рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Философия
- /
- Складання розрахункової системи методу переміщень
Реферат Курсовая Конспект
Складання розрахункової системи методу переміщень
Складання розрахункової системи методу переміщень - раздел Философия, РОЗДІЛУ БУДІВЕЛЬНОЇ МЕХАНІКИ МЕТОД ПЕРЕМІЩЕНЬ В СТАТИЦІ СТЕРЖНЕВИХ СИСТЕМ 2.4.1 Вузли Розрахункової Схеми При Склада...
2.4.1 Вузли розрахункової схеми
При складанні розрахункової схеми необхідно намітити вузлові точки, для яких будуть визначатися переміщення.
Під вузловими точками будемо розуміти границі ділянок - злами осі, місця зміни розмірів поперечного переріза, перерізи, у яких є шарніри або опорні в'язі, а також будь-який інший переріз конструкції, у якому необхідно визначити переміщення й зусилля, наприклад, точки прикладення зовнішніх силових факторів.
Зручно розрізняти рамні вузли й вузли ферми. Вузол, у якому з'єднуються стержні, що працюють на вигин, будемо називати рамним. Вузол, у якому з'єднуються стержні, що працюють тільки на розтягання (стиск), будемо називати вузлом ферми. Іноді в одній точці одночасно з'єднуються рамні вузли та вузли ферми.
При розрахунку плоскої стержневої системи для рамного вузла необхідно визначити кут повороту й компоненти лінійного переміщення вузла, для вузла ферми - тільки компоненти лінійного переміщення вузла.
2.4.2 Про приведення заданого навантаження до вузлових зосереджених сил і моментів.
При розрахунку стержневих систем “вручну” основні труднощі полягають у складанні й рішенні системи алгебраїчних рівнянь для визначення основних невідомих. Тому при розрахунку стержневих систем “вручну” варто призначати якнайменше вузлів. Для зменшення числа невідомих рекомендується розрахувати окремо стержень, затиснений у вузлах, на дію прикладеного навантаження, і одержати значення кінцевих моментів і сил, які являють собою навантаження на вузол з боку завантаженого стержня.
При використанні ЕОМ немає необхідності скорочувати число розшукуваних невідомих шляхом обчислення навантаження на вузол з боку завантаженого стержня. У перерізах, де прикладені зосереджені силові фактори – сила, момент, - можна ввести додаткові вузли. Якщо до стержня прикладене розподілене навантаження, його рекомендується замінити системою зосереджених сил, а в точках прикладення цих сил призначити вузли. Тоді для цих вузлів у результаті розрахунку буде отримана інформація про переміщення й зусилля.
2.4.3 Урахування симетрії конструкції.
Якщо необхідно розрахувати симетричну конструкцію на симетричне або кососиметричне навантаження, то обсяг обчислювальної роботи можна істотно скоротити, якщо розраховувати “еквівалентну” половину.
Розглянемо кілька характерних прикладів вибору “еквівалентної” половини.
2.4.3.1 Симетрична рама під дією симетричного навантаження.
Симетрична рама, яка знаходиться під дією симетричного навантаження, має симетричну деформовану схему. У цьому випадку епюри згинальних моментів і поздовжніх сил прямо симетричні, а епюра поперечних сил - кососиметрична, тобто в перерізі на осі симетрії поперечна сила дорівнює нулю. Переріз на осі симетрії не зміщується перпендикулярно осі симетрії й не повертається, а може вільно переміщатися уздовж осі симетрії. “Еквівалентна” половина рами показана на рисунку 2.3. У перерізі на осі симетрії - ковзне закладення (повзун), що дозволяє перерізу на осі симетрії вільно переміщатися уздовж осі симетрії.
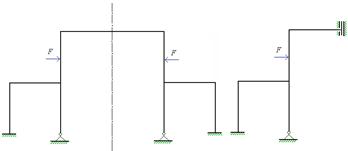
Рисунок 2.3 - Симетрична рама під дією симетричного навантаження та її “еквівалентна” половина.
2.4.3.2 Симетрична рама під дією кососиметричного навантаження.
Симетрична рама, яка знаходиться під дією кососиметричного навантаження, має кососиметричну деформовану схему. У цьому випадку епюра згинальних моментів і поздовжніх сил будуть кососиметричними, а епюра поперечних сил - симетрична, тобто в перерізі на осі симетрії згинальний момент і поздовжня сила дорівнюють нулю. Переріз на осі симетрії в цьому випадку може вільно повертатися й переміщатися перпендикулярно осі симетрії, але не може переміщатися уздовж осі симетрії. “Еквівалентна” половина рами для цього випадку показана на рисунку 2.4. У перерізі на осі симетрії необхідно поставити в'язь, що перешкоджає переміщенню уздовж осі симетрії.
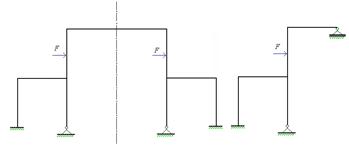
Рисунок 2.4 - Симетрична рама під дією кососиметричного навантаження та її
“еквівалентна” половина.
2.4.3.3 Симетрична рама із шарніром на осі симетрії під дією симетричного навантаження
У такому випадку переріз на осі симетрії може вільно повертатися, але не може переміщатися перпендикулярно осі симетрії. “Еквівалентна” половина рами для цього випадку показана на рисунку 2.5.

Рисунок 2.5 - Симетрична рама із шарніром на осі симетрії під дією симетричного навантаження та її “еквівалентна” половина.
2.4.3.4 Симетрична рама із шарніром на осі симетрії під дією кососиметричного навантаження
У цьому випадку робота конструкції нічим не відрізняється від випадку, описаного в пункті 1.4.3.2, тому “еквівалентна” половина рами закріплюється так само (рисунок 2.6).
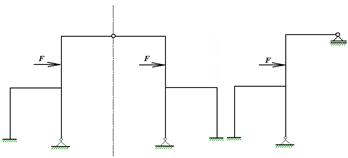
Рисунок 2.6 - Симетрична рама із шарніром на осі симетрії під дією кососиметричного
навантаження та її “еквівалентна” половина.
2.4.3.5 На осі симетрії є стержень, який деформується
Розрахункові схеми й відповідні “еквівалентні“ половини для симетричного й кососиметричного навантажень показані на рисунках 2.7 – 2.10.

Рисунок 2.7- Симетрична рама зі стержнем, що деформується, на осі симетрії під дією симетричного
навантаження та її “еквівалентна” половина.

Рисунок 2.8 - Симетрична рама зі стержнем, що деформується, на осі симетрії під дією
кососиметричного навантаження та її “еквівалентна” половина.
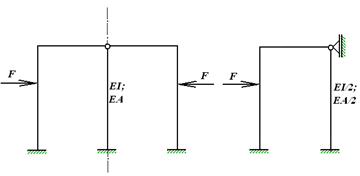
Рисунок 2.9 - Симетрична рама із шарніром на осі симетрії та зі стержнем, що деформується, під
дією симетричного навантаження та її “еквівалентна” половина.
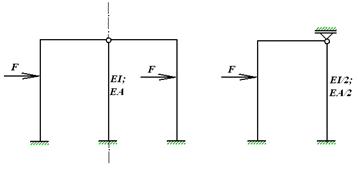
Рисунок 2.10 - Симетрична рама із шарніром на осі симетрії та зі стержнем, що деформується,
під дією кососиметричного навантаження та її “еквівалентна” половина.
2.4.3.6 На осі симетрії є в'язь, яка не деформується
На рисунках 2.11 й 2.12 показані розрахункові схеми й відповідні “еквівалентні“ половини для випадків, коли на осі симетрії є в’язь, яка не деформується.
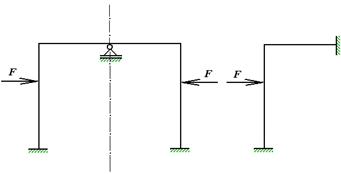
Рисунок 2.11 - Симетрична рама під дією симетричного навантаження та її “еквівалентна”
половина у випадку, коли на осі симетрії є в'язь, яка не деформується.
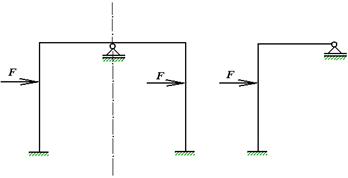
Рисунок 2.12 - Симетрична рама під дією кососиметричного навантаження та її “еквівалентна”
половина у випадку, коли на осі симетрії є в'язь, яка не деформується.
– Конец работы –
Эта тема принадлежит разделу:
РОЗДІЛУ БУДІВЕЛЬНОЇ МЕХАНІКИ МЕТОД ПЕРЕМІЩЕНЬ В СТАТИЦІ СТЕРЖНЕВИХ СИСТЕМ
НАВЧАЛЬНО МЕТОДИЧНИЙ КОМПЛЕКС РОЗДІЛУ БУДІВЕЛЬНОЇ МЕХАНІКИ МЕТОД ПЕРЕМІЩЕНЬ В СТАТИЦІ СТЕРЖНЕВИХ СИСТЕМ...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Складання розрахункової системи методу переміщень
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.014 сек.
Новости и инфо для студентов