рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Образование
- /
- СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
Реферат Курсовая Конспект
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ - раздел Образование, ПЛОСКАЯ СИСТЕМА СИЛ Задание К.7. Определение Абсолютной Скорости И Абсолютного Ускорения Точки...
Задание К.7. Определение абсолютной скорости и абсолютного ускорения точки
Точка М движется относительно тела D. По заданным уравнениям относительного движения точки М и движения тела D определить для момента времени t = t1 абсолютную скорость и абсолютное ускорение точки М.
Схемы механизмов показаны на рис. 14 — 16, а необходимые для расчета данные приведены в табл. 7. для
Пример выполнения задания. Дано: схема механизма (рис. 17)
s r = ОМ = 16 – 8 cos 3πt см; φ e = 0,9t2 - 9t3 рад; t 1 = 2/9 с.
Решение. Будем считать, что в заданный момент времени плоскость чертежа (рис. 17) совпадает с плоскостью треугольника D . Положение точки М на теле D определяется расстоянием s r = ОМ
При t = 2/9 с
s r = 16 - 8 cos(3π • 2/9) = 20,0 см.
Абсолютную скорость точки М найдем как геометрическую сумму относительной и переносной скоростей:
 = r + e .
= r + e .
Табл. 7|
| Но-мер вари-анта | Уравнение относительного движения точки М ОМ = s r = s r (t) , см | Уравнение движения тела | t 1 , с | R , см | a, см | Α, град | Дополнительные данные | |
| φ e = φ e (t) , рад | хe = хe (t) , см | |||||||
| 18 sin (πt/4) | 2t3 - t2 | 2/3 | - | - | ||||
| 20 sin πt | 0,4 t2 + t | 5/3 | - | - | ||||
| 6t3 | 2t + 0,5 t2 | - | - | |||||
| 10 sin (πt/6) | 0,6 t2 | - | - | |||||
| 40 π cos (πt/6) | 3t + 0,5 t3 | - | - | |||||
| 3t + 0,27 t3 | 10/3 | - | - | φ r =0,15 π t3 | ||||
| 20 cos 2πt | 0,5 t2 | 3/8 | - | |||||
| 6 (t + 0,5 t2) | t3 -5 t | - | - | |||||
| 10 (1 + sin 2πt ) | 4t + 1,6 t2 | 1/8 | - | - | - | |||
| 20 π cos (πt/4) | 1,2t - t2 | 4/3 | - | |||||
| 25 sin (πt/3) | 2 t2 – 0,5 t | - | - | |||||
| 15 πt3 /8 | 5t - 4 t2 | - | ||||||
| 120 πt2 | 8t2 – 3 t | 1/3 | - | - | ||||
| 3 + 14 sin πt | 4t - 2 t2 | 2/3 | - | - | ||||
| 5√2 (t2 + t) | 0,2t3 + t | - | ||||||
| 20 sin πt | 5t - 0,5 t2 | 1/3 | - | - | ||||
| 8t3 + 2t | 0,5 t2 | - | 4√5 | - | ||||
| 10 t + t3 | 8t – t2 | - | - | |||||
| 6t + 4 t3 | t + 3t2 | - | - | |||||
| 30 π cos (πt/6) | 6t + t2 | - | - | |||||
| 25 π (t + t2) | 2t - 4 t2 | ½ | - | - | ||||
| 10 π sin (πt/4) | 4t - 0,2 t2 | 2/3 | - | - | ||||
| 6 π t2 | - | - | - | φ = πt3 /6; 0 10 = 0 2А = 20 см | ||||
| 75 π (0,1t + 0,3 t3) | 2t - 0,3 t2 | - | - | |||||
| 15 sin (πt/3) | 10t - 0,1 t2 | - | - | - | ||||
| 8 cos (πt/2) | - 2 πt2 | 3/2 | - | - | ||||
| - | - | 50 t2 | - | - | φ r = 5 π t3 /48 | |||
| 2,5 πt2 | 2t3 -5 t | - | - | |||||
| 5 πt3/ 4 | - | - | - | φ = π t3 /8; 0 10 = 0 2А = 40 см | ||||
| 4 π t2 | - | t3 + 4 t | - | - |
Примечания. Для каждого варианта положение точки М на схеме соответствует положительному значению s r; в вариантах 5, 10, 12, 13, 20 —24, 28 —30 ОМ = s r — дуга окружности; на схемах 5, 10, 12, 21, 24 ОМ — дуга, соответствующая меньшему центральному углу. Относительное движение точки М в вариантах б и 27 и движение тела D в вариантах 23 и 29 определяются уравнениями, приведенными в последнем столбце табл. 7.
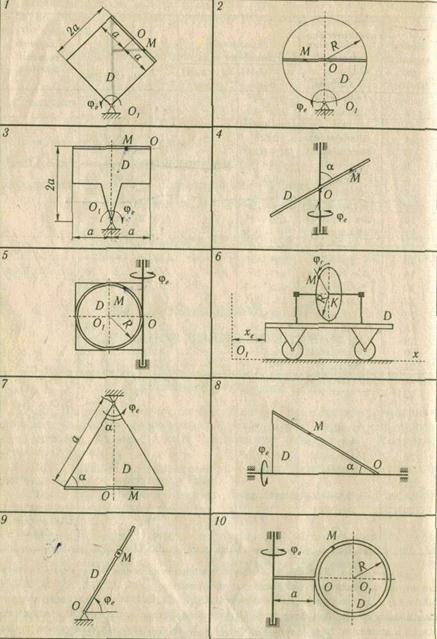
Рис. 14

Рис. 15

Рис. 16

Рис. 17

Рис. 18
Модуль относительной скорости
v r = ׀ ׀,
׀,
где
= dsr / dt = 24 π sin3 πt
При t=2/9 с = 65,2 см/с; v r = 65,2 см/с.
Положительный знак у показывает, что вектор направлен в сторону возрастания sr.
Модуль переносной скорости
v e = Rωe, (1)
где R — радиус окружности L, описываемой той точкой тела, с которой в данный момент совпадает точка М, r = sr sin 30° = 10,0 см; ωe - модуль угловой скорости тела:
ωe = ׀  ׀ ; = d φ e /dt = l,8t - 27t2.
׀ ; = d φ e /dt = l,8t - 27t2.
При t = 2/9 с
= -0,93 рад/с; ωe = 0,93 рад/с.
Отрицательный знак у величины показывает, что вращение треугольника происходит вокруг оси Оz в сторону, обратную направлению отсчета угла φ. Поэтому векторнаправлен по оси Оz вниз (рис. 18, а).
Модуль переносной скорости, по формуле (1),
v e = 9,3 см/с.
Вектор e направлен по касательной к окружности L в сторону вращения тела. Так как e и r взаимно перпендикулярны, модуль абсолютной скорости точки М
v = 
или
v = 65,9 см/с.
Абсолютное ускорение точки равно геометрической сумме относительного, переносного и кориолисова ускорений:
 = r + e + c,
= r + e + c,
или в развернутом виде
= r r + r n + вe + цe + c,
Модуль относительного касательного ускорения
ar r = |  |, где
|, где
r r = d 2sr /dt2 = 72π2 cos 3πt
При t = 2/9 с
r r = - 355 см/с2; ar r = 355 см/с2.
Отрицательный знак r r показывает, что вектор r r направлен в сторону отрицательных значений sr Знаки r и r r различны; следовательно, относительное движение точки М замедленное.
Относительное нормальное ускорение
ar n = v 2 r / ρ = О,
так как траектория относительного движения — прямая (р = ∞).
Модуль переносного вращательного ускорения
a вe = Rε e , (2)
где ε e = |  e |,
e |,  — модуль углового ускорения тела D:
— модуль углового ускорения тела D:
e = d 2 φ e /d t2 = 1,8 -54 t.
При t = 2/9 с
e = - 10,2 рад/с2; ε = 10,2 рад/с2.
Знаки e и одинаковы; следовательно, вращение треугольника I ускоренное, направления векторов и e совпадают (рис. 18, а, б)
Согласно (2),
a вe = 102 см/с2.
Вектор вe направлен в ту же сторону, что и e .
Модуль переносного центростремительного ускорения
цe = R ωe 2 или цe = 9 см/с2.
Вектор цe направлен к центру окружности L.
Кориолисово ускорение
c = 2 ωe х r.
Модуль кориолисова ускорения
ас = 2 ωe v r sin (e , r),
где
sin(e , r) = sin 150° = 0,5.
С учетом найденных выше значений ωe и v r получаем
ас = 61 см/с2.
Вектор c направлен согласно правилу векторного произведения (рис. 18, б).
Модуль абсолютного ускорения точки М находим способом проекций:
a x = a вe + ас; а y = - цe — r r cos 60°;
a z = -r r cos 30°; a = .
.
Результаты расчета сведены в табл.8.
Табл. 8
| , рад / с
| Скорость, см/с | e , рад / с2
| Ускорение, см/с2 | ||||||||||
| v e | r
| V | цe
| a вe | ar n | r r
| ас | a x | а y | a z | a | ||
| -0,93 | 9,3 | 65,2 | 65,9 | -10,2 | -355 | -186 |
ПРАКТИЧЕСКИЕ ЗАНЯТИЯ № 6 и № 7 (2.3.6; 2.3.7.)
– Конец работы –
Эта тема принадлежит разделу:
ПЛОСКАЯ СИСТЕМА СИЛ
ПРАКТИЧЕСКОЕ ЗАНЯТИЕ... ПЛОСКАЯ СИСТЕМА СИЛ СИСТЕМА ПРОИЗВОЛЬНО... СЛОЖНОЕ ДВИЖЕНИЕ СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ Точка М...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.022 сек.
Новости и инфо для студентов