рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Образование
- /
- Шарнирный четырехзвенник
Реферат Курсовая Конспект
Шарнирный четырехзвенник
Шарнирный четырехзвенник - раздел Образование, Теория механизмов и машин Рассмотрим Шарнирный Четырехзвенник (Рис.2.27), Который Наход...
Рассмотрим шарнирный четырехзвенник (рис.2.27), который находится в равновесии под действием заданных моментов: движущего Мдв на ведущем звене 1 и момента
сопротивления Мс на ведомом звене 3.
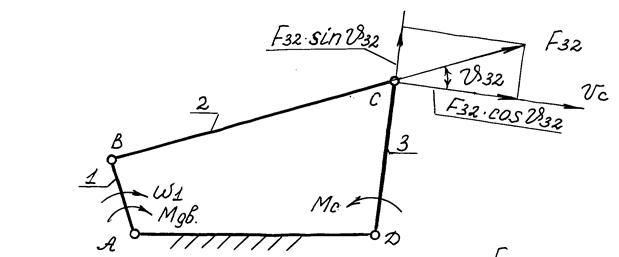
Рис.2.27
Если не учитывать силы тяжести звеньев, силы инерции и силы трения, то линия действия силы  F32 совпадает с линией шатуна 2 (при обозначении реакций между звеньями в кинематических парах первая цифра индекса обозначает номер звена, на которое действует эта реакция, вторая – номер звена, со стороны которого действует реакция. Так, F32- это сила, действующая на звено 3 со стороны звена 2).
F32 совпадает с линией шатуна 2 (при обозначении реакций между звеньями в кинематических парах первая цифра индекса обозначает номер звена, на которое действует эта реакция, вторая – номер звена, со стороны которого действует реакция. Так, F32- это сила, действующая на звено 3 со стороны звена 2).
Таким образом, углом давления в шарнирном четырехзвеннике является угол  32 между линией шатуна 2 и скоростью точки С, которая направлена перпендикулярно к коромыслу 3. Этот угол давления характеризует соотношение между полезной составляющей силы F32, преодолевающей момент сопротивления Мс (т.е. сила F32 . cos32), и полной силой F32. Вторая составляющая F32.sin32 растягивает (или сжимает) ведомое звено. Из условия равновесия звена 3 Мс=F32 . cos32 .
32 между линией шатуна 2 и скоростью точки С, которая направлена перпендикулярно к коромыслу 3. Этот угол давления характеризует соотношение между полезной составляющей силы F32, преодолевающей момент сопротивления Мс (т.е. сила F32 . cos32), и полной силой F32. Вторая составляющая F32.sin32 растягивает (или сжимает) ведомое звено. Из условия равновесия звена 3 Мс=F32 . cos32 .  3 следует, что
3 следует, что
F32=Мс/(3 сos32)
Согласно этой формуле с увеличением угла давления для преодоления одного и того же момента сопротивления к ведомому звену требуется прикладывать большую силу. Это приводит к увеличению реакций во всех кинематических парах и, как следствие, к увеличению потерь на трение и к меньшему КПД.
При движении механизма угол давления меняется. Экстремальных значений угол давления в шарнирном четырехзвеннике достигает в положениях, когда кривошип располагается на линии стойки по обе стороны от шарнира А (рис. 2.28).
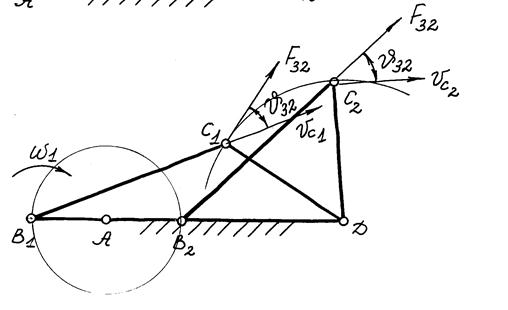
Рис. 2.28
Кривошипно-ползунный механизм
При ведомом ползуне 3 угол давления – это угол между линией шатуна и направляющей стойки (рис. 2.29,а).
Для преодоления силы сопротивления Fc вдоль шатуна должна действовать сила F32. Из условия равновесия ползуна Fc=F32 . cos следует, что F32=Fc/cos32. Экстремальных значений угол давления достигает, когда кривошип располагается перпендикулярно линии направляющих стойки.
следует, что F32=Fc/cos32. Экстремальных значений угол давления достигает, когда кривошип располагается перпендикулярно линии направляющих стойки.
При ведомом кривошипе 1 (рис. 2.29,б) углом давления 12 является угол между осью шатуна 2 и перпендикуляром к кривошипу 1. При этом угол давления 12 дважды за оборот кривошипа достигает значения 900 и кривошип может проходить эти положения только счет кинетической энергии вращающихся масс.
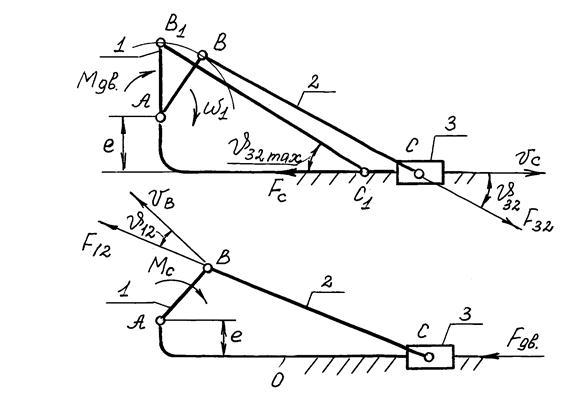
Рис.2.29а,б
Кривошипно-кулисный механизм
В аксиальном кулисном механизме (е=0) (рис. 2.30) при ведомой кулисе угол давления во всех положениях равен нулю, т.к. реакция в поступательной паре между шатуном 2 и кулисой 3 (без учета сил трения) направлена перпендикулярно направляющей, а скорость точки В звена 3 направлена перпендикулярно звену 3, т.е. они совпадают.
В дезаксиальном кривошипно-кулисном механизме (рис.2.31) при ведомом звене 3 угол давления определяется как32=arcsin е/ вс,где вс–расстояние между точками В и С.
вс,где вс–расстояние между точками В и С.
При больших углах давления в механизме может возникнуть самоторможение. Самоторможение – это явление, при котором ведомое звено не может быть приведено в движение, как бы велика не была приложенная к нему сила со стороны смежного подвижного звена.
При проектировании рычажных механизмов рекомендуется, чтобы при рабочем ходе угол давления не превышал:
а) при вращающемся ведомом звене: 45º - 50º;
б) при поступательно движущемся ведомом звене: 30º - 35º.
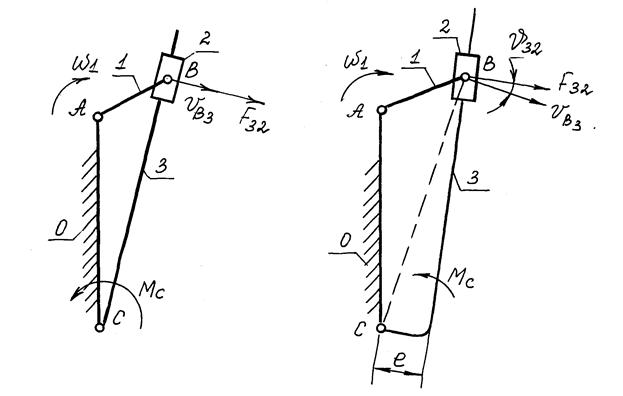
Рис.2.30 Рис.2.31
– Конец работы –
Эта тема принадлежит разделу:
Теория механизмов и машин
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Шарнирный четырехзвенник
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.013 сек.
Новости и инфо для студентов