рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Физика
- /
- РАСЧЕТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ МЕТОДАМИ ПЕРЕМЕЩЕНИЙ И СМЕШАННЫМ
Реферат Курсовая Конспект
РАСЧЕТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ МЕТОДАМИ ПЕРЕМЕЩЕНИЙ И СМЕШАННЫМ
РАСЧЕТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ МЕТОДАМИ ПЕРЕМЕЩЕНИЙ И СМЕШАННЫМ - раздел Физика, СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫЕ СИСТЕМЫ § 7.1. Выбор Неизвестных В Методе Перемещении Как Уже Мы Выяснили (С...
§ 7.1. ВЫБОР НЕИЗВЕСТНЫХ В МЕТОДЕ ПЕРЕМЕЩЕНИИ
Как уже мы выяснили (см. гл. 6), при расчете статически неопределимой системы методом сил за лишние неизвестные принимаются усилия в лишних связях (силы и моменты). После определения лишних неизвестных легко могут быть найдены внутренние усилия (М, N, Q) в произвольном сечении и перемещения (прогибы и углы поворота) в любой точке конструкции. Следовательно, при расчете методом сил сначала находят усилия, а потом уже перемещения. Можно решить задачу иначе: сначала каким-либо путем найти перемещения, а потом установить соответствующее им распределение усилий. Именно так и поступают при расчете статически неопределимых систем методом перемещений. Принимая за лишние неизвестные упругие перемещения, пренебрегаем влиянием продольных и поперечных сил на деформации стержней, учитывая лишь деформации изгиба. Это допущение не является новым, так как при расчете рам методом сил влиянием продольных и поперечных сил при определении деформаций конструкции обычно пренебрегают. Кроме того, не делают различия между первоначальной длиной прямого стержня и длиной «хорды», стягивающей его упругую ли-
I нию. Иными словами, сближение концов такого стержня при его
' изгибе не учитывают.
! Установим теперь, какие перемещения стержня необходимо и
I достаточно знать, чтобы можно было определить внутренние усилия в любом его сечении. Для этого рассмотрим прямой стержень АВ (рис. 7.1, а), выделенный из какой-либо i раз статически неопреде-
I лимой системы. Под влиянием действующей на всю систему (в том числе и на стержень А В) нагрузки стержень А В изогнется и переместится в новое положение А 'В'. ; Любое положение А'В' стержня можно получить из начального
в результате следующих независимых перемещений: ■' 1) поступательного перемещения всех точек стержня на одну и ту же числовую величину Дд (рис. 7.1, б); при этом ось стержня остается прямолинейной, а изгибающие моменты и поперечные силы
| i |
Bo всех его сечениях равны нулю; 2) перемещения одного из защемленных концов стержня в направлении, перпендикулярном его оси, например, конца В на чис-у ловую величину АВА; вид упругой линии и эпюра М для такого ' случая изображены на рис. 7.1, в;
265
3) поворота конца А стержня на угол фд (рис. 7.1, г); , ■
4) поворота конца В стержня на угол срв (рис. 7.1, д);
5) перемещений точек оси стержня с двумя неподвижными и
защемленными концами от действия заданной нагрузки (рис. 7.1, е).
Очертание упругой линии стержня АВ в результате поступательного смещения Дд, перемещения конца В по отношению к А на Авд, поворота концевых сечений на срЛ и срв и действия нагрузки будет совпадать с упругой линией А'В' (рис. 7.1, а).

Если каким-либо путем удастся найти величины Авд, срА и фв, то этого будет достаточно для определения М и Q в любом сечении стержня (наличие поступательного смещения АА не вызывает в нем моментов и поперечных сил). Эти перемещения (Двд, фА и фв) и следует принять за неизвестные при рассмотрении отдельного стержня.
В стержневых системах (рамах) линейные перемещения (и углы поворота) концов стержней, жестко соединенных в узле, равны между собой. Поэтому за неизвестные при расчете статически неопределимых систем методом перемещений принимаются углы поворота узлов и их линейные перемещения.
§ 7.2. ОПРЕДЕЛЕНИЕ ЧИСЛА НЕИЗВЕСТНЫХ
При расчете статически неопределимой системы методом перемещений первоначально необходимо установить общее число неизвестных величин, подлежащих определению. Выше было показано, что за неизвестные принимаются углы поворота и линейные смещения узлов системы; следовательно, общее число неизвестных п будет
равно сумме чисел неизвестных углов поворота узлов пу и неизвестных линейных перемещений узлов пл, т. е.
п=яу+гсл.
Число неизвестных углов поворота равно числу «жестких» узлов, а потому определение пу сводится к простому подсчету числа «жестких» узлов рамы г.
«Жестким» считается такой узел, в котором концы, по крайней мере, двух из сходящихся в нем стержней жестко связаны между собой (например, узлы /, 2, 3, 4 на рис. 7.2, а; узлы 1, 2 на рис. 7.2, е; узел 1 на рис. 7.2, ж).
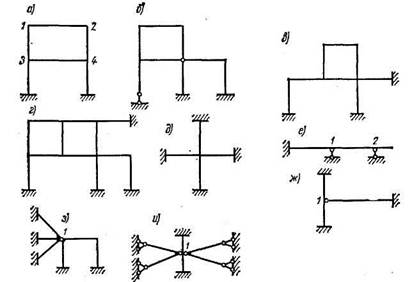
Если стержни, сходящиеся в каком-либо узле системы, соединены в несколько жестких групп, шарнирно связанных между собой, то такой узел имеет количество «жестких» узлов, равное числу групп. Например, узел 1 на рис. 7.2, з имеет два «жестких» узла, узел 1 на рис. 7.2, и — три «жестких» узла. На рис. 7.2, 6, в, г, д рекомендуется самостоятельно определить число «жестких» узлов.
Перейдем к определению числа неизвестных линейных смещений. Выше (см. §7.1) было принято не учитывать деформации рам от действия продольных и поперечных сил и не делать различия между первоначальной длиной прямого стержня и длиной хорды, стягивающей его упругую линию, т. е. считать, что первоначальное расстояние между концами каждого прямого стержня сохраняется
 1 При подсчете числа «жестких» узлов не включаются узлы, угловые перемещения которых заданы, например жесткие закрепления, связывающие систему с «землей»,
1 При подсчете числа «жестких» узлов не включаются узлы, угловые перемещения которых заданы, например жесткие закрепления, связывающие систему с «землей»,
и после деформации. Это позволяет при определении числа линейных неизвестных смещений заменить схему данной статически неопределимой системы ее шарнирной схемой путем введения полных шарниров во все узлы и опорные закрепления. Перемещения всех узлов такой системы не являются независимыми, так как смещение одного из них может вызывать смещения ряда других узлов. Необходимо выделить из них независимые перемещения.
Число независимых линейных смещений узлов системы равно числу стержней, которое необходимо ввести в шарнирную схему сооружения, чтобы превратить ее в геометрически неизменяемую. Следовательно, число независимых линейных смещений узлов равно степени геометрической изменяемости системы, полученной из заданной путем введения во все «жесткие» узлы (включая и опорные) полных шарниров.

В качестве примера рассмотрим раму, изображенную на рис. 7.3, а. Число «жестких» узлов этой рамы равно двум, т. е. я =2. Для определения числа неизвестных линейных смещений переходим к шарнирной схеме (рис. 7.3, б), представляющей собой изменяемую систему; для превращения ее в геометрически неизменяемую достаточно поставить один стержень, например опорный СЕ (рис. 7.3, в) или диагональный АС (рис. 7.3, г). На рис. 7.3, б штриховой линией показаны возможные перемещения сторон шарнирного четырехугольника; из рассмотрения этого рисунка видно, что шарниры (узлы) В и С не могут перемещаться независимо друг от друга. Итак, число независимых линейных перемещений в дан-
– Конец работы –
Эта тема принадлежит разделу:
СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫЕ СИСТЕМЫ
На сайте allrefs.net читайте: Составим следующее равенство работ для двух состояний системы — действительного (рис. 5.34, а) и единичного (рис. 5.34, б):...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: РАСЧЕТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ МЕТОДАМИ ПЕРЕМЕЩЕНИЙ И СМЕШАННЫМ
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.019 сек.
Новости и инфо для студентов