рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Менеджмент
- /
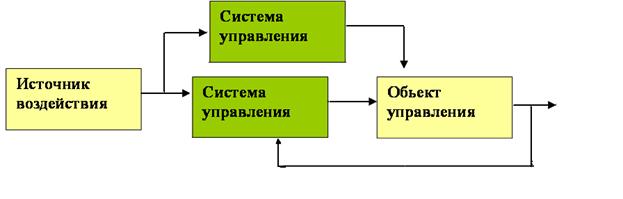
- В) комбинированное
Реферат Курсовая Конспект
В) комбинированное
В) комбинированное - раздел Менеджмент, Объект управления – некий элемент, состояние которого нас интересует, и на который мы можем целенаправленно воздействовать, изменяя его состояние ...
Лучше применять такую систему, если:
1) есть точное описание системы
2) есть уверенность в постоянстве свойств объекта
3) незначительность или отсутствие помех.
Достоинства:
1) дешевизна
2) проста в реализации
3) надежная
Недостатки:
1) низкая точность
2) ошибка, возникающая в процессе управления всегда неизвестна.
Такая система не знает состояния среду и своего объекта.
Принцип компенсации (управление по возмущению)

Недостатки:
1) необходимо постоянное измерение или априорного задания возмущения
2) информация о состоянии объекта не используется
Регулируемая величина – управляемый параметр.
Задающее воздействие определяет значение к которому должна стремится регулируемая величина.
Возмущающее воздействие - влияет на процесс (объект управления) нежелательным и, в большинстве случаев, непредсказуемым образом.
Воздействие, которое оказывает регулирующий орган на объект управления через исполнительный механизм.
2) По назначению:
1) система автоматической стабилизации – система, в которых задающее воздействие x(t) = const
2) система программного управления – система, в которой сигнал x(t) есть заранее известная функция времени
3) следящая система – система, в которой сигнал x(t) заранее неизвестная функция времени
3. По способу математического описания:
1) линейные
2) нелинейные
4. По виду сигналов:
1) непрерывные
2) дискретные
Основная задача создания системы управления – выполнение шагов при проектировании.

Функциональная схема системы управления:

В общем виде процесс управления предлагает наличие двух объектов:
- объекта управления
- системы управления или регулятора
Регулятор представляет собой набор определенных устройств и объектов, которые отличаются по функциональному признаку и часто имеют определенное положение в регуляторе.
Развернутая схема регулятора назначается функциональной САУ:
1) Задающее устройство вырабатывает сигнал функции, связанный с регулируемой величиной.
2) Сравнивающее устройство вырабатывает сигнал ошибки ε(t); в результате сравнения сигнал на входе с сигналом главной обратной связи.
3) Преобразующее устройство преобразует сигнал одной физической природы в другую, т.е. перемещение тока (напряжения).
4) и 8) Корректирующие устройства (последовательные, параллельные) предназначены для коррекции (улучшения) свойств системы (улучшение устойчивости, точности, быстродействия и др.)
5) Вспомогательное сравнивающее устройство. Сравнивает сигнал в промежуточной точке основной цепи, передача данных сигналом местной обратной связи.
6) Усилительное устройство. Предназначено для усиления сигнала по мощности и уровню.
7) Исполнительное устройство. Оказывает непосредственное воздействие на объект управления через регулирующий орган. Если исполнительное устройство непосредственно связано с регулирующим органом и оказывает механическое воздействие, то его часто называют сервомотором.
9) Чувствительный или измерительный элемент, предназначенный для преобразования регулируемых величин или помех в сигналы, удобные для дальнейшего использования в контуре управления.
10) Элемент главной обратной связи. Вырабатывает сигнал, находящийся в определенной функциональной зависимости от регулируемой переменной.
Реальные технические устройства могут выполнять несколько функций (усиление, изменение, сравнение)
I) часть системы, которая выражает сигнал ошибки – датчик регулятора.
II) Часть системы, которая выражает регулирующее воздействие, называемое сервомеханизмом.
– Конец работы –
Эта тема принадлежит разделу:
Объект управления – некий элемент, состояние которого нас интересует, и на который мы можем целенаправленно воздействовать, изменяя его состояние
В процессе управления выделяют два элемента... объект управления...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: В) комбинированное
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.018 сек.
Новости и инфо для студентов