рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Физика
- /
- СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫЕ СИСТЕМЫ
Реферат Курсовая Конспект
СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫЕ СИСТЕМЫ
СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫЕ СИСТЕМЫ - раздел Физика, Рассмотрим Теперь Общий Случай, Когда Одновременно Происходят Перемещения В ...
Рассмотрим теперь общий случай, когда одновременно происходят перемещения в направлениях нескольких опорных закреплений статически определимого сооружения. В качестве конкретного примера рассмотрим систему, изображенную на рис. 5.34, а. Штриховой линией показано новое положение системы, вызванное смещением правой опоры по вертикали и горизонтали соответственно на а и Ь.

Определим угол поворота узла Е заданной системы. Для этого, решая задачу с помощью теоремы о взаимности работ, создадим единичное состояние системы (рис. 5.34, б), приложив к ней в направлении искомого углового перемещения единичный момент Xt. Под влиянием этого момента на правой опоре возникнут реакции Rx и JR2, соответственно равные III и 1/(2/г).
Составим следующее равенство работ для двух состояний системы — действительного (рис. 5.34, а) и единичного (рис. 5.34, б):

Глава 6
РАСЧЕТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ МЕТОДОМ СИЛ
Статически неопределимой системой называется система, определение усилий в которой невозможно с помощью одних лишь уравнений статики. Например,…ЧАСТЬ ВТОРАЯ
СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫЕ СИСТЕМЫ
■)
]
' 1
Глава 9 .1
РАСЧЕТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ РАМ МЕТОДОМ СИЛ j
Простейшие критерии. Статически неопределимой ,§ называют такую систему, которая не может быть рассчитана с ис-jj пользованием одних условий… внешние связи, т. е. лишние опорные закрепления. Примером внешне статически неопределимой системы является трезшролетная рама(рис. 140). Степень…I
Для этого достаточно ввести в рассмотрение опорный диск, котрц рый полагаем прикрепленным к земле. Рассмотрим, например^ раму, обе стойки которой защемлены (рис. 144, а). Система внешне трижды статически неопределима. Объединяя защемления А и $

|
и вводя опорный диск А0
в качестве элемента сшоЩ
конструкции (рис. 144,6)5
получим внутренне стати}
чески неопределимую сие*
тему с тремя лишним?)
связями. j
Степень статической
неопределимости для сие-?
тем с соединениями раз
личных видов.Установим*
простой критерий для оп-<
ределения степени стати
ческой неопределимости
стержневой системы, имею-]
щей любые замкнутые кон- J
туры с шарнирными вклю-;|
чениями. :
В соооужениях игтпр- :
В сооружениях ветре-!| чаются узловые соединения трех видов (рис. 145): 1) жесткая ' связь стержней в узле (а); 2) соединение полным шарниром (б), i когда все стержни, сходящиеся в узле, связаны шарнирно; 3) i соединение неполным шарниром (в), когда одна часть стержней / в узле прикреплена шарнирно, а другая их часть — жестко.
При наличии шарнирного прикрепления конца стержня к узлу получаем добавочное условие равенства нулю изгибающего момента в центре шарнира. При этом нужно иметь в виду, что для любого узла можно составить общее условие равновесия:

где М(—внутренний момент в сечении у узла для данного стержня. Это условие должно соблюдаться для узлов различного вида. Для полного шарнира получаем столько добавочных уравнений равновесия, сколько стержней сходится в узле без одного. Принимая во внимание уравнение (9.1), для узла по рис. 145,6 гоставляем четыре следующих дополнительных условия равновесия:

Условие же равенства нулю момента те вытекас! «о lt,"—..
(9.1).
Для неполного шарнира (сравнивая это соединение с

|
| Общий прием установления степени статической неопределимости любой стержневой системы со смешанными прикреплениями за- |
жестким) имеем столько условий равновесия, сколько всего стержней в узле прикреплено шарнирно. Так, для узла по рис. 145,в
ТИ ЛЮООИ СТержнсвип и,ч^,ш — ___

|
ключается в следующем. От данной системы (рис. 146), имеющей как жесткие, так и шарнирные соединения в узлах (объединяя опорные части в общий опорный диск), переходим к системе, содержащей лишь замкнутые бесшарнирные контуры, и определяем по числу п замкнутых ее контуров степень статической неопределимости преобразованной системы дп: Наличие же в заданной системе шарнирных соединений позволяет составить добавочные условия равновесия вида М,- = 0.
вида m,- = u.
Подсчитываем общее число g добавочных условий равновесия, определяемых наличием шарниров. При этом принимаем во внимание указанные выше правила подсчета числа добавочных условий равновесия для полных и неполных шарниров. Для рамы, изображенной на рис. 146, имеем два полных и четыре неполных шарнира, над каждым из которых на рисунке указано добавочное число условий равновесия. Общее число добавочных условий равновесия g=10.
При п замкнутых контурах и g дополнительных степенях свободы, которые дают шарниры, степень статической неопределимости устанавливают по формуле
CH = 3n-g.
Это наиболее простой критерий установления степени статической неопределимости плоской системы, состоящей из замкнутых контуров. Для рамы по рис. 146 получаем
CH = 3n-g = 3-5-10 = 5.
Система пять раз статически неопределима.
Для более сложных систем при совмещении контуров целесо-|^И
образно применять общий метод, заключающийся в последовательней
ном удалении всех лишних связей. Это удаление связей можно^В
производить: а) отбрасыванием лишних опорных стержней; б) про^Н
ведением разрезов, причем каждый разрез стержня, жестко прикре^^И
пленного к узлам, равносилен отбрасыванию трех связей; в) вклю^^Н
чением шарниров и т. д. ^Н
Основные свойства статически неопределимых систем. '^Ш
Методы расчета '^Ш
1. Статически неопределимое сооружение ввиду наличия доба-|^В вочных лишних связей оказывается по сравнению с соответствуют;|И щей-статически… 2. В статически неопределимой системе ввиду ее большей связ-ЯН ности… 3. Нарушение лишних связей статически неопределимых систем Я (или их перенапряжение) не ведет к немедленному…Основная система при расчете рам методом сил. Канонические уравнения
Заменяем отброшенные лишние связи соответствующими им силами, называемыми лишними неизвестными Xlf X2, Х3 и т. д. Составляем уравнения совместности перемещений, выражающие условия равенства… Аой лишней связи.РАСЧЕТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ МЕТОДАМИ ПЕРЕМЕЩЕНИЙ И СМЕШАННЫМ
Как уже мы выяснили (см. гл. 6), при расчете статически неопределимой системы методом сил за лишние неизвестные принимаются усилия в лишних связях… I нию. Иными словами, сближение концов такого стержня при его ' изгибе не учитывают.LJL VlIlilV'lA^AJl Jk * ■■ I ■■ -■■■■ ■■ ■ ^» ■ ■ ■ ж ш ■ ■ ^j ж д^ | Ц 4

|
ном случае равно единице, т.е. пд=1.
Общее число неизвестных перемещений
п=«у+ял=2+1=3.
Рассмотрим теперь раму, изображенную на рис. 7.4, а. " Число ее «жестких» узлов равно
шести, следовательно, пу=6. Шарнирная схема рамы трижды геометрически изменяема, так как для превращения ее в геометрически неизменяемую необходимо ввести три стержня, например, так, как это сделано на рис. 7.4, б. После включения этих
стержней узел 7 будет прикреплен к «земле» с помощью двух стержней, оси которых не лежат на одной прямой; следовательно, узел 7 будет геометрически неизменяемо связан с «землей». Аналогично прикреплены узлы 5 и 6. Затем с помощью стержней 4—6 и 5—4 прикреплен узел 4 и аналогично узлы 2 и 3.
Итак, число линейных неизвестных перемещений равно трем, т. е. пл=3. Общее число неизвестных в рассматриваемой системе
равно

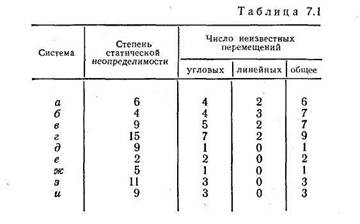
В заключение приводим табл. 7.1, в которой указаны степень статической неопределимости и общее число неизвестных при расчете методом перемещений для систем, изображенных на рис. 7.2.
§ 7.3. ОСНОВНАЯ СИСТЕМА
При расчете методом перемещений система расчленяется на ряд однопролетных статически неопределимых балок. Это достигается введением в нее дополнительных связей.
Получаемая в результате этого система называется основной системой метода перемещений.
Приведем сравнение основных систем метода перемещений и
метода сил. • •
Рассмотрим, например, прямоугольную раму, изображенную на рис. 7.5, а. Эта рама дважды статически неопределима. Проведя разрез по шарниру и удалив этим две связи, получим основную систему метода сил в виде двух балок (одной прямой и одной ломаной), заделанных одним концом (рис. 7.5, б). Эта система статически определима. Введя же в систему две дополнительные связи: одну, препятствующую повороту жесткого узла /, а другую, препятствующую линейным смещениям узлов 1 и 2, получим основную систему метода перемещений (рис. 7.6). Эта система четыре раза статически неопределима.
Таким образом:

|
1) основная система метода сил получается удалением связей,
а основная система метода перемещений — введением связей;
2) переход от заданной системы к основной системе метода сил
связан со снижением степени ее статической неопределимости, а пе
реход к основной системе метода перемещений — с повышением
степени статической неопределимости.
Здесь следует отметить, что введенные в основную систему метода перемещений защемляющие связи отличаются от обычного абсолютно жесткого защемления (заделки) тем, что оказывают препятствие лишь повороту узла и не лишают его линейной подвижности. Реакции таких связей представляют собой моменты, приложенные в узлах системы.
Что касается связей, уничтожающих линейные смещения, то введение таких связей можно осуществить различными путями.
Основную систему метода перемещений, представляющую собой заданную систему с наложенными на нее связями, препятствующими повороту и смещению узлов, можно назвать кинематически определимой; общее же число неизвестных метода перемещений следует в таком случае называть степенью кинематической неопределимости заданной системы.
В статическом отношении основная система метода перемещений отличается от заданной тем, что в ней возможно появление реактивных моментов во введенных заделках и реактивных усилий в добавленных стержнях.
Для получения основной системы метода перемещений, во-первых, во все «жесткие» узлы заданной системы следует ввести заделки (защемления), препятствующие повороту узлов, и, во-вторых, ввести в заданную систему стержни, препятствующие линейным смещениям узлов.


|
Например, можно поставить раскос 0—2 (рис. 7.7, а) или раскос /—3 (рис. 7.7, б), или горизонтальный опорный стержень в узле 2 (рис. 7.7, в), или наклонный опорный стержень в узле 1 (рис. 7.7, г).
Связь в виде раскоса /—3 (рис. 7.7, б) не препятствует перемещению узла 3, который и без того неподвижен. Она исключает лишь перемещения узла 1 в направлении прямой, соединяющей этот узел с узлом 3. В этом отношении от нее ничем не отличается связь в виде опорного стержня, показанная на рис. 7.7, г.
При введении в сооружение дополнительных связей, исключающих линейные смещения узлов, предпочтение следует отдавать связям, соединяющим узлы с «землей», а не друг с другом, т. е. опорным стержням, а не дополнительным элементам сооружения. При наличии в раме горизонтальных и вертикальных стержней рекомендуется вводить горизонтальные и вертикальные (а не наклонные) опорные стержни; это упрощ&етпасчет сооружения.
В качестве второго примера выбора основной системы метода перемещений рассмотрим раму, изображенную на рис. 7.8, а. Степень статической неопределимости этой системы равна шести. Число неизвестных при расчете ее методом перемещений также равно шести: четыре угловых и два линейных перемещения. Введя четыре заделки и два стержня, получим основную систему, изображенную на рис. 7.8, б.
Перейдем к детальному изучению элементов, из которых состоит основная система метода перемещений, т. е. к изучению однопролет-ной статически неопределимой балки.
Рассмотрим сначала построение методом сил эпюр изгибающих моментов в балке постоянной жесткости с одним защемленным, а другим шарнирно опертым концом (рис. 7.9, а) для нескольких характерных случаев внешнего воздействия; при этом условимся считать положительными реакции в виде сил, направленные вверх, и реактивные моменты, действующие по часовой стрелке. В качестве основной системы метода сил возьмем консольную (рис. 7.9, 6") балку (с одним защемленным и другим свободным концом). Лишним неизвестным будет реакция подвижной опоры Xr=RB.
При любом внешнем воздействии т значение Xi можно найти из уравнения

Глава 10 РАСЧЕТ РАМ МЕТОДОМ ПЕРЕМЕЩЕНИЙ
Кинематическая неопределимость рам
Если при расчете статически неопределимых систем по методу сил выбирают силы (усилия в лишних связях) и для их отыскания используют уравнения… Метод перемещений в настоящее время получил большое распространение, особенно… Существуют две формы решений задач по методу перемещений: каноническая и развернутая. Развернутая форма применена…Расчет рам по развернутой форме метода перемещений
вестных угла поворота узлов *: <Р*. Ф*> Ф*. Фа и два угла по-[.:■. ворота стержней Qrt и Qtk — 1р по степеням свободы шарнир-| ной схемы… * ти). Деформированный вид | рамы получен представлени- f ем картины перекоса… узлов ремы (равенство углов поворота касательных к изог-' нутым линиям всех стержней, , сходящихся в данном узле).…Уравнения метода перемещений в развернутой форме
Если рама имеет все жесткие прикрепления концов стержней в узлах, для концевого момента Mik применяем выражение (10.3): — абсолютное значение суммы реактивных моментов, вызванных упругими поворотами, равно сумме реактивных моментовот…– Конец работы –
Используемые теги: статически, неопределимые, системы0.035
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫЕ СИСТЕМЫ
Что будем делать с полученным материалом:
Если этот материал оказался полезным для Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.086 сек.
Новости и инфо для студентов