рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Менеджмент
- /
- Астатическое/статическое регулирование.
Реферат Курсовая Конспект
Астатическое/статическое регулирование.
Астатическое/статическое регулирование. - раздел Менеджмент, Объект управления – некий элемент, состояние которого нас интересует, и на который мы можем целенаправленно воздействовать, изменяя его состояние Сар Подразделяют На Статические И Астатические В Зависимости От Того, Имеют Л...
Сар подразделяют на статические и астатические в зависимости от того, имеют ли они или нет ошибку в установившемся состоянии при определенного рода воздействиях.
Статическая система – это система, в которой всегда присутствует ошибка управления.
Основные характеристики: равновесие системы статического регулирования может быть при различных значениях регулируемой величины; каждому значению регулируемой величины соответствует единственное определенное значение регулирующего органа; контур регулирования системы должен состоять из статических звеньев, осуществляющих зависимость хвых = f(xвх)
Примером статической системы является Рис. 1 (см. выше)
Астатическая система – это система, в которой ошибка управления стремится к нулю.
Основные характеристики: равновесие системы астатического регулирования имеет место при единственном значении регулируемой величины, равной заданному; регулирующий орган в астатической системе должен иметь возможность занимать различные положения при одном и том же значении регулируемой величины.
Примером астатической системы является Рис. 2 (см. выше)
В астатических системах обязательно присутствует астатический элемент, которому безразлично положение равновесия. На Рис. 2 таким элементом является двигатель.
Следует различать системы статические и астатические по отношению к возмущающему и управляющему воздействиям. В системах, статических по отношению к возмущающим воздействиям, не одинаковым по постоянной величине, возмущающим воздействиям соответствует различное значение регулирующей величины. В астатических системах по отношению к возмущающим воздействиям значение регулируемой величины не зависти от величины возмущающего воздействия. Значение регулируемой величины остается постоянным, равным заданному.

Переходные процессы в статической (кривая 1) и астатической (кривая 2) системах по отношению к возмущающему воздействию.
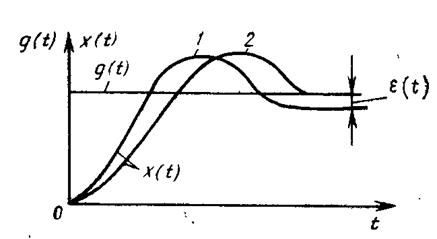
Переходные процессы в статической (кривая 1) и астатической (кривая 2) системах по отношению к управляющему воздействию.
Несвязанные/связанные САР
В связанных САР для регулирования различных величин применяют регуляторы, связанные друг с другом. В таких системах связи могут быть таковы, что изменение одной из регулируемых величин не приводит к выключению остальных регуляторов. Такие САР называют автономными.
В несвязанных САР регуляторы не связаны друг с другом, хотя имеют общий объект управления.
Несвязанные САР бывают: зависимые и независимые. В независимых изменение одного из параметров не приводит к изменению остальных величины. В зависимых – приводит.
– Конец работы –
Эта тема принадлежит разделу:
Объект управления – некий элемент, состояние которого нас интересует, и на который мы можем целенаправленно воздействовать, изменяя его состояние
В процессе управления выделяют два элемента... объект управления...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Астатическое/статическое регулирование.
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.019 сек.
Новости и инфо для студентов