рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Высокие технологии
- /
- Назначение и принципы построения периферийных устройств УВК РА
Реферат Курсовая Конспект
Назначение и принципы построения периферийных устройств УВК РА
Назначение и принципы построения периферийных устройств УВК РА - раздел Высокие технологии, Теоретические основы построения и эксплуатации микропроцессорных систем автоматики Периферийное Устройство (Пу) Увк Ра Служит Для Сопряжения Цпу С Объектами Низ...
Периферийное устройство (ПУ) УВК РА служит для сопряжения ЦПУ с объектами низовой и локальной автоматики ОУ для станций с количеством централизованных стрелок до 50. Для станций с количеством централизованных стрелок от 50 до 100 в УВК РА используется два периферийных устройства.
В состав периферийного устройства УВК РА входят (см. рис. 7.4):
• блок связи (БС);
• устройства связи с объектом (УСО);
• модуль безопасного контроля и отключения (МБКО).
Блок БС содержит три микропроцессорных субблока (СБС), которые предназначены для управления УСО и МБКО, а также для связи с ЦПУ. Структура аппаратных средств БС и построение межканальных связей аналогичны структуре ЦПУ (рис. 7.7).
В течение каждого рабочего цикла БС выполняет:
• проверку на возможное появление отказов типа «пробой» выходных ключей (каждые 50 мс);
• проверку входных данных на нарушение парафазности;
• тестирование внутренних ресурсов БС;
• проверку на возможность включения и выключения выходных управляющих ключей;
• программную обработку результатов тестирования, взаимный обмен данными между БС,
передачу диагностической информации в ЦПУ.
УСО представляет собой пассивное трехканальное устройство с внутри- и межканальным контролем. Программное управление УСО осуществляет БС. В состав УСО входят:
• модули сбора информации (МСИ);
• модули выходных усилителей (МВУ);
• модуль источника питания (МИП).
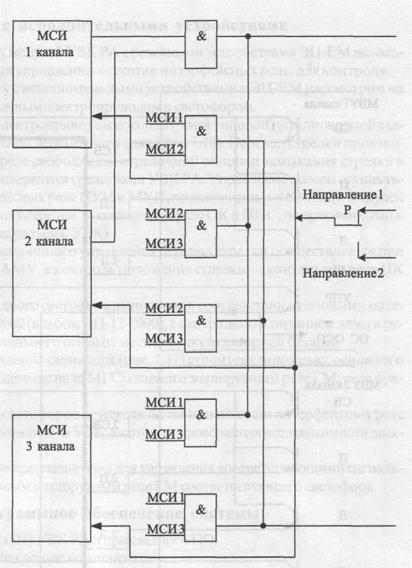
Модули МСИ предназначены для сбора дискретной информации о состоянии управляемого объекта, который осуществляется с «тройниковых» контактов реле—датчиков. Каждый МСИ содержит ключи групповой коммутации питания 56 тыловых и 56 фронтовых контактов, а также 56 гальванических входов, соединенных с переключающими контактами. Данные, получаемые МСИ при подключении питания к тыловым контактам, инверсны получаемым при подключении питания к фронтовым контактам (при исправном МСИ и отсутствии дребезга контактов), что позволяет осуществить контроль сбора информации на основе использования методов ее парафазного кодирования. Для обеспечения безопасности и безотказности каждый выход датчика подключается к входам трех модулей МСИ, расположенных в разных каналах УСО.
На рис. 7.8 представлена структурная схема МСИ. Опрос состояния контакта реле производится по инициативе как минимум двух каналов, коммутирующих соответствующие МСИ. Наличие электрических цепей обратных связей в каждом МСИ позволяет на программном уровне осуществлять контроль работоспособности транзисторных ключей направлений.
Модули МВУ предназначены для формирования сигналов, обеспечивающих включение или отключение обмоток управляющих реле ОУ. Кроме того, в МВУ формируются импульсные сигналы управления для модулей, входящих в состав МБКО. Общее количество выходных сигналов управления обмотками реле в одном МВУ равно 48, а количество выходов управления МБКО—3.
МБКО является специализированным источником питания выходных каскадов МВУ и обеспечивает безусловное его отключение по результатам контроля состояния управляющих выходов УСО. В каждом модуле МБКО имеется устройство, формирующее напряжение питания выходных каскадов МВУ. Нагрузочная способность по этому выходу МБКО рассчитана на воз-
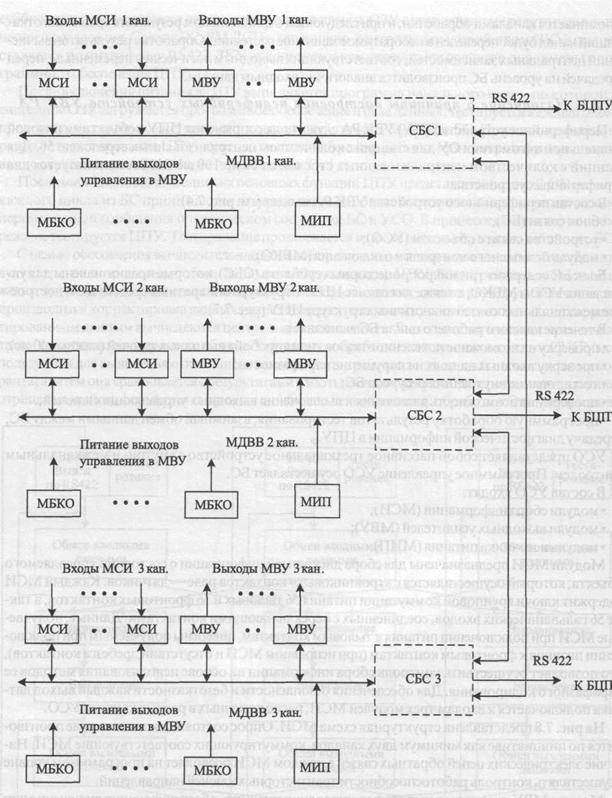
Рис. 7.7. Структура периферийных устройств
можность обеспечения питания доя выходных каскадов одного МВУ. Таким образом, число модулей МБКО в периферийном устройстве равно числу модулей МВУ.
Основной задачей МБКО, связанной с осуществлением безопасного функционирования УСО, является оперативное (в течение примерно 48 мс) снятие напряжения с обмоток реле по результатам программного контроля состояния управляющих выходов МВУ.
|
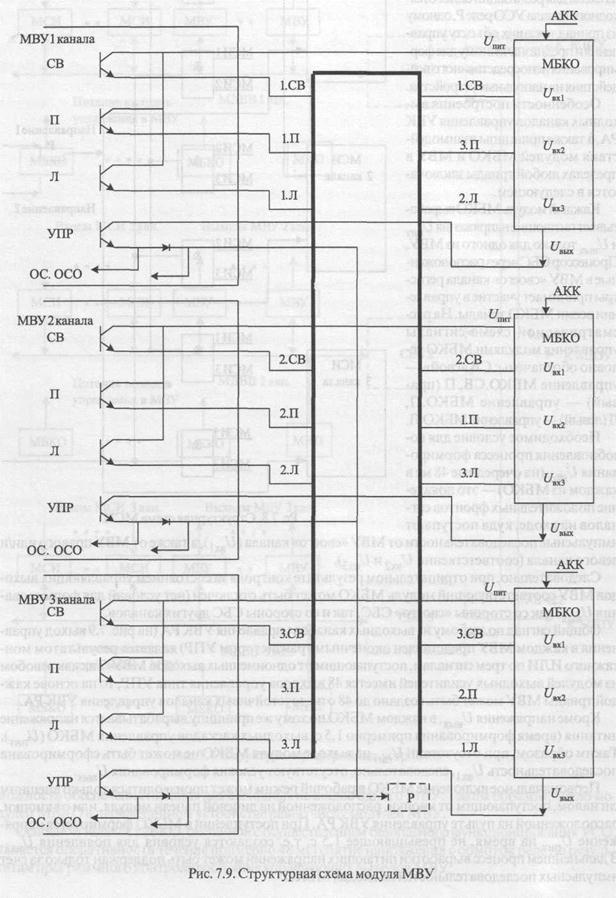
На рис. 7.9 на примере триады модулей МВУ и МБКО представле-ш схема для реализации одного выгодного канала УСОреле Р, одному 13 принадлежащих объекту управ-гения и предназначенному для формирования непосредственного воздействия на напольные устройства.
Особенности построения вы-ходных каналов управления УВК ЭА, а также принципы взаимодействия модулей МБКО и МВУ в тределах любой триады заключа-отся в следующем.
Каждый модуль МБКОвыраба-ъшает питающие напряжения Unm и„„ только для одного из МВУ.
ВЫЛ
1роцессор СБС через расположенные в МВУ «своего» канала регис-гры принимает участие в управле-жи всеми МБКО триады. На рас-;матриваемой схеме сигналы /правления модулями МБКО ус-ювно обозначены: СВ «свой»— /правление МБКО.СВ, П (пра-5ЫЙ) — управление МБКО.П, 1 (левый)—управление МБКО Л. Необходимое условие для во-юбновления процесса формиро-!ания £/вых (на очередные 48 мс в саждом из МБКО)—это появле-
ние положительных фронтов сиг
налов на входе, куда поступают Ра 7-8' Структурная схема МСИ
импульсные последовательности от МВУ «своего» канала (£/вх1), а также от МВУ правого или/и
левого канала (соответственно £/вх2 и Ц,хз)-
Следовательно, при отрицательном результате контроля за состоянием управляющих выходов МВУ соответствующий модуль МБКО может быть отключен (нет условий для формирования £/вых) как со стороны «своего» СБС, так и со стороны СБС других каналов.
Общий сигнал по любому из выходных каналов управления УВК РА (на рис. 7.9 выход управления в каждом МВУ представлен оконечным транзистором УПР) является результатом монтажного ИЛИ по трем сигналам, поступающим от одноименных выходов МВУ. Так как в любом из модулей выходных усилителей имеется 48 выходов управления типа УПР, то на основе каждой триады МВУ может быть создано до 48 отказоустойчивых каналов управления УВК РА.
Кроме напряжения UBUX, в каждом МБКО по тому же принципу вырабатывается напряжение питания (время формирования примерно 1,5 с) выходных каскадов управления МБКО (Unm). Таким образом, при отсутствии Unm на выходе модуля МБКО не может быть сформирована последовательность [/вх1, следовательно, отсутствуют условия формирования £/вых.
Первоначальное включение МБКО в рабочий режим может производиться только внешним сигналом, поступающим от кнопки, расположенной на лицевой панели модуля, или от кнопки, расположенной на пульте управления УВК РА. При поступлении в МБКО формируется напряжение Unm на время, не превышающее 1,5 с, т.е. создаются условия для появления UBK. В дальнейшем процесс выработки питающих напряжений может быть поддержан только за счет импульсных последовательностей на входах МБКО.
|
7.5. Увязка с исполнительными устройствами
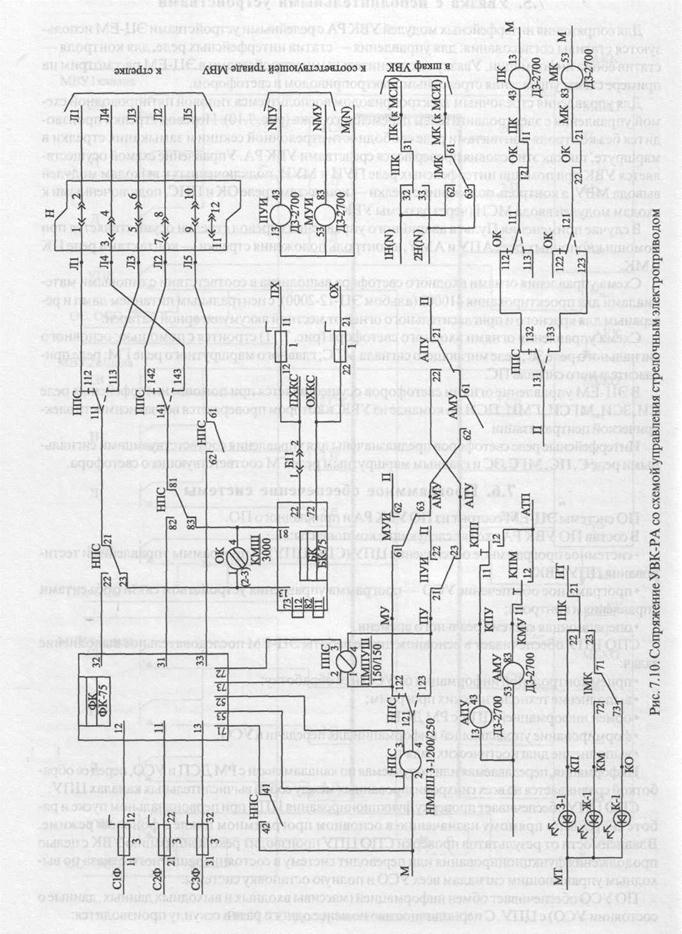
Для сопряжения интерфейсных модулей УВК РА с релейными устройствами ЭЦ-ЕМ используются стативы согласования: для управления — статив интерфейсных реле, для контроля — статив сбора информации. Увязку с исполнительными устройствами в ЭЦ-ЕМ рассмотрим на примере схемы управления стрелочным электроприводом и светофором.
Для управления стрелочным электроприводом воспользуемся типовой пятипроводной схемой управления с электродвигателем переменного тока (рис. 7.10). Перевод стрелки производится без контроля контактами реле свободности стрелочной секции и замыкания стрелки в маршруте, так как эти условия проверяются средствами УВК РА. Управление схемой осуществляется УВК при помощи интерфейсных реле ПУИ и МУИ, подключенных к выходам модулей вывода МВУ, а контроль положения стрелки—контактами реле ОК и ППС, подключенными к входам модулей ввода МСИ (через разъемы УВК).
В случае применения Пульта аварийного управления перевод стрелки осуществляется при помощи кнопочных реле АПУ и АМУ, а контроль положения стрелки — контактами реле ПК иМК.
Схема управления огнями входного светофора выполнена в соответствии с типовыми материалами для проектирования 410002 (альбом ЭЦ-12-2000), с центральным питанием ламп и резервным для красного и пригласительного огней от местной аккумуляторной батареи.
Схема управления огнями входного светофора (рис. 7.11) строится с помощью: основного сигнального реле ЗС; реле мигающего сигнала МГС; главного маршрутного реле ГМ; реле пригласительного сигнала ПС.
В ЭЦ-ЕМ управление огнями светофоров осуществляется при помощи интерфейсных реле СИ, ЗСИ, МГСИ, ГМИ, ПСИ по команде из УВК, в котором проверяются все зависимости электрической централизации.
Интерфейсные реле светофоров предназначены для управления соответствующими сигнальными реле С, ПС, МГС, ЗС и главным маршрутным реле ГМ соответствующего светофора.
7.6. Программное обеспечение системы
ПО системы ЭЦ-ЕМ состоит из ПО УВК РА и прикладного ПО. В состав ПО УВК РА входят следующие компоненты:
• системное программное обеспечение ЦПУ (СПО ЦПУ)—программы управления и тести
рования ЦПУ УВК;
• программное обеспечение УСО — программа управления устройством связи с объектами
управления и контроля;
• операционная система реального времени.
СПО ЦПУ обеспечивает в основном цикле работы ЭЦ-ЕМ последовательное выполнение задач:
• прием контрольной информации от УСО и ее обработку;
• выполнение технологических программ;
• обмен информацией ЦПУ с РМ ДСП;
• формирование управляющей информации для передачи в УСО;
• выполнение диагностических задач.
Информация, передаваемая или получаемая по каналам связи с РМ ДСП и УСО, перед ее обработкой сравнивается во всех синхронизированных между собой вычислительных каналах ЦПУ.
СПО ЦПУ обеспечивает проверку функционирования ЦПУ при первоначальном пуске и работе системы по прямому назначению в основном программном цикле в фоновом режиме. В зависимости от результатов проверки СПО ЦПУ производит реконфигурацию УВК с целью продолжения функционирования или переводит систему в состояние защитного отказа по выходным управляющим сигналам всех УСО и полную остановку системы.
ПО УСО обеспечивает обмен информацией (массивы входных и выходных данных, данные о состоянии УСО) с ЦПУ. С периодичностью не менее одного раза в секунду производится:
|

|
• сбор информации о состоянии объектов станции (стрелок, светофоров, рельсовых цепей и
т.д.) с периодичностью 2—4 раза за цикл функционирования ЭЦ-ЕМ, обработку и выдачу ее в
ЦПУ синхронно с циклом его работы;
• прием от ЦПУ и выдачу управляющих воздействий на объекте с контролем обратных связей;
• оперативное тестирование процессора, памяти и каналов обмена;
• обмен между каналами УСО для контроля массивов данных и каналов ввода-вывода;
• формирование массивов данных об отказах и сбоях УСО, а также о блокировках при опас
ных отказах.
ОС РВ имеет архитектуру микроядра и обеспечивает:
• управление задачами — передачу управления наиболее приоритетной из состоящих в оче
реди готовых к выполнению задач;
• управление временем — отсчет интервалов реального времени по прерываниям таймера и
постановка задач в очередь задач, готовых к выполнению;
• обработку прерываний и активизацию задач по анализу связанных с ними событий;
• обработку запросов о взаимодействии между выполняющимися задачами и управление вре
менными интервалами.
Прикладное ПО включает в себя:
• программу реализации алгоритма технологических задач системы ЭЦ стрелок и сигналов;
• базу данных;
|
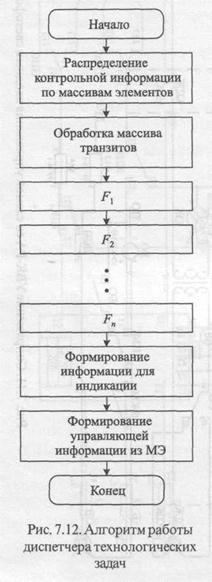
• программу диспетчер технологических задач.
Работая в цикле, диспетчер технологических задач организует последовательное выполнение технологических функций ЭЦ-ЕМ (Ft—F- в соответствии с алгоритмом (рис. 7.12). ПО системы ЭЦ-ЕМ позволяет обеспечивать эксплуатационную работу на станции с требуемой степенью безопасности движения поездов:
• установку маршрутов;
• поддержание разрешающих показаний светофоров;
• выбор показаний светофора;
• отмену маршрутов;
• посекционное размыкание маршрутов;
• разделку угловых заездов;
• управление кодированием маршрутов;
• контроль условий безопасности для пригласительного све
тофора;
• включение пригласительного огня;
• подготовку трассы маршрута;
• ограждение путей;
• искусственное размыкание секций;
• обработку макета стрелки;
• автовозврат стрелки;
• индивидуальный перевод стрелки;
• подачу извещения на переезды и монтерам пути;
• увязку с перегонами;
• местное управление;
• автоблокировку.
Технологические программы представляют собой независимые программные модули, обмен информацией между которыми осуществляется только через базы данных, объединенные в одной доступной для них общей области памяти. Всю совокупность баз данных и массивов информации мож-
но условно разделить на данные, специфичные для конкретной станции, и те, которые не зависят от конкретного приложения.
Информация о конкретной станции построена по географическому принципу. Это массив элементов (МЭ), составляющие которого логически связаны между собой подобно блокам в традиционных системах релейной централизации. Ктаким элементам относятся, например, стрелка, светофор, стрелочно-путевая секция.
Каждый элемент МЭ содержит постоянную информацию (тип элемента, его связь с другими элементами) и переменную информацию, отображающую логическое и физическое состояние объекта централизации.
Массив маршрутов (ММ) отражает топологию оборудованной системой МПЦ станции. Подобно таблице маршрутов, он содержит информацию о каждом возможном маршруте. В нем прописываются все элементы МЭ, входящие в маршрут и их состояние в соответствии с выбранной трассой. Существует также ряд массивов, содержание которых не зависит от проектируемой станции. Это так называемые рабочие массивы, емкость которых рассчитывается по максимуму (для самой крупной станции), а хранящаяся информация динамически меняется в зависимости от состояния технологического процесса. Массивы управляющей информации (МУИ), текущего состояния объектов централизации (МТСОЦ), отображаемой информации (МОИ) обновляются в каждом цикле работы системы. Формирование записей в других массивах производится по мере поступления от технологических программ или диалоговой подсистемы заявок на выполнение тех или иных технологических функций. Так, например, заявки от диалоговой подсистемы на установку маршрута формируют запись в массиве устанавливаемых маршрутов (МУМ), соответствующая программа ее обрабатывает, проверив условия безопасности, осуществляет перевод стрелок и их замыкание в маршруте. По окончании этого процесса запись из МУМ удаляется и формируется запись в массиве маршрутов с разрешающими показаниями (ММРП) как заявка на открытие светофора.
Программа постоянного контроля условий безопасности для поддержания разрешающего показания светофора работает с этой записью, пока открыт светофор. При вступлении поезда на участок приближения путем записи в массив размыкаемых маршрутов (МРМ) формируется заявка на запуск программы посекционного размыкания маршрутов, после чего светофор перекрывается и запись из ММРП удаляется. Запись из МРМ стирается по окончании размыкания маршрута.
Следует отметить, что заявка на выполнение какой-либо функции не может быть произведена путем прямой записи в ее массив информации от другой функции.
Программа, реализующая технологическую функцию, имеет право записать свое требование только в массив транзитов (МТ), а уже программа обработки МТ примет решение о возможности формирования записи в соответствующем рабочем массиве.
Технологические программы оперируют информацией о состоянии объектов централизации и на основе ее формируют управляющие воздействия. В каждом цикле работы системы производится опрос состояния датчиков системы МПЦ и формирование МТСОЦ. Затем эта информация распределяется по МЭ и используется программами. Результаты работы технологических программ размещаются в МЭ и по окончании цикла переносятся в МУИ для последующей передачи в устройства сопряжения с напольными объектами. В конце цикла производится также обновление МОИ, используемого для отображения диалоговой подсистемой текущего состояния технологического процесса.
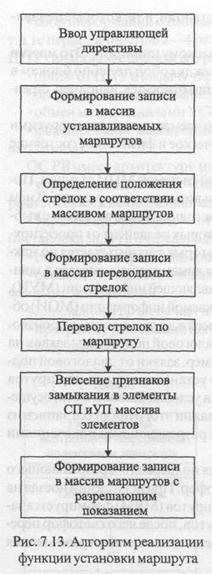
Рассмотрим в качестве примера алгоритм, реализующий функцию установки маршрута (рис. 7.13.). Он обеспечивает замыкания всех стрелочно-путевых секций и участков пути по трассе устанавливаемого маршрута с проверкой выполнения необходимых условий безопасности.
Данный алгоритм реализует следующие основные функции:
• определение трассы маршрута;
• проверку необходимых условий безопасности по трассе маршрута;
• формирование управляющей информации на перевод стрелок;
|
• внесение признаков замыкания в элементы секций по трассе
маршрута;
• установку маршрута в режим автодействия;
• установку маршрута со снятием части условной безопас
ности;
Алгоритм циклически обрабатывает маршруты, задаваемые директивами на установку поездных и маневровых маршрутов.
В результате реализации данного алгоритма стрелки переводятся в требуемое положение, замыкаются секции маршрута, светофор подготавливается к включению пригласительного сигнала или открытию с проверкой выполнения условий безопасности по маршруту. Для открытия светофора информация о маршруте должна быть помещена через МТ в массив маршрутов с разрешающим показанием (ММРП).
Маршрут не может быть установлен по следующим причинам:
• выявлена враждебность по трассе маршрута;
• превышено максимально допустимое значение счетчика по
ложения шунта;
• превышено максимально допустимое время перевода стре
лок по маршруту.
Во всех этих случаях формируется сообщение о невозможности установки маршрута с указанием причин, а так же производится стирание ранее выставленных признаков в МЭ.
В первом после ввода управляющей директивы цикле обработки маршрута выставляется признак директивы и, если не было обнаружено враждебности по трассе маршрута, производится внесение соответствующих признаков в элементы маршрута «Стрелки» и «Светофор». Так, например, в элементы «стрелки» вносится признак перевода, равный плюсовому или минусовому положению ПУР или МУР в соответствии с указанным в массиве маршрутов (ММ) требуемом положением стрелки. Информация обо всех стрелках, требующих перевода,
заносится в массив переводимых стрелок (МГТС). В том случае, если выполнены все условия для перевода стрелок, формируется команда на пуск тех, которые указаны в МПС.
Далее выполняется замыкание маршрута—внесение признака замыкания во все элементы СП и УП в ЭМ по его трассе. При этом признаки перевода стрелок ПУР, МУР в элементах «стрелки» стираются.
После замыкания маршрута информация о нем заносится в МТ и исключается из МУМ. Информация о маршруте, заносимая в МТ, включает в себя адрес записи маршрута в ММ и признак вида обработки, который определяет статус маршрута:
• обработка маршрута прекращена;
• маршрут подготовлен к вклчению пригласительного сигнала;
• маршрут с разрешающим показанием;
• открытие сигнала по маршруту с выдержкой времени;
• открытие сигнала по маршруту после освобождения пути приема или участка удаления.
Все маршруты, в которых необходимо открыть светофор, помещаются через МТ в массив
маршрутов с разрешающим показанием ММРП, а затем производится выбор и включение требуемого в данный момент показания светофора.
Если маршрут устанавливается со снятием части условий безопасности, то адрес маршрута передается в МТ с признаком вида обработки «снятие условий безопасности», чем создаются условия для последующего открытия пригласительного сигнала.
Система Ebilock 950. (рис. 3.44).
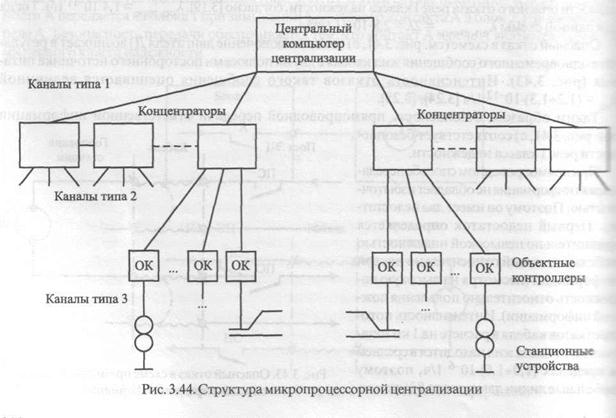
Центральный компьютер централизации реализует логику ЭЦ, проверяет условия безопасности движения поездов, формирует управляющие команды для напольных станционных устройств и обрабатывает контрольную информацию. Связь центрального компьютера с напольным оборудованием осуществляется через концентраторы и объектные контроллеры (ОК). Последние располагаются в горловинах станции в непосредственной близости от управляемых объектов. Для этого используются специальные шкафы и контейнеры.
Данная структура имеет три типа каналов передачи информации. Каналы типа 1 являют телемеханическими, обеспечивающими передачу данных между центральным компьютером и концентраторами. Концентратор является промежуточным передаточным элементом от центрального компьютера к объектному контроллеру. Сообщения, которые передаются по каналу типа 1, несут ответственную информацию, и к ним предъявляются высокие требования по безопасности, поэтому для защиты от искажений здесь используется избыточность (корректирующие коды). Передача данных может осуществляться по симметричному медному или оптоволоконному кабелю.
Каналы типа 2 используются для передачи данных между концентраторами и объектными контроллерами. Последние принимают от концентратора управляющие приказы, передаваемые центральным компьютером, и преобразуют их в электрические сигналы для управления наполь ными устройствами. Контрольные сигналы, принятые от напольного оборудования, преобразу ются в объектном контроллере в сообщения и через концентраторы передаются в центральный компьютер. Каналы типа 2 используются внутри одного шкафа или контейнера, поэтому для передачи информации преобразованной с применением корректирующих кодов, могут использоваться шины.
Каналы типа 3 связывают объектные контроллеры и напольные устройства для передачи сигналов управления и контроля. При распределенной конфигурации МПЦ расстояния между ними невелики, поэтому целесообразно использовать прямопроводное управление с помощью кабельных линий.
– Конец работы –
Эта тема принадлежит разделу:
Теоретические основы построения и эксплуатации микропроцессорных систем автоматики
Теоретические основы построения и эксплуатации микропроцессорных систем автоматики... ОСНОВЫ ПОСТРОЕНИЯ МИКРОПРОЦЕССОРНЫХ... ЦЕНТРАЛИЗАЦИИ Причины применения микропроцессорных...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Назначение и принципы построения периферийных устройств УВК РА
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.025 сек.
Новости и инфо для студентов