рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Образование
- /
- Шарнирный четырёхзвенник
Реферат Курсовая Конспект
Шарнирный четырёхзвенник
Шарнирный четырёхзвенник - раздел Образование, Теория механизмов и машин Дано (Рис.2.6): J1, W1 = Const, L1, L...
Дано (рис.2.6): j1, w1 = const, l1, l2, l3, lo = lAD, ml [м / мм ].
Кинематическое исследование проводим, начиная с начального звена 1, а затем рассматриваем двухповодковую группу 2-3.
Скорость точки В VB = w1 • l1 направлена перпендикулярно АВ в сторону вращения кривошипа.
Из полюса Р плана скоростей проводим линию, перпендикулярную АВ и на ней откладываем отрезок Рв (рис. 2.7), изображающий скорость  в. Величина отрезка Рв выбирается произвольно. Масштабный коэффициент строящегося плана скоростей: будет равен:
в. Величина отрезка Рв выбирается произвольно. Масштабный коэффициент строящегося плана скоростей: будет равен:
mv = VB / Рв [м / с•мм]
Затем переходим к рассмотрению группы Ассура, состоящей из звеньев 2-3. Для этой группы известны скорости внешних кинематических пар  и
и  =0), поэтому для нахождения скорости точки С можно написать два векторных равенства, используя первый способ разложения движения :
=0), поэтому для нахождения скорости точки С можно написать два векторных равенства, используя первый способ разложения движения :
 С = В + СВ
С = В + СВ
С = Д + VСД
Совместное решение этих двух векторных уравнений позволяет найти скорость точки С. Для этого в соответствии с первым уравнением, из конца вектора Рв проводим линию, перпендикулярную ВС, а из полюса, поскольку скорость точки Д равна нулю и точка d находится в полюсе, проводим в соответствии со вторым уравнением линию, перпендикулярно ДС. В пересечении двух направлений относительных скоростей находим положение точки с, а следовательно и скорость VС.
После последующего построения плана скоростей найдем угловые скорости звеньев:
w2 = VСB / l2 = (cв) • mv / (CВ• ml ) [ 1 / c]
w3 = VСД / l3 = (Pc) • mv / (CД• ml ) [ 1 / c]
Для определения направления угловой скорости wi вектор относительной скорости необходимо перенести в соответствующую точку на звене – угловая скорость будет направлена в сторону этого вектора. Для рассматриваемого механизма направление угловой скорости w2 (рис. 2.8) определится вектором относительной скорости VСВ ,перенесенным в точку С.
План ускорений строим в той же последовательности, что и план скоростей, т.е. вначале рассматриваем начальное звено АВ, а затем группу Ассура 2-3.
При равномерном вращении кривошипа (w1 = cons) полное ускорение точки В определится как аВ = апВА = w12 lА , при этом аtВА=0, т.к. e1=0
|
|
|
|
|
|
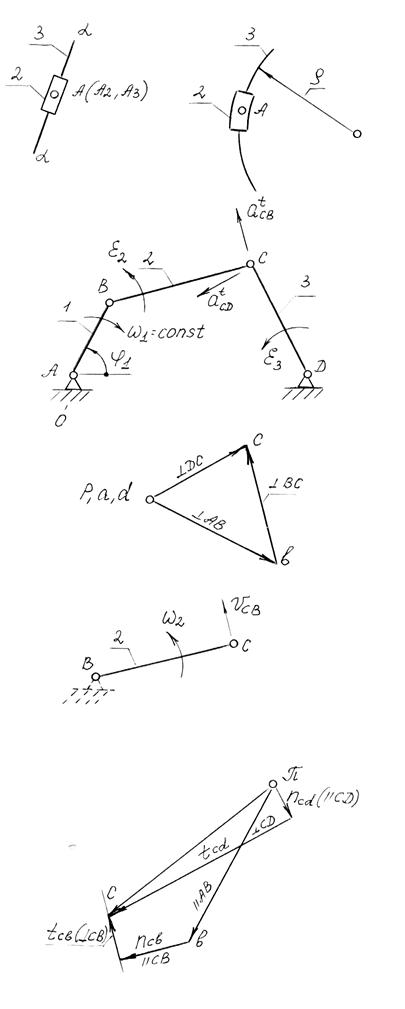
Рассматриваемое укорение направлено вдоль звена АВ, к центру вращения, т.е. от точки В к точке А. Выбираем точку p –полюс плана ускорений, и из нее проводим линию, параллельную АВ, на которой откладываем произвольный отрезок pв, изображающий ускорение точки В на плане ускорений (рис.2.9).
Масштабный коэффициент построения плана определится как
mа = ав / pв [м / с2•мм ]
Для определения ускорения точки С составим два векторных равенства:
 С =В + пСВ+
С =В + пСВ+ (1 способ разложения движения),
(1 способ разложения движения),
 (1 способ разложения движения).
(1 способ разложения движения).
Нормальные составляющие определяются в соответствии с уравнениями:
апСВ = V2СВ / lСВ = w22 • lСВ [м / с2 ],
апСД = V2СД / lСД = w23 • lСД [м / с2 ].
Отрезки, которыми изображаются эти величины на плане ускорений, определяются как
псв = апСВ / mа [мм ] псd = апСD / mа [мм ]
На механизме нормальное ускорение апСВ направлено от точки С к точке В, а ускорение апСД - от точки С к точке D. В соответствии с первым векторным равенством из конца вектора pв проводим линию, параллельную ВС, и на ней откладываем отрезок nсв, изображающий в масштабе mа нормальное ускорение апСВ. Вектор апСВ направлен от точки С к точке В. Из конца построенного вектора пСВ проводим линию, перпендикулярную СВ, т.е. направление тангенциальной составляющей.
Согласно второму векторному равенству из полюса p параллельно звену CD проводим линию направления нормального ускорения апСD. На ней откладываем отрезок псd и из его конца проводим перпендикулярно CD линию направления второй тангенциальной составляющей.
В пересечении указанных линий тангенциальных составляющих находим точку с. Соединив ее с полюсом p найдём вектор (pс), определяющий ускорение точки С. Тогда
аС = (pС) mа [м / с2 ]
Угловые ускорения e2 и e3 звеньев находятся из уравнений:
e2 = а tСВ / lСВ = (t CB) ma / (CB)m l [1 / с2 ]
e3 = а tСD / lСD = (t CD )ma / (CD) ml [1 / с2 ]
Для определения направления углового ускорения необходимо перенести вектор тангенциальной составляющей, например а tСВ , в соответствующую точку С звена ВС и этот вектор покажет направление углового ускорения e2 (рис.2.6).
Если w и e направлены в одну сторону, то движение звена ускоренное, если в противоположные, то замедленное.
– Конец работы –
Эта тема принадлежит разделу:
Теория механизмов и машин
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Шарнирный четырёхзвенник
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.025 сек.
Новости и инфо для студентов