рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Менеджмент
- /
- Типовые динамические звенья и их характеристики.
Реферат Курсовая Конспект
Типовые динамические звенья и их характеристики.
Типовые динамические звенья и их характеристики. - раздел Менеджмент, Объект управления – некий элемент, состояние которого нас интересует, и на который мы можем целенаправленно воздействовать, изменяя его состояние В Структурных Схемах Изображается, Как Правило, Элементарные Или Типовые Звен...
В структурных схемах изображается, как правило, элементарные или типовые звенья. Элементарные – это звенья, которые показывают такой алгоритм преобразования сигналов, который нельзя заменить более простым. Такие звенья имеют не выше чем второй порядок и их делят на следующие группы:
1) инерционные и безинерционные
2) алгебраические и трансцендентные (неалгебраические)
3) минимальнофазовые и неминимальнофазовые
Безинерционные звенья:
1) Пропорциональные (идеально усилительное) звенья. Передаточная функция такого звена:
 , где k – коэффициент передачи или усиления. Импульсная и переходная характеристики представляют собой усиленные в k-раз единичный ступенчатый сигнал или дельта-функция.
, где k – коэффициент передачи или усиления. Импульсная и переходная характеристики представляют собой усиленные в k-раз единичный ступенчатый сигнал или дельта-функция.
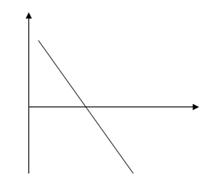
2) Дифференциальное звено. Описывается:  ; передаточная функция
; передаточная функция 
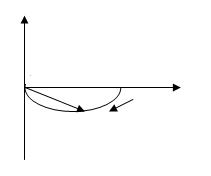
3) Интегрирующее звено (безинерционные). Описывается двумя уравнениями: 
 - упрощена (начальные условия). Интегрирующее звено зависит от начальных условий.
- упрощена (начальные условия). Интегрирующее звено зависит от начальных условий.

h(t)
t
Передаточная функция 
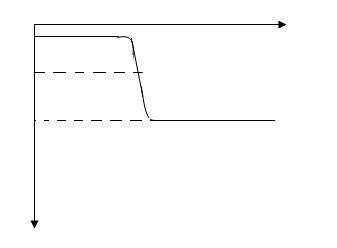
4) Инерционные звенья:
Апериодическое звено первого порядка:  - периодическая функция. T – постоянная времени, характеризует инерционность устройства, описываемая как апериодическое звено. Чем больше T, тем больше длительность переходного процесса.
- периодическая функция. T – постоянная времени, характеризует инерционность устройства, описываемая как апериодическое звено. Чем больше T, тем больше длительность переходного процесса.
Для дифференцирующего звена W(s) = ks

 ФЧХ
ФЧХ
ЛАЧХ


Интегрирующее звено

ФЧХ
ω

φ(ω)
ЛАЧХ
 L(ω)
L(ω)

Ω
1) АФЧХ
U(ω)
 ω=0
ω=0
v(ω)
ω
2) АЧХ
 A(ω)
A(ω)

k

ω
3) ФЧХ
 (частота сопряжения)
(частота сопряжения)
ω

φ(ω)
4) ЛАЧХ
Т.к. частоты, на которых работает устройство могут быть очень велики, то во втором вычитаемом влияние единицы велико и можно воспользоваться упрощенным уравнением:

Такое уравнение позволяет воспользоваться ассимптотичесим ЛАЧХ.
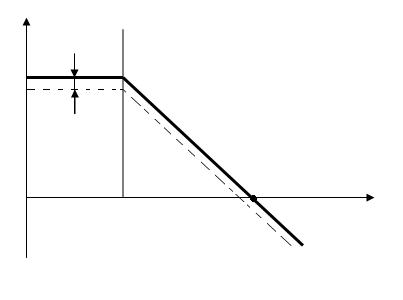 Ассимтотическая ЛАЧХ:
Ассимтотическая ЛАЧХ:
L(ω)
3Дб – ошибка
20lg k

При анализе САУ такой ошибкой (3Дб) пренебрегают (т.е. в 30 раз)
Таким звеном описываются фильтры низких частот (звенья, которые эффективно отрабатывают низкие сигналы), RC цепочки, нагревательные объекты (теплообогреватели), двигатели.
– Конец работы –
Эта тема принадлежит разделу:
Объект управления – некий элемент, состояние которого нас интересует, и на который мы можем целенаправленно воздействовать, изменяя его состояние
В процессе управления выделяют два элемента... объект управления...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Типовые динамические звенья и их характеристики.
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.018 сек.
Новости и инфо для студентов