рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Физика
- /
- Кинематическая неопределимость рам
Реферат Курсовая Конспект
Кинематическая неопределимость рам
Кинематическая неопределимость рам - раздел Физика, СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫЕ СИСТЕМЫ Общие Сведения. До Сих Пор Мы Рассматривали Расчет Различных Статически Неоп...
Общие сведения. До сих пор мы рассматривали расчет различных статически неопределимых систем по методу сил, принимая за основные неизвестные силы или моменты.
Если при расчете статически неопределимых систем по методу сил выбирают силы (усилия в лишних связях) и для их отыскания используют уравнения совместимости перемещений, причем применяют обычно основную геометрически неизменяемую систему, то при расчете по методу перемещений за неизвестные принимают перемещения, а для их нахождения используют условия равновесия. В случае свободной, незакрепленной рамы шарнирная схема рамы (полученная введением во всех жестких узлах полных шарниров) используется для установления числа неизвестных перемещений.
Метод перемещений в настоящее время получил большое распространение, особенно при расчете сложны* статически неопределимых систем с большим количеством лишних связей, обладающих малой подвижностью узлов (сложные каркасные рамы, фермы с жесткими узлами и т. д.). Метод перемещений явился основой для разработки ряда ценных приближенных методов расчета рам (метод Кросса, Кани и др.).
Существуют две формы решений задач по методу перемещений: каноническая и развернутая. Развернутая форма применена Геле-ром, Манном, Б. Н. Жемочкиным, Н. В. Корноуховым, автором и распространена за рубежом.
Каноническая форма метода перемещений аналогична той же форме записи уравнений метода сил. Она развита у нас трудами И. М. Рабиновича, А. А. Гвоздева и А. Ф. Смирнова.
Степень кинематической неопределимости. Степенью кинематической неопределимости условимся называть число тех неизвестных перемещений, знание которых позволяет определить деформированный вид системы и, следовательно, при применении закона Гука — все усилия в ней.
Степень кинематической неопределимости может не совпадать со степенью статической неопределимости. Для установления степени кинематической неопределимости необходимо рассмотреть особенности деформаций рам. При представлении деформированного состояния рам будем пренебрегать, как это принималось и при расам
|
чете рам методом сил: фчцэодольными деформациями, вызванными осевыми силами в стержнях (влиянием N); 2) разницей длин искривленного стержня и проекций его на первоначальное направление стержня; 3) влиянием поперечных сил на деформацию. При расчете .
же на действие температуры про- / р
дольные деформации учитываются. и 2^4—^/ 1 Рп
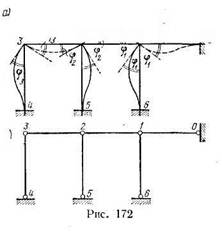
При указанных выше предпо-I ложенияхдля плоской рамы (рис. / I 172, а), каждый узел которой •' I прикрепляется последовательно к I двум другим узлам двумя стерж-I нями, не лежащими на одной пря-I мой, линейные смещения узлов от- ^ I сутствуют. В самом деле, стержни J |рамы считаются нерастяжимыми, в а система ее узлов образует тре-R угольники (/—6—0, 2—5—/, 3— |—4—2), длины сторон которых не Ц меняются и потому линейных сме-
Р 1ПРНИИ HP ПППИГХПТТИТ. ППИ ЭТОМ
«Г Щении не 1фиш_лиди1. при oiuivi
j|. шарнирная схема рамы (рис. 172,6) неизменяема. Такие рамы f шарнирная схема которых неизменяема, относятся к первому виду закрепленных, или несвободных, рам. Расчет рам этого t вида особенно прост по методу перемещений. За неизвестные пере-щ мещения, определяющие всю картину деформаций рамы и, следова-1 тельно, все усилия в системе, для рам этого типа принимают углы if поворота жестких свободных узлов. Для рамы, изображенной на рис. 172, а, эти углы обозначены ц>г, <р2 и ср3. Кине-'матическая неопределимость системы для этого случая равна трем. При расчете, как обычно, исходят из предположения об абсолютно жестком взаимном соединении стержней в узле; концы всех стерж-' ней, связанных в данном жестком узле (/, 2, 3), поворачиваются 'поэтому на один и тот же угол (рис. 172, а).
Ко второму общему виду рам относятся рамы, имеющие линей-'ные смещения узлов. Такие смещения возникают вследствие Г того, что в рамах этого типа нет последовательного прикрепления каждого узла двумя стержнями и, следовательно, шарнирная схема | рамы изменяема. В качестве примера рассмотрим простейшую раму прямоугольного очертания (рис. 173, а). Идя слева направо, заме-■'■ чаем, что узел / рамы прикреплен лишь одним вертикальным [ стержнем, почему для этого случая возможно горизонтальное пере-■* мещение узла Д = / — V (нет горизонтального закрепления). Узел 2 рамы прикреплен двумя стержнями 1—2 и 2—4, и так как узел / 1 перемещается, то узел 2 также получает линейное смещение 2—2'. Смещения узлов 2 и / должны быть одинаковыми, поскольку стержень принят нерастяжимым: 2—2'= 1—Г = А. Деформированный вид рамы, так же как и для предыдущего типа, характерен тем, ' что проекции искривленных линий каждого стержня на первона-
галс



чальное направление равны начальным длинам стержней и узлы рамы остаются жесткими — углы (р1 или ф2 одинаковы для концов ригелей и концов стоек.
Для рамы данного типа за неизвестные при расчете методом перемещений принимают как углы поворота жестких узлов ф, и ф2, так и линейные смещения узлов А. В данном случае мы получили одно неизвестное линейное смещение А, и нетрудно видеть, что шарнирная схема рамы (рис. 173, б) имеет одну степень свободы в отношении произвольных линейных смещений. Действительно, для обращения шарнирной схемы в неизменяемую систему необходимо ввести один дополнительный опорный стержень /.
Степень свободы шарнирной схемы рамы всегда совпадает с числом неизвестных линейных смещений узлов заданной рамы или со

|
степенью линейной подвижности узлов рамы. Это позволяет легко установить число неизвестных линейных смещений узлов А или пропорциональных им углов поворота стержней 0 (на рис.
173, a 0 = A//i) для любой
рамы.
Рассмотрим, например, раму, изображенную на рис.
174, а. Переходя к шарнир
ной схеме рамы (рис. 174,
б), получаем кинематическую
цепь стержней 1—2, 2—3,
3—4, 4—7 —систему с двумя
степенями свободы (в отно
шении линейных смещений).
К этому заключению прихо
дим, устанавливая число до
бавочных опорных стержней,
необходимых для обращения
шарнирной схемы в неиз-
| меняемую. Для этого прежде всего нужно закрепить узел / доба-| вочным опорным стержнем / (кроме стержня )—5); узел 2 теперь '','., прикреплен неподвижно двумя стержнями 1—2 и 2—6; для за-. крепления узла 3 следует ввести дополнительный опорный стер-I жепь //, после чего узел 3 оказывается прикрепленным двумя . стержнями; двумя стержнями прикреплен и узел 4.
Использование кинематической цепи—шарнирной схемы рамы — важно и для установления неизвестных линейных смещений узлов, точнее, взаимных смещений концов стержней данной рамы или неизвестных углов поворота стержней рамы Э в картине ее перекоса. |, Картиной перекоса рамы называют многоугольную линию, вершинами которой являются центры узлов рамы в деформирован-! ном состоянии (на рис. 174, а это контур 5—Г—2'—3'—4'—7). | Так как в шарнирной схеме дополнительным стержнем подкреп- лен узел /, то первым неизвестным линейным смещением явля-% ется Ах — смещение узла if относительно узла 5 в направлении, пер-! пендикулярном стержню 1—5. Поскольку же второй подкрепляющий * стержень дан в узле 3, вторым неизвестным линейным смещением '; следует выбрать смещение А2 узла 3 относительно узла 2 по нор-I мали к первоначальной оси стержня 2—3. Положение дополни-;'■■ тельных опорных стержней дает возможность установить, взаимные ; смещения концов каких именно стержней следует прини-| мать за неизвестные (в данном случае стержней 1—5 и 2—3). Щ. Вместо взаимных линейных смещений концов стержней в развер-|у нутой форме метода перемещений целесообразно принимать углы ©"поворота стержней рамы в картине перекоса (точнее, углы | поворота хорд изогнутых линий стержней). Эти углы, очевидно, I линейно связаны со смещениями:

где 11Ь, 1М—первоначальные длины стержней.
Если теперь нанести на картину перекоса рамы искривленные линии стержней, то углы 6 будут углами поворота хорд изогнутых линий стержней рамы. Введение в качестве неизвестных углов 9 особенно удобно для представления деформированного вида рамы, когда естественно сопоставление углов поворота стержней 9 с углами поворота узлов ф. Это одно из преимуществ развернутой формы метода перемещений.
Для рассмотренных свободных рам за неизвестные по методу перемещений в развернутой форме принимают: 1) углы поворота жестких свободных узлов и 2) углы поворота тех стержней рамы, положение которых определяет ее картину перекоса. Так, для рамы, изображенной на рис. 174, а, неизвестными угловыми перемещениями будут четыре угла поворота узлов фх, ф2, ф3иф, и два угла поворота стержней QL и 02. Для зависимых углов поворота 03 и 94 получаем:

 |

|

|
Мы получили выражение концевого момента в зависимости лишь от одного угла поворота жесткого узла q>t и угла смещения Qtk. Угол поворота касательной в месте шарнирного прикрепления в данном случае знать не требуется, поэтому в дальнейшем при расчете рам, имеющих и жесткие и шарнирные узлы, за неизвестные принимают лишь углы поворота жестких узлов. Первый член правой части формулы (10.5) дает момент со стороны защемления от поворота на угол <р( (рис. 178, б) и от поворота всего стержня на угол Qik (рис. 178, б). Эти реактивные моменты от защемления, вызванные его упругостью и взаимным смещением опор, называют упругими реакциями. Их значения используются и в канонической форме метода.
– Конец работы –
Эта тема принадлежит разделу:
СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫЕ СИСТЕМЫ
На сайте allrefs.net читайте: Составим следующее равенство работ для двух состояний системы — действительного (рис. 5.34, а) и единичного (рис. 5.34, б):...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Кинематическая неопределимость рам
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.03 сек.
Новости и инфо для студентов