рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Информатика
- /
- Детерминированные динамические системы с дискретным временем.
Реферат Курсовая Конспект
Детерминированные динамические системы с дискретным временем.
Детерминированные динамические системы с дискретным временем. - раздел Информатика, Исторический очерк развития кибернетики Многие Приложения В Экономике Требуют Моделирования Систем Во Времени. ...
Многие приложения в экономике требуют моделирования систем во времени.
Состояние системы в момент времени t описывается мерным вектором X(t).
X1(t)
X(t) = ….. , X (t)  Rn ( R – множество всех вещественных чисел)
Rn ( R – множество всех вещественных чисел)
Xn(t)
t
Эволюция системы со временем описывается функцией
G (X0, t,  ) , где
) , где
X0 – начальное состояние системы;
t – время;
- вектор параметров.
Функция g(*) называют также переходной функцией
Функция g(*) – это правило, описывающее текущее состояние как функцию от времени, начальных условий и параметров.
Например: Xt = X0 (1+)t = g (X0, t, )
Функция g(*) как правило не известна. Обычно она задана неявно как решение системы разностных уравнений.
Разностное уравнение или система уравнений – это уравнения в следующей форме : F (t, Xt, Xt+1, …, Xt+m, ) = 0 (1),где
Xt – состояние системы в момент времени t.
Решение уравнения (1) – это последовательность векторов
Xt =  X0, X1,…,
X0, X1,…, 
Обычно предполагается, что уравнение (1) можно решить аналитически относительно Xt+m и переписать в форме так называемых уравнений – состояний :
Xt+m = f (t, Xt, Xt+1, …,Xt+m-1, ) (2)
Например:
Xt+2 = Xt + Xt+1/2 + t
Любую систему представляют в форме (2) всегда можно ?
Разностное уравнение (2)называется линейным, если F(*) является линейной фуекцией переменных состояний (не обязательно линейно относительно )
В уравнениях (1) и (2) величина m называется порядком системыне является серьезным ограничением, так как системы более высокого порядка путем введения дополнительных переменных и уравнений.
Пример:Xt = f (Xt-1, Yt-1) – система 2-го порядка
Введем Yt = Xt-1
Xt = f(Xt-1, Yt-1)
Yt = Xt-1
Таким образом, мы будем рассматривать только системы 1-го порядка следующего вида:
Xt-1 = f(t, Xt, ) (3)
Уравнение (3) называется автономным, если t не входит в него отдельным аргументом.
Пример:
Рассмотрим динамику основных фондов на предприятии
Kt – стоимость основных фондов предприятия в период t.
 - норма амортизации, то есть % основных фондов, которые изъяли на предприятии за год.
- норма амортизации, то есть % основных фондов, которые изъяли на предприятии за год.
It = инвестиции в основные фонды.
Kt+1 = ( 1 - ) Kt + It – уравнение 1-го порядка, линейное, если It = I, тогда
Kt+1 = ( 1 - ) Kt + I – уравнение автономное
Если It = I(t) – неавтономное (зависит от t)
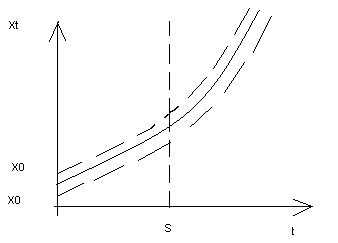
Решение уравнения (3) – это последовательность векторов состояния {Xt}, удовлетворяющих уравнению (3) для всех возможных состояний. Эта последовательность называется траекторией системы. Уравнение (3) показывает, как состояние системы изменяется от периода к периоду, а траектория системы дает ее эволюцию как функцию начальных условий и состояния внешней среды .
Если известно начальное состояние X0, легко получить последовательность решений путем итеративного применения отношения (3), получим переходную функцию следующим образом:
Xt+1 = f (t, Xt, )
{Xt}
X0 = X0
X1 = f ( 0, X0, ) = g (0, X0, )
X2 = f ( 1, X, ) = f (1; f (0, X0, );) = g (1, X0, )
Xt+1 = f (t, Xt, ) = f ( t, g, (t – 1, X0, ),) = g (t, X0, )
Если f (*) однозначная, всюду определенна функция, то существует уникальное решение уравнения (3) для любого X0.
Если функция имеет вид f (t, Xt, ) = / Xt – не всюду опрделенная.
Если f (*) непрерывная дифференциальная функция, то решение также будет гладким относительно и X0
Полученное решение зависит от начального состояния X0.
Задача с граничным условием состоит из уравнения (3) и граничного условия, задаваемого в формуле:
Xs = Xs (4)
Если в уравнении (4) – S = 0 , то оно называется начальным состоянием.
Уравнение (3) имеет много решений, а уравнение (3) + (4) – система – единственное решение, поэтому различают общее и частное решение разностного уравнению (3):
Xtg = X(t, c, ) = {Xt(Xt+1 = f (t, Xt, ))} , где параметр е индексирует частное решение.
Пример:
Xt – размер вклада в момент t
Z - % я ставка
Xt+1 = Xt ( 1+ z ) ; X0 = …
X1 = X0 ( 1 + z)
X2 = X1 ( 1 + z) = X0 ( 1 + z)2 = g (X0, t, z) , где t = 2
Если можно найти общее решение системы (3) . у нас будет полная информация о поведении системы со временем, будет легко определить, как система реагирует на изменение параметров.
К сожалению, общее решение существует только для определенных классов l – го порядка ( в частности для линейных систем )
– Конец работы –
Эта тема принадлежит разделу:
Исторический очерк развития кибернетики
Модели с ассиметричной информацией... Под ассиметричной информацией понимается ситуация когда один из экономических... Рынок лимонов Акерлофа хорошие Vgood плохие Vbad...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Детерминированные динамические системы с дискретным временем.
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.021 сек.
Новости и инфо для студентов