рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Менеджмент
- /
- Понятие о скользящем режиме. Способ его получения.
Реферат Курсовая Конспект
Понятие о скользящем режиме. Способ его получения.
Понятие о скользящем режиме. Способ его получения. - раздел Менеджмент, ОСОБЕННОСТИ НЕЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ Внесем Изменения В Схему, Представленную На Рис.15. Введем Корректирующую Гиб...
Внесем изменения в схему, представленную на рис.15. Введем корректирующую гибкую обратную связь через дифференцирующее звено с передаточной функцией  .
.

Рис. 19. Структурная схема исследуемой системы
Дифференциальное уравнение фазовых траекторий получается следующим:
 (13)
(13)
В связи с введением на входе дополнительного сигнала по производной в этом уравнении в отличии от уравнения (7) функция  определяется не только x, но и ее производной y.
определяется не только x, но и ее производной y.
На рис.20, 21 и 22 показаны фазовые траектории данной системы для трех видов релейных характеристик. Для идеального реле (рис.20) уравнение линии переключения:
 (14)
(14)
Для реле с гистерезисом (рис.21) переключение происходит, когда  .
.
Уравнения линий переключения описываются следующими уравнениями
 (15)
(15)
Введение дополнительного воздействия по скорости привело к наклону линий переключения. Направление наклона определяется знаком сигнала обратной связи по скорости.
Уравнение движения, описывается следующей зависимостью:
 . (16)
. (16)
На рис.20 показана касательная «1» к фазовой траектории в точке ее отхода от линии переключения. Чем ближе эта точка к началу координат, тем круче идет касательная. Когда ее наклон станет равным наклону линии переключения, изображающая точка пойдет по линии переключения, то есть будет “скользить” по этой линии к началу координат.

Рис.20. Скользящий режим в системе с идеальным реле.
Режим, соответствующий участку ab, называется скользящим режимом. Его главным преимуществом является то, что переходный процесс в релейной системе протекает, как в системе непрерывного действия.
При значениях x и y, соответствующих линии переключения, реле должно переключаться. Поэтому физически скользящий режим заключается в бесконечно быстрых переключениях реле, вызывающих соответственно колебания x с бесконечно малой амплитудой относительно постепенно спадающего к нулю среднего значения x. В реальных системах частота и амплитуда колебаний конечны, а изображающая точка движется к началу координат, колеблясь относительно линии переключения. Поэтому в действительности хвост переходной характеристики представляет собой высокочастотные колебания, а изображенная на рисунке кривая является постоянной составляющей величины x.
На рис.21 показаны фазовые портреты рассматриваемой системы с двухпозиционным реле. Скользящий режим начинается в точке линии переключения, в которой наклон касательной (прямая 1 на рис.21) к фазовой траектории (линия 2 на рис.21) становится больше наклона линии переключения.
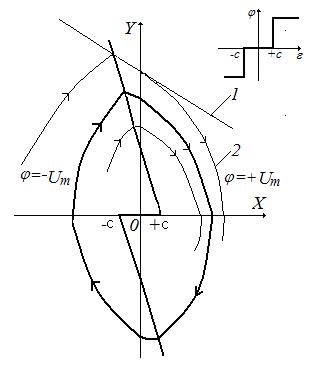
Рис.21. Скользящий режим в системе, имеющей реле с зоной нечувствительности
Фазовая траектория не пересекает линию переключения, а “отражается” от нее обратно, совершая колебания между двумя линиями переключения, соответствующими ширине петли статической характеристики реле. С ростом коэффициента обратной связи  амплитуда устойчивых автоколебаний в системе уменьшается вплоть до величины, равной ширине гистерезиса.
амплитуда устойчивых автоколебаний в системе уменьшается вплоть до величины, равной ширине гистерезиса.
В случае, изображенном на рис.22, линии переключения тоже наклоняются против часовой стрелки, а скользящий режим происходит путем движения изображающей точки по одной линии переключения до особой линии застоя на оси абцисс. Это соответствует быстрым отключениям и включениям реле все время в одну и ту же сторону.
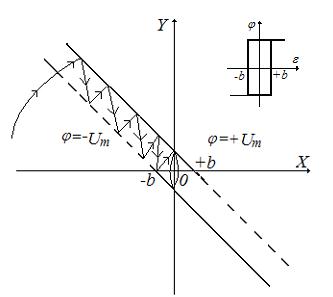
Рис.22. Скользящий режим в системе, имеющей реле с гистерезисом
– Конец работы –
Эта тема принадлежит разделу:
ОСОБЕННОСТИ НЕЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Методика исследования нелинейных систем второго порядка методом фазовой плоскости Примеры исследования... Методика исследования нелинейных систем методом фазовой плоскости включает в себя следующие этапы...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Понятие о скользящем режиме. Способ его получения.
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.014 сек.
Новости и инфо для студентов