рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Образование
- /
- Кривошипно-кулисный механизм
Реферат Курсовая Конспект
Кривошипно-кулисный механизм
Кривошипно-кулисный механизм - раздел Образование, Теория механизмов и машин Дано (Рис.2.13): J1, W1=Const, L1, ...
Дано (рис.2.13): j1, w1=const, l1, l0= lAC , ml[м/мм].
Точку В, принадлежащую первому звену, обозначим В1, второму - В2. Проекцию точки В на третье звено, кулису, обозначим В3. Скорости точек В1 и В2 одинаковы, т.е. V В1 = V В2, но w1 ¹ w2.
Звенья 2 и 3 связаны между собой поступательной парой. При этом V В2 ¹ V В3 и w2 =w3.
Скорость точки В1 кривошипа VВ1 = w1• lАВ направлена в сторону вращения звена, перпендикулярно линии АВ.
Для нахождения скорости точки В3 составим два векторных равенства:
 (2 способ разложения движения),
(2 способ разложения движения),
 ( 1 способ разложения движения).
( 1 способ разложения движения).
Совместное решение этих равенств определит скорость точки В3 (рис. 2.14). Масштабный коэффициент построения плана скоростей:
mn= VВ1 / Рв1 [м / с• мм ].
Ускорение точки В1 кривошипа aB1 = апВ1А = w12× lAВ направлено вдоль звена АВ от точки В к точке А.
Масштабный коэффициент плана ускорений:
mа = aB1 / pв1 [м/с2мм]
Ускорение точки В1 первого звена равно ускорению точки В2 второго звена, так как эти звенья соединены между собой шарнирно: .
.
Для определения ускорения точки В3 третьего звена составляем два векторных равенства:  В3 = В2 + кВ3В2 + r В3В2 (2 способ разложения движения)
В3 = В2 + кВ3В2 + r В3В2 (2 способ разложения движения)
В3 = С + а пВ3С + t В3С (1 способ разложения движения)
|
|
|
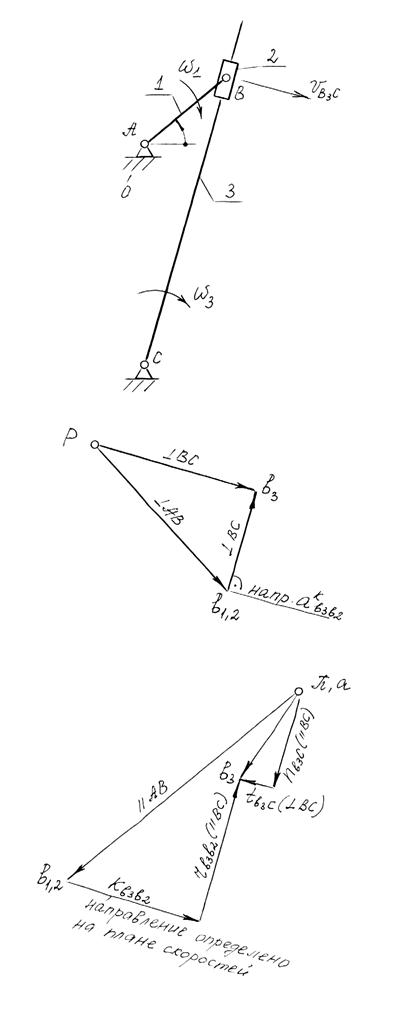
Совместное решение этих векторных равенств позволяет определить ускорение точки В3 (рис. 2.15).
Кориолисово ускорение а кВ3В2 определяется по формуле:
а кВ3В2 = 2w2 V В3В2 = 2w3 V В3В2 , где
w3 = VВ3/ lВС = (Рв3)mv / (BC ml ) [1 / c ],
V В3В2 = (в3в2) mv [м / c ]
Направление кориолисова ускорения находится поворотом вектора относительной скорости V В3В2 на 90° в сторону вращения направляющей поступательной пары, т.е. в сторону w3.
Для определения направления w3 вектор относительной скорости V В3С необходимо перенести в точку В кулисы. Этот вектор покажет направление w3. В результате для определения направления вектора а кВ3В2 вектор (в3в2) поворачиваем на 90° в сторону w3. Величина нормального ускорения равна:
а пВ3С = V 2 В3С / lВС = (Рв3) 2m 2v / (ВС ml ) [м / c2 ]
Отрезки, которыми изобразим а кВ3В2 и а пВ3С на плане, найдутся как:
 = а кВ3В2 / mа [мм]
= а кВ3В2 / mа [мм]  = а пВ3С / mа [мм].
= а пВ3С / mа [мм].
– Конец работы –
Эта тема принадлежит разделу:
Теория механизмов и машин
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Кривошипно-кулисный механизм
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.017 сек.
Новости и инфо для студентов