Алгоритмическое обеспечение комплекса технических средств управления и контроля
Алгоритмическое обеспечение комплекса технических средств управления и контроля - раздел Высокие технологии, Теоретические основы построения и эксплуатации микропроцессорных систем автоматики Контроль Состояния Объектов Тс. Информация О Состояниях ...
Контроль состояния объектов ТС. Информация о состояниях контролируемых объектов формируется путем опроса плат УМВ. Конструктивно входы ТС на плате сгруппированы по восемь, из которых один является диагностическим, а общее число групп равно восьми. Таким образом, каждая плата УМВ обеспечивает подключение до 56 сигналов ТС. Для определения состояния группы объектов необходимо выдать на плату соответствующую маску, затем считать байт состояния восьми входов. Эта процедура выполняется по прерыванию от таймера с периодом 0,2 мс последовательно по всем восьми группам. Опрос всех объектов на плате осуществляется в течение 1,6 мс. Сигналы о состоянии контролируемых объектов физически представлены потенциалом. Объект считается активным, если на входе платы УМВ есть постоянное напряжение, и пассивным—в противном случае. Определяется логическое состояние объекта в течение 0,2 с методом накопления. Байты состояния объектов, считанные с периодом 0,2 мс, заносятся в буфер накопления по условию конъюнкции.
Обработка команд ТУ. При приеме команд ТУкоды дешифруются, анализируются на корректность формата данных и записываются в буферы команд ТУ, один из которых организован по принципу «первый пришел — первый вышел», а второй предназначен для одиночной ответственной команды ТУ. В основном цикле ПО осуществляется идентификация команд ТУ, выбор объектов управления и формируются управляющие воздействия (УВ) согласно типам команд. Различают следующие типы команд ТУ:
• простые команды воздействия на одиночный объект;
• команды установки и отмены маршрутов;
• команды перевода стрелок;
• множественные команды, т.е. при поступлении одной команды ТУ осуществляется одновременное формирование управляющих воздействий на несколько объектов;
• команда на переключение комплектов (обрабатывается только пассивным комплектом);
• виртуальные команды, не управляющие реле, а воздействующие только на состояние переменной (виртуального объекта) в ТЗК ТС.
При управлении стрелкой осуществляется контроль ее текущего положения: если поступила команда перевести стрелку в плюсовое положение и стрелка имеет плюсовой контроль, то УВ на схему стрелки не будет сформировано. УВ применяется только для перевода стрелки в крайнее положение, при противоположном значении имеющегося контроля, а также при его отсутствии для реверсирования стрелки.
Каждая стрелка может быть логически заблокирована для управления. В этом случае команды индивидуального или маршрутного управления не будут выполняться до снятия блокировки. Блокировка стрелки и ее снятие выполняются простыми командами ТУ без подачи УВ в управляющую цепь стрелки.
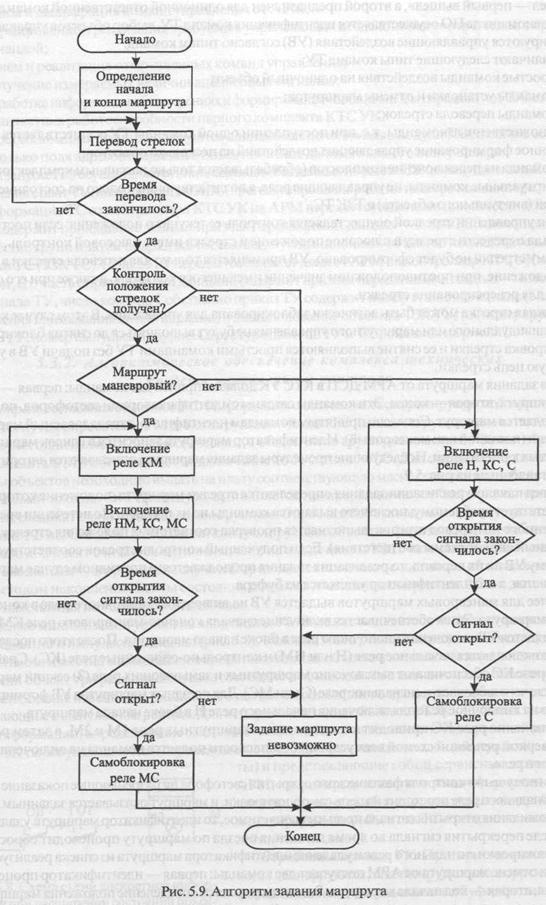
Для задания маршрута от АРМ ДСП в КТС УК должны прийти две команды: первая — начало маршрута, вторая—конец. Эти команды связаны с идентификаторами светофоров, по которым задается маршрут. Согласно принятым командам идентифицируется задаваемый маршрут и его тип (поездной или маневровый). Идентификатор маршрута заносится в список маршрутов принятых к реализации. Последующие процедуры задания маршрута описываются алгоритмом, представленным на рис. 5.9.
Теоретические основы построения и эксплуатации микропроцессорных систем автоматики... ОСНОВЫ ПОСТРОЕНИЯ МИКРОПРОЦЕССОРНЫХ... ЦЕНТРАЛИЗАЦИИ Причины применения микропроцессорных...
Причины применения микропроцессорных централизации на станциях
Существуют две главные причины необходимости внедрения в настоящее время микропро-цессорных и релейно-процессорных централизации на станциях Российских железных дорогПервая причина заключается в то
Безопасность систем микропроцессорных централизации
ЭЦ является безопасной системой, поскольку обеспечивает безопасность передвижения подвижного состава на станциях.
Безопасность технического объекта рассматривается как свойство объекта, на
Функциональная структура
Система ЭЦ-МПК обеспечивает автоматизацию задания маршрутов, управления и контроля за объектами на станции. ЭЦ-МПК является современной, открытой, наращиваемой, легко адаптируемой к условиям конкре
Структура программного обеспечения
Программное обеспечение (ПО) ЭЦ-МПК состоит из ПО АРМ и ПО контроллера КТС УК. Каждая часть включает (рис. 5.6):
• системное ПО;
•прикладное ПО.
ПО АРМ содержит исполняем
Функциональная структура системы
РПЦ «Диалог-Ц» разработана и предназначена для оборудования или замены существующих постов ЭЦ при полной или частичной реконструкции, а также для подключения станционных устройств к системам ДЦ, ДК
Этапы развития системы
Первая отечественная система микропроцессорной централизации (МПЦ) была введена в эксплуатацию в 1997 г. на ст. Шоссейная Октябрьской ж.д. В качестве технической основы для реализации функций ЭЦ ра
Эксплуатационно-технические характеристики
Система ЭЦ-ЕМ предназначена для централизованного управления объектами низовой и локальной автоматики (стрелками, сигналами, переездами и т.д.) на железнодорожных станциях с целью организации движ
Функциональная структура системы
С точки зрения функционального назначения в системе ЭЦ-ЕМ можно выделить четыре основных подсистемы (рис. 7.3):
•диалоговую;
•диагностики;
Техническая структура
Технической основой системы ЭЦ-ЕМ является специализированный комплекс УВК РА. Структура технических средств системы приведена на рис. 7.4. В состав УВК входят:
• центральное постовое устр
Состав и функционирование центрального постового устройства
В состав ЦПУ входят три идентичных субблока ЦПУ (СЦПУ). Каждый субблок выполнен в виде модуля контроллера МК, реализованного в конструктиве «Евромеханика 6 U». Модуль контроллера содержит:
Назначение и принципы построения периферийных устройств УВК РА
Периферийное устройство (ПУ) УВК РА служит для сопряжения ЦПУ с объектами низовой и локальной автоматики ОУ для станций с количеством централизованных стрелок до 50. Для станций с количеством центр
Этапы развития систем Ebilock- 950
В период с 1990 по 1995г. было предпринято несколько попыток внедрить на сети железных дорог Российской федерации зарубежные системы МПЦ. Это стремление было продиктовано прежде всего желанием на п
Эксплуатационно-технические характеристики системы.
Система Ebilock-950 адаптирована к условиям эксплуатации на Российских ж.д., поэтому её основные эксплуатационно-технические характеристики соответствуют требованиям, предъявляемым
Структура системы
Структура компьютера централизации приведена на рис.8.2. С точки зрения функционального назначения в системе Ebilock-950 можно также выделить четыре основных подсистемы:
§ диалоговая подси
Аппаратные средства ПМЦ
Аппаратная компановка ПМЦ приведена на рис.8.3. ПМЦ состоит из модулей, установленных в 19-ти дюймовый корпус, содержащий пассивную объединительную плату для межмодульной связи и распределения пита
Структура аппаратных средств процессорного модуля
Структура аппаратных средств процессорного модуля представлена на рис.8.3. Процессорный модуль централизации Interlocking Processing Unit (IPU) - содержит два синхронно работающих процессорных блок
Общее описание
Система объектных контролеров (СОК 950) является составной частью микропроцессорной централизации Ebilock-950. Применение распределенной структуры объектных контроллеров позволяет разместить их в н
Конструктивное исполнение СОК
Рекомендуемые шкафы для размещения объектных контроллеров системы СОК 950 представляют собой пару соединенных между собой шкафов рис 8.6. Каждый из них предназначен для установки стандартной 19” ст
Функции объектных контроллеров.
Сигнальный объектный контроллер управляет сигнальными показаниями и контролирует состояния светофорных ламп, обеспечивая при этом:
· Снижение сигнальных показаний. Включение более запрещаю
Безопасность процесса управления.
Требования по безопасности при реализации процесса управления удовлетворяются применением принципа, который широко используется в системах, ответственных за безопасность, это принцип диверситета (в
Определение состояния контактов реле.
Изменение состояния напольных устройств из одного состояния в другое осуществляется посредством переключения механических контактов. Такими устройствами являются реле, которые используются в аппара
Принципы идентификации
В соответствии с требованиями по безопасности для каждого контроллера должны быть идентифицированы:
- система связи с контроллером - телеграммы, которые он способен принимать и передавать;
Программное обеспечение системы Ebilock-950
Одной из наиболее важных составляющих системы МПЦ Ebilock-950 является программное обеспечение (ПО). В документации на систему базовая программно-аппаратная платформа CBI-950 рассматривается как на
Электропитание системы МПЦ Ebilock-950
Система питания МПЦ разработана в соответствии с общими для Российских ж.д. принципами построения систем питания ЭЦ. Вместе с тем имеются некоторые отличия. Структурная схема питания показана (рис
Устройства заземлении, грозозащиты и защиты от перенапряжений.
Центральный пост МПЦ (ЦП) и микропроцессорные посты в горловинах (МОК) располагаются не ближе 5м от контактного провода для исключения возможности падения на них контактного провода, что позволяет
Хотите получать на электронную почту самые свежие новости?
Подпишитесь на Нашу рассылку
Наша политика приватности обеспечивает 100% безопасность и анонимность Ваших E-Mail







Новости и инфо для студентов