсні генератори. - раздел Философия, Конспект лекцій з дисципліни Електротехніка, електроніка та мікропроцесорна техніка Втеперішній Час На Теплових Електростанціях Застосовуються Головним Чином Дво...
Втеперішній час на теплових електростанціях застосовуються головним чином двополюсні турбогенератори із швидкістю обертання n = 3000 об./хв. При двополюсному роторі один повний цикл синусоїдальної ЕРС відповідає одному оберту ротора. Якщо швидкість обертання ротора n = 3000 об./хв., то частота 
Прагнення до використання швидкохідних машин, працюючих з граничною швидкістю n = 3000 об./хв., пояснюється тим, що із збільшенням швидкості меншають вага і вартість турбогенератора. Що стосується гідравлічних турбін і пов’язаних з ними генераторів, то швидкість їх обертання в основному визначається висотою натиску води і звичайно коливається в діапазоні від 50 об./хв. для низьконапірних електростанцій до 750 об./хв. для високонапірних електростанцій.
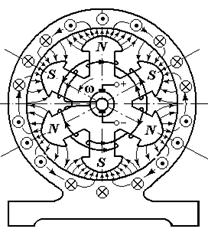 Для отримання змінного струму стандартної частоти тихохідні генератори виконують багатополюсними. Котушки електромагнітів ротора сполучаються між собою так, що північні і південні полюси чергуються.
Для отримання змінного струму стандартної частоти тихохідні генератори виконують багатополюсними. Котушки електромагнітів ротора сполучаються між собою так, що північні і південні полюси чергуються.
Повороту ротора на кут, рівний  , відповідає один повний період синусоїдальної ЕРС, що наводиться в статорі. Якщо машина, що має р пар полюсів, здійснює п оборотів за хвилину, то частота
, відповідає один повний період синусоїдальної ЕРС, що наводиться в статорі. Якщо машина, що має р пар полюсів, здійснює п оборотів за хвилину, то частота  .
.
Трифазна обмотка статора генератора змінного струму виконується аналогічно статорній обмотці асинхронного двигуна. Число пар полюсів статора завжди дорівнює числу пар полюсів ротора.
Три синусоїдальні ЕРС, що індукуються в обмотці статора, рівні по величині і взаємно зсунуті по фазі на третину періоду. Якщо до клем генератора приєднане симетричне трифазне навантаження, то по обмотці статора протікають три синусоїдальних струми однакової величини, також зсунутих по фазі відносно один одного на третину періоду. Струм кожної фази створює змінний магнітний потік, вісь якого співпадає з віссю обмотки цієї фази. Магнітні лінії змінних потоків трьох фаз утворять (як і в асинхронній машині) магнітне поле, що обертається з швидкістю  .
.
Підставивши сюди значення f з попереднього виразу, отримуємо  . Ротор і магнітне поле статора обертаються з однаковою швидкістю, тобто синхронно. В зв'язку з цим електричні машини, що розглядаються отримали назву синхронних.
. Ротор і магнітне поле статора обертаються з однаковою швидкістю, тобто синхронно. В зв'язку з цим електричні машини, що розглядаються отримали назву синхронних.
Робочий процес синхронного генератора
Холостий хід.
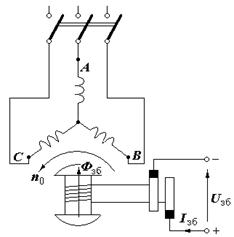 При холостому ході, коли обмотка якоря розімкнена, магнітне поле машини створюється тільки обмоткою збудження. Оскільки ЕРС Е0, що наводиться в обмотці якоря, змінюється у часі згідно із законом синуса, то потік збудження Фзб і індуковану ним ЕРС Е0 можна зображати за допомогою векторів. Діюче значення фазної ЕРС визначається за формулою
При холостому ході, коли обмотка якоря розімкнена, магнітне поле машини створюється тільки обмоткою збудження. Оскільки ЕРС Е0, що наводиться в обмотці якоря, змінюється у часі згідно із законом синуса, то потік збудження Фзб і індуковану ним ЕРС Е0 можна зображати за допомогою векторів. Діюче значення фазної ЕРС визначається за формулою

де k – обмотувальний коефіцієнт;
w – число витків однієї фази обмотки статора;
с – коефіцієнт, постійний для даної машини.
При постійній швидкості обертання ротора і відсутності навантаження, тобто при режимі холостого ходу, ЕРС генератора залежить тільки від магнітного потоку Фзб, а отже, тільки від струму збудження Ізб. Змінюючи напругу Uзб на клемах обмотки збудження, можна змінювати струм збудження і тим самим регулювати магнітний потік Фзб і ЕРС Е0 генератора. На мал. представлена залежність ЕРС генератора від струму збудження Е0(Ізб) при номінальній швидкості обертання  . Ця залежність називається характеристикою холостого ходу. Форма характеристики, що нагадує форму кривої намагнічування, обумовлена явищем насичення магнітної системи (відсутністю пропорціональності між магнітним потоком Фзб і струмом збудження Ізб).
. Ця залежність називається характеристикою холостого ходу. Форма характеристики, що нагадує форму кривої намагнічування, обумовлена явищем насичення магнітної системи (відсутністю пропорціональності між магнітним потоком Фзб і струмом збудження Ізб).
 Надалі для простоти будемо розглядати процеси, що відбуваються в двополюсних синхронних машинах з циліндричним ротором[5] і ненасиченою магнітною системою, тобто будемо вважати, що Е0 пропорційна струму збудження машини.
Надалі для простоти будемо розглядати процеси, що відбуваються в двополюсних синхронних машинах з циліндричним ротором[5] і ненасиченою магнітною системою, тобто будемо вважати, що Е0 пропорційна струму збудження машини.
Реакція якоря.
У навантаженому генераторі синусоїдальні струми, що протікають в трифазній обмотці статора, утворять при постійному навантаженні незмінний по величині магнітний потік ФЯ, що обертається синхронно з потоком ротора Фзб.
Так само, як в асинхронній машині, три нерухомі обмотки статора, по яких протікає трифазний струм, по своїй дії еквівалентні постійній намагнічуючій силі, що обертається в просторі з швидкістю n0. Отже, на відміну від режиму холостого ходу, в навантаженій синхронній машині при незмінному струмі збудження і постійному навантаженні одночасно діють дві постійні по величині намагнічуючі сили (НС): НС обмотки збудження Fзб і НС обмотки якоря FЯ. Ці сили, що намагнічують створюють результуючу НС – FРЕЗ, яка визначає реально існуючий в машині загальний магнітний потік Ф. Цей потік, що обертається з синхронною швидкістю n0, індукує в нерухомій обмотці якоря синусоїдальну ЕРС ЕРЕЗ (в обмотці ротора магнітний потік не індукує ЕРС).
Для аналізу процесів, що відбуваються в навантаженій синхронній машині, зручно вважати, що кожна з намагнічуючих сил Fзб і FЯ створює свій магнітний потік, що індукує ЕРС в обмотці якоря.
Дія НС обмотки якоря на основний магнітний потік і загалом на режим роботи навантаженої машини називають реакцією якоря.
 Щоб визначити вплив НС якоря FЯ на основний магнітний потік машини, необхідно знайти взаємне розташування осей потоків ФЯ і Фзб при різних характерах навантаження генератора. При цьому потрібно врахувати, що ЕРС, що індукується потоком Фзб в однієї з фаз обмотки статора, досягає максимуму в той момент, коли провідники цієї фази знаходяться під серединою полюса ротора (рис. а).
Щоб визначити вплив НС якоря FЯ на основний магнітний потік машини, необхідно знайти взаємне розташування осей потоків ФЯ і Фзб при різних характерах навантаження генератора. При цьому потрібно врахувати, що ЕРС, що індукується потоком Фзб в однієї з фаз обмотки статора, досягає максимуму в той момент, коли провідники цієї фази знаходяться під серединою полюса ротора (рис. а).
Вісь потоку якоря ФЯ, як відомо, співпадає з віссю обмотки тієї фази, де струм І досягає максимуму. Тому при аналізі зручно визначити взаємне розташування осей потоків Фзб і ФЯ в момент часу, коли струм в якій-небудь з фаз статора (наприклад, АХ) досягає максимального значення.
 При чисто індуктивному навантаженні струм
При чисто індуктивному навантаженні струм  відстає по фазі від ЕРС
відстає по фазі від ЕРС  на чверть періоду (y= + 90°) і досягає максимуму (Іm) в момент, коли полюс N ротора піде уперед на чверть оберту (рис. б) від положення, вказаного на рис. а. В цьому випадку потік якоря ФЯ направлений проти потоку ротора Фзб і, отже, чинить на нього розмагнічуючу дію.
на чверть періоду (y= + 90°) і досягає максимуму (Іm) в момент, коли полюс N ротора піде уперед на чверть оберту (рис. б) від положення, вказаного на рис. а. В цьому випадку потік якоря ФЯ направлений проти потоку ротора Фзб і, отже, чинить на нього розмагнічуючу дію.
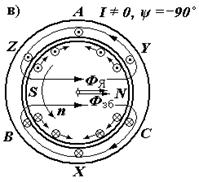 При чисто ємкісному навантаженні струм випереджає по фазі ЕРС
При чисто ємкісному навантаженні струм випереджає по фазі ЕРС  на чверть періоду (y= – 90°) і досягає максимального значення (Іm), коли полюс N ротора не доходить на 90° (рис. в) до положення, вказаного на рис. а. В цьому випадку потік якоря ФЯ співпадає по напрямку з потоком ротора ФВ тобто чинить на нього намагнічуючу дію.
на чверть періоду (y= – 90°) і досягає максимального значення (Іm), коли полюс N ротора не доходить на 90° (рис. в) до положення, вказаного на рис. а. В цьому випадку потік якоря ФЯ співпадає по напрямку з потоком ротора ФВ тобто чинить на нього намагнічуючу дію.
 Як при чисто індуктивному, так і при чисто ємкісному навантаженню взаємодія провідників ротора з магнітним потоком статора не створює гальмівного моменту на валу машини, незважаючи на те, що на кожного провідника ротора діє електромагнітна сила (рис. б і в). Це пояснюється тим, що електромагнітні сили, що діють за годинниковою стрілкою, урівноважуються протилежно направленими електромагнітними силами (в цьому можна пересвідчитися, застосувавши правило лівої руки до всіх провідників обмотки ротора)[6]. Потужність, що витрачається первинним двигуном при чисто реактивному навантаженні, мала і визначається тільки втратами в генераторі.
Як при чисто індуктивному, так і при чисто ємкісному навантаженню взаємодія провідників ротора з магнітним потоком статора не створює гальмівного моменту на валу машини, незважаючи на те, що на кожного провідника ротора діє електромагнітна сила (рис. б і в). Це пояснюється тим, що електромагнітні сили, що діють за годинниковою стрілкою, урівноважуються протилежно направленими електромагнітними силами (в цьому можна пересвідчитися, застосувавши правило лівої руки до всіх провідників обмотки ротора)[6]. Потужність, що витрачається первинним двигуном при чисто реактивному навантаженні, мала і визначається тільки втратами в генераторі.
Якщо струм співпадає за фазою з ЕРС  , то він досягає максимуму в момент, коли вісь поля ротора співпадає з плоскістю АХ (рис. г). Електромагнітні сили, що діють на всі провідники обмотки ротора, виявляються узгодженими і спільно створюють гальмівний момент, що долається первинним двигуном генератора.
, то він досягає максимуму в момент, коли вісь поля ротора співпадає з плоскістю АХ (рис. г). Електромагнітні сили, що діють на всі провідники обмотки ротора, виявляються узгодженими і спільно створюють гальмівний момент, що долається первинним двигуном генератора.
Вище були розглянуті граничні випадки, коли струм і ЕРС  або співпадають за фазою, або були зсунуті на кут y= ± 90°. В практичних умовах струм якоря відстає за фазою від ЕРС
або співпадають за фазою, або були зсунуті на кут y= ± 90°. В практичних умовах струм якоря відстає за фазою від ЕРС  на кут y(0 < y <90°). Тут струм можна розглядати як такий, що складається з двох складових: 1) активної складової I·cos y, що зумовлює механічну реакцію в вигляді електромагнітного гальмівного моменту на валу, 2) реактивної складової I·sin y, що спричиняє магнітну реакцію, тобто що послаблює основний магнітний потік машини.
на кут y(0 < y <90°). Тут струм можна розглядати як такий, що складається з двох складових: 1) активної складової I·cos y, що зумовлює механічну реакцію в вигляді електромагнітного гальмівного моменту на валу, 2) реактивної складової I·sin y, що спричиняє магнітну реакцію, тобто що послаблює основний магнітний потік машини.
Зовнішня і регулювальна характеристики.
ЕРС  і напруга
і напруга  на клемах генератора при навантаженому режимі істотно відрізняється за величиною. Практичний інтерес уявляє зміна напруги при змішаному (активно-індуктивному) навантаженні генератора. На рис. (а) показані зовнішні характеристики синхронного генератора U(I) при різних значеннях соs j (ці характеристики можна побудувати по розрахунковим даним, виходячи з векторної діаграми, або по результатам випробувань). Зниження напруги U при збільшенні навантажувального струму спричиняється головним чином розмагнічуючим впливом реакції якоря; воно тим значніше, чим нижче соs j інд[7].
на клемах генератора при навантаженому режимі істотно відрізняється за величиною. Практичний інтерес уявляє зміна напруги при змішаному (активно-індуктивному) навантаженні генератора. На рис. (а) показані зовнішні характеристики синхронного генератора U(I) при різних значеннях соs j (ці характеристики можна побудувати по розрахунковим даним, виходячи з векторної діаграми, або по результатам випробувань). Зниження напруги U при збільшенні навантажувального струму спричиняється головним чином розмагнічуючим впливом реакції якоря; воно тим значніше, чим нижче соs j інд[7].
 Зовнішні (а) і регулювальні (б) характеристики синхронного генератора:
Зовнішні (а) і регулювальні (б) характеристики синхронного генератора:
Для підтримки напруги U на певному рівні необхідно регулювати струм збудження. Чим більший навантажувальний струм і нижче соs jінд навантаження, тим більше повинен бути струм збудження Iзб. Залежність струму збудження від струму навантаження I при незмінній напрузі (U = const)називається регулювальною характеристикою.
На рис. (б) представлені регулювальні характеристики синхронного генератора, відповідні трьом різним значенням соs j.Заданий рівень напруги у сучасних генераторів підтримується автоматично регуляторами напруги (АРН).
Коефіцієнт корисної дії синхронних генераторів має високі номінальні значення, а саме 91 – 99 %.
Синхронний двигун
Як відомо, електрична машина може перетворювати механічну енергію в електричну, тобто працювати як генератор, або, навпаки, електричну енергію – в механічну, тобто працювати як двигун. Ця властивість електричних машин називається оборотністю.
Вище ми бачили, що синхронний генератор, що працює паралельно з іншими генераторами, віддає в загальну мережу активну потужність, що виробляється ним. Нарівні з цим генератор може в залежність від величини струму збудження віддавати в мережу реактивну потужність (прийнявши на себе частину індуктивного навантаження системи) або отримувати від мережі реактивну потужність (тим самим збільшивши індуктивне навантаження, яке повинні прийняти на себе інші генератори).
Надалі ми побачимо, що синхронна машина, працюючи в режимі двигуна, подібно асинхронному двигуну споживає з мережі активну потужність відповідно до величини механічного навантаження на її валу. Що стосується реактивної потужності, то вона може бути індуктивною (при недозбуждені) або ємнісною (при перезбуждені).
У останньому випадку синхронний двигун приймає на себе частину індуктивного навантаження системи і виконує, як прийнято говорити, роль генератора реактивної потужності або фазокомпенсатора.
Принцип роботи синхронного двигуна.
 Більшість синхронних двигунів виготовляється на швидкості обертання 1500, 1000, 750, 600 об/хв і менш. У цих двигунів ротор виконується з явно вираженими полюсами і обмоткою збудження, що живиться від джерела постійного струму. Трифазна обмотка статора, як і у асинхронного двигуна, приєднується до мережі живлення трифазним змінним струмом.
Більшість синхронних двигунів виготовляється на швидкості обертання 1500, 1000, 750, 600 об/хв і менш. У цих двигунів ротор виконується з явно вираженими полюсами і обмоткою збудження, що живиться від джерела постійного струму. Трифазна обмотка статора, як і у асинхронного двигуна, приєднується до мережі живлення трифазним змінним струмом.
Для з’ясування принципу дії синхронного двигуна звернемося до моделі, зображеної на мал. Магнітне поле, створене трифазним струмом, що протікає по обмотках статора, представлене у вигляді двох полюсів N'і S'постійного магніту, що обертається з незмінною швидкістю n0. Ротор також зображений у вигляді постійного магніту з полюсами N і S. Обидві магнітні системи зовнішня і внутрішня, розділені повітряним зазором, можуть обертатися навколо осі.
Якщо обмотку збудження двигуна приєднати до джерела постійного струму, а обмотку статора підключити до трифазної мережі, то магнітне поле статора почне обертатися з постійною швидкістю навколо нерухомого ротора, причому ця швидкість практично встановлюється миттєво. Припустимо, що n0 = 3000 об./хв.; це означає, що протягом секунди мимо кожного полюса ротора буде проходити по 50 раз полюс N'іполюс S'обертовогополя статора. Отже, на ротор будуть діяти сили, направлені то в одну, то в іншу сторону; середнє значення моменту сил дорівнює нулю. У результаті ротор, що має певний моментом інерції, не зрушиться з місця.
 Якщо будь–яким способом заздалегідь розігнати ротор до синхронної швидкості, то сили взаємодії полюсів ротора N – S з полюсами N' – S' поля статора, що обертається, забезпечать обертання ротора з швидкістю поля n0.
Якщо будь–яким способом заздалегідь розігнати ротор до синхронної швидкості, то сили взаємодії полюсів ротора N – S з полюсами N' – S' поля статора, що обертається, забезпечать обертання ротора з швидкістю поля n0.
У режимі ідеального холостого ходу (момент опору Моп = 0) осі обох магнітних систем співпадають (рис. а). На полюси ротора діють радіальні сили F1 і F2, які не створюють ні обертаючого моменту, ні моменту опору.
Якщо до вала двигуна прикласти механічне навантаження, що створює момент опору Моп, то вісь ротора зміститься назад (відносно осі полюсів поля, що обертається ) на кут q, який залежить від величини моменту Моп. На полюси ротора тепер діятимуть сили тяжіння F1 і F2, тангенціальні складові яких F1t і F2t створюють обертаючий момент М = Моп, який долає момент опору механічного навантаження (мал. б)
 Залежність M(q) при Е0 = const (тобто при незмінному струмі збудження) називається кутовою характеристикою синхронного двигуна.
Залежність M(q) при Е0 = const (тобто при незмінному струмі збудження) називається кутовою характеристикою синхронного двигуна.
Стійка робота синхронного двигуна можлива, коли при збільшенні моменту опору Моп і відповідному зростанні кута q електромагнітний обертаючий момент також збільшується, тобто коли  . Отже, при зміні q від 0° до 90° робота двигуна буде стійкою. При q³ 90° робота двигуна неможлива, оскільки при цьому збільшення механічного навантаження на валу двигуна супроводжується зменшенням обертаючого моменту.
. Отже, при зміні q від 0° до 90° робота двигуна буде стійкою. При q³ 90° робота двигуна неможлива, оскільки при цьому збільшення механічного навантаження на валу двигуна супроводжується зменшенням обертаючого моменту.
При роботі двигуна з номінальним навантаженням і номінальним струмом збудження кут q звичайно не перевищує 25° – З0°. При цих значеннях кута q відношення максимальною моменту до номінального, що визначає короткочасну перевантажувальну здатність синхронною двигуна, дорівнює
– Конец работы –
Эта тема принадлежит разделу:
Конспект лекцій з дисципліни Електротехніка, електроніка та мікропроцесорна техніка
ХЕРСОНСЬКИЙ НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ... Кафедра енергетики та електротехніки...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Багатополюсні генератори.
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.028 сек.
Новости и инфо для студентов