рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Менеджмент
- /
- ОСОБЕННОСТИ НЕЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Реферат Курсовая Конспект
ОСОБЕННОСТИ НЕЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
ОСОБЕННОСТИ НЕЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ - раздел Менеджмент, ОСОБЕННОСТИ НЕЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ Нелинейной Считается Система, Содержащая Хотя Бы Одно Нелинейное Звено...
Нелинейной считается система, содержащая хотя бы одно нелинейное звено, то есть звено, описываемое нелинейным уравнением. Все реальные САУ в той или иной степени нелинейны, но часто существует возможность свести задачу к исследованию линейной модели реальной системы путем линеаризации последней. Процесс линеаризации невозможен в том случае, когда в системе присутствуют звенья с существенно нелинейными характеристиками.
Все реальные объекты и системы нелинейны.
Линейной называется такая САУ, которая описывается линейными дифференциальными уравнениями.

Е1 R2 E2
R1
I= ; I=
; I= *U;
*U;  +
+ - принцип суперпозиции в случае линейности.
- принцип суперпозиции в случае линейности.
Нелинейные объекты и системы – это те, у которых хотя бы один элемент нелинеен.
 P=
P= =
= Kоб=(
Kоб=( ) при I=I10
) при I=I10
Пример линеаризуемой (слабой) нелинейности.
Такая нелинейность присуща всем реальным объектам.
При К=Кmin определяют точность, при К=Kmax определяют устойчивость.
Но существуют такие нелинейности, которые нельзя линеаризовать (существенные).
Примеры:
1. Релейные элементы
u=sign εumax ,т.е.
|
 0
0
u=-umax , при ε  0
0
|
 с симметр. хар-кой
с симметр. хар-кой 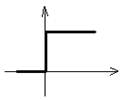 с несимметр. хар-кой
с несимметр. хар-кой
2. Люфт:

3. Гистерезис (неоднозначные нелинейные звенья):
 u=umax при ε≥b, если ε≥0
u=umax при ε≥b, если ε≥0
 u=-umax при ε
u=-umax при ε b, если ε0
b, если ε0
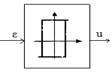
4. Релейный элемент с зоной нечувствительности:
u=umax при ε≥b
u=0 при -b ε b
b
u=-umax при ε-b
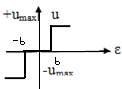
Статические характеристики и математическое описание релейных элементов

Рис. 1. Статические характеристики релейных элементов
а – идеальное реле;
б –реле с зоной нечувствительности;
в –реле с гистерезисом.
Выходной управляющий сигнал принимает следующие значения:
 –для идеального реле
–для идеального реле
| |
 –для реле с зоной нечувствительности
–для реле с зоной нечувствительности
 –для реле с гистерезисом
–для реле с гистерезисом
Нелинейные системы подразделяются на два класса. К нелинейным системам первого класса относят такие, которые с помощью структурных преобразований можно привести к виду (рис.2):
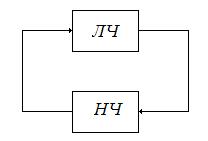
Рис.2. Нелинейные системы I класса
Системы, где подобное преобразование невозможно относят ко второму классу (рис.3). Они требуют использования более сложных с математической точки зрения методов исследования.

Рис.3. Нелинейные системы II класса
– Конец работы –
Эта тема принадлежит разделу:
ОСОБЕННОСТИ НЕЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Методика исследования нелинейных систем второго порядка методом фазовой плоскости Примеры исследования... Методика исследования нелинейных систем методом фазовой плоскости включает в себя следующие этапы...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: ОСОБЕННОСТИ НЕЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.018 сек.
Новости и инфо для студентов