Устойчивость движения систем - раздел Философия, МЕТОДОЛОГИЧЕСКИЕ ОСНОВЫ МОДЕЛИРОВАНИЯ СЛОЖНЫХ СИСТЕМ Система Управления Постоянно Подвергается Возмущениям, Отклоняющим Ее От Зада...
Система управления постоянно подвергается возмущениям, отклоняющим ее от заданного закона движения. Действие возмущения сопровождается восстанавливающим действием регулятора. В системе возникает переходный процесс. Может оказаться, что система не сможет восстановить требуемый закон движения. Она будет удаляться от него, либо совершать вокруг него незатухающие колебания.
Чтобы определить, устойчиво ли состояние равновесия какой-либо системы, изучается поведение этой системы при малых отклонениях от равновесия.
Под возмущающими факторами понимаются силы, не учитываемые при описании движения вследствие их малости по сравнению с основными силами. Эти возмущающие силы обычно неизвестны: составленные уравнения движения отличаются от истинного движения, в них не учтены некоторые поправочные коэффициенты. Возмущающие силы могут действовать мгновенно, что сведется к малому изменению начального состояния системы (под начальным состоянием системы при выборе оптимального управления понимается начало воздействия возмущений), либо непрерывно. При малых возмущающих воздействиях движение будет устойчивым, при значительных - неустойчивым.
Система обычно находится в состоянии движения, поэтому рассматривают устойчивость движения. Проблема исследования устойчивости движения системы – основная задача теории устойчивости (одна из основных составляющих теории дифференциальных уравнений).
Пусть заданный режим работы системы характеризуется координатами: х10 (t), х20 (t), х30 (t), . . . . Пусть на систему действует возмущение, которое заставляет двигаться ее по другим траекториям: х1 (t), х2 (t), х3 (t), . . . Система будет находиться в возмущенном состоянии. Если система устойчива, то она снова войдет в заданный режим или в область около этого режима εi = хi (t) - хi0 (t).
Заданное невозмущенное состояние движения устойчиво, если в результате возмущений возмущенное состояние движения с течением времени перейдет в некоторую конечную область, находящуюся в окрестности невозмущенного состояния, определяемого координатами:
ε1 = х1 (t) – х10 (t);
ε2 = х2 (t) – х20 (t);
. . . . . . . . . .
εn = хn (t) – хn0 (t).
Признаки устойчивости и неустойчивости движения определяются различными методами теории устойчивости.
Предположим, что система автоматического управления описывается системой дифференциальных уравнений
уi - переменные параметры, описывающие состояние системы;
Уi – известные функции, определенные в некоторой фиксированной области пространства переменных t, y1, y2, . . ., yn, с начальными условиями уi(t0) = уi0 , (i = 1, 2, . . . , n). Они определяют исходное состояние системы управления при t = t0. Каждой системе начальных значений уi (t0), (i = 1, 2, . . . , n) соответствует решение уi (t0) , (t = 1, 2, . . . , n) уравнений (1).
Если окажется, что сколь угодно малые изменения начальных состояний способны сильно изменить решение, то решение, определяемое выбранными начальными данными, не имеет практического значения, так как соответствует неустойчивому состоянию системы.
Возникает вопрос о нахождении условий, при которых достаточно малое изменение начальных данных вызывает сколь угодно малое изменение решения, т.е. нахождения условий, при которых система управления, описываемая уравнениями (1) устойчива.
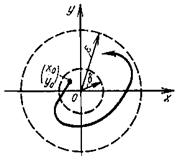
Решение системы (1) называется устойчивым по Ляпунову, если при любой заданной области ε допустимых отклонений от состояния равновесия, можно подобрать область допустимых начальных условий δ = δ (ε), обладающую тем свойством, что ни одно движение, начинающееся внутри δ, никогда не достигнет границ области ε (рисунок 3.5 – двумерный случай).
Таким образом, решение уi*(t) , (i = 1, 2, . . . , n) системы (1) устойчиво, если для любого t0 из интервала [0, T] и числа ε > 0 можно подобрать δ > 0, δ ≡ δ (t0, ε) > 0, такое, что всякое решение xi(t), (i = 1, 2, .. . , n) той же системы, начальные значения которого удовлетворяют неравенствам
|уi*(t0) - уi (t0)| < δ (i = 1, 2, . . . , n),
определено в промежутке t0< t < ∞ и для всех tt0справедливы неравенства
|уi*(t) - уi (t)| < ε (i = 1, 2, . . . , n). (2)
Близкие по начальным значениям решения остаются близкими для всех tt0.
Решение уi*(t), (i = 1, 2, . . . , n) системы (1) называется неустойчивым, если существует область ε допустимых отклонений от состояния равновесия, для которой не существует области δ, окружающей состояние равновесия и обладающей тем свойством, что ни одно движение, начинающееся внутри δ, никогда не достигнет границы области ε, либо если это решение непродолжаемо при t → ∞.
В этом случае при t0[0, T] и сколь угодно малых ε > 0 и δ > 0 хотя бы для одного решения уi (t) , (i = 1, 2, . . . , n) неравенство (2) не выполняется при tt0.
Если устойчивое решение уi*(t), (i = 1, 2, . . . , n) при t → ∞ удовлетворяет условию
lim |уi*(t) - уi (t)| = 0(t → ∞)
для всякого решения уi (t), то в этом случае мы имеем дело с асимптотической устойчивостью (рисунок 3.6 – двумерный случай).
Устойчивость по Ляпунову – это устойчивость для достаточно малых начальных отклонений. Это существенно для исследования физической осуществимости состояния равновесия. Если данное состояние устойчиво по Ляпунову, то оно физически осуществимо, если нет – то неосуществимо, так как при любых сколь угодно малых начальных отклонениях изображающая точка системы начнет уходить из окрестности точки равновесия (пример: состояние маятника в верхнем положении - достаточно малого толчка, чтобы он уходил от нее все больше и больше).
Пример. Автопилот – прибор, который может многократно изменять положение рулей и тем самым изменять характер полета самолета. Пилоту задается цель (место и время прибытия), для достижения которой рассчитывается курс, пилот выводит самолет на расчетный курс и включает автопилот. Движение самолета будет описываться некоторой системой дифференциальных уравнений
z' = f (z, t, p, ξ ). (1)
Здесь z - вектор, описывающий фазовое состояние системы, т.е. координаты и скорость самолета, ξ – случайный вектор, характеризующий внешние воздействия, р – вектор конструктивных параметров автопилота, которые могут выбираться субъектом (конструктором), чтобы автопилот обеспечивал достижение цели управления.
Зная расчетную траекторию самолета, мы всегда можем выбирать начало отсчета таким образом, чтобы этой траектории при отсутствии внешних возмущений отвечали нулевые значения фазовых переменных. Значит, точка z = 0должна удовлетворять уравнению
f (0, t, p, 0) = 0.
Предположим далее, что в некоторый момент t = t0 на движение самолета подействовало некоторое случайное возмущение (например, порыв ветра), в результате которого состояние системы изменилось:
z (t0) = z0 ≠ 0.
Каким условиям должно удовлетворять движение самолета, чтобы, несмотря на возмущение, он достиг заданной цели? Так как траектория самолета должна пройти через цель управления, то необходимо, чтобы возникшее отклонение параметров полета самолета от расчетных значений со временем могло исчезнуть. Для этого достаточно, чтобы движение самолета обладало асимптотической устойчивостью. Последнее означает, что должно выполняться условие
lim z(t) → 0 (t→∞) (2)
Это условие описывает асимптотические свойства движения при t→∞. Достижение цели должно произойти за конечное время Т. Здесь произошла замена большого, но конечного отрезка времени бесконечным. Возможность такой замены конечного отрезка времени бесконечным означает, что характерное время полета самолета является "практически" бесконечно большим: оно гораздо больше времени, необходимого для компенсации возмущения (характерного времени затухания колебаний самолета).
Исследование устойчивости тривиального решения (z =0) решается методами теории устойчивости.
Но задача проектирования автопилота, обеспечивающего асимптотическую устойчивость движения самолета, не сводится только к задаче теории устойчивости. Необходимо определить допустимые интервалы изменения параметров автопилота (компоненты вектора р), обеспечивающие устойчивость, т.е. решать обратную задачу. Поскольку отклонения от расчетной траектории – величины малые, то естественно использовать для решения рассматриваемой задачи идеи линеаризации.
Таким образом, изучая способы управления некоторым процессом, мы должны решать сразу две задачи: выбор принципиальной схемы регулятора (автопилота или какого либо другого механизма) и затем выбор его параметров, обеспечивающих достижение целей управления. Условия устойчивости определяют в пространстве параметров некоторое множество G1. Выбор рG1 гарантирует выполнение условия устойчивости (2).
Конструктивная схема накладывает на выбор параметров р вполне определенные ограничения р ∈G2. Значит для достижения цели управления, т.е. выполнения условий (2) (асимптотические свойства движения при ), необходимо, чтобы
р ∈G2= G1 ∩ G2.
В распоряжении имеется множество параметров в области G, обеспечивающих достижение цели управления. Поэтому имеется возможность уточнения вектора р – возможность подчинить его каким-либо дополнительным условиям но уже не на множестве G2, а на множестве G. Например, это может быть требование минимизации перегрузок (комфорт). Если достижение цели возможно многими способами, то появляется возможность обеспечить это условие. Тогда задачу оценки качества регулирования можно сформулировать следующим образом: на множестве параметров р, удовлетворяющих условию рG, найти такие значения р, которые обеспечивают выполнение условия
I(p) → min,
где I(p) – некоторый функционал, зависящий от траектории и характеризующий дополнительное ограничение (допустимую перегрузку).
В такой постановке рассматриваются процессы, развивающиеся на большом интервале времени, и применяются методы теории устойчивости, оперирующей с асимптотическими свойствами решений (при t → ∞): время полета самолета на много порядков больше времени компенсации его отдельных колебательных движений.
Здесь рассматривается переходный процесс – процесс возвращения системы к исходному стационарному режиму после окончания действия случайного возмущающего фактора – изучается качество управления. В подобной постановке решались проблемы регулирования стационарных движений: поддержание постоянных оборотов машины, обеспечение равномерного прямолинейного полета самолета на заданной высоте и т.д.
Системность... Системные идеи лежат в основе деятельности человечества с начала его... Необходимость решения специфических проблем связанных с возникновением и развитием больших и сложных систем вызвала...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ:
Устойчивость движения систем
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
Определение понятия системы
Определение понятия "модель системы" предполагает, прежде всего, определение понятия "система".
Определение понятия системы – это тоже модель (лингвистическая
Внешняя среда
Внешняя среда -набор существующих в пространстве и во времени факторов, которые оказывают действие на систему и которые испытывают влияние со стороны системы.
Объекты,
Функции системы
Функции системы –действия компонентов системы (преобразования входов в выходы), необходимые для выполнения системой своих задач, обусловленных целью системы (интегративным свой
Системный подход
В основе системного подхода лежит стремление изучить объект (систему, явление, процесс) как нечто целостное и организованное, во всей полноте и многообразии связей – ориентирует на рассмотре
Развитие искусственной системы и ее жизненный цикл
В системе как элементе системы более высокого уровня могут накапливаться противоречия (проблемы), для разрешения которых система должна иметь новые функциональные свойства –
Целевой характер моделирования
Система может иметь практически необозримое количество сущностей (свойств), создание модели всей системы нереально – не существует модели «вообще».
Таким образом, моделирование имеет це
Процесс моделирования
Как разделить модель на подмодели, как построить иерархию моделей для исследования элементов (декомпозиция) и как их потом объединить для исследования системы в целом, чтобы объяснить целое через ч
Цели математического моделирования
Создание модели всей системы нереально – не существует модели «вообще».
Из этого следует множественность моделей одного объекта: для каждой цели требуется своя модель одно
Анализ чувствительности модели
При построении модели параметров и предположения могут быть приняты с некоторой степенью неопределенности, кроме того, параметры могут изменяться в зависимости от внешних условий и во времени. Чувс
Описание внешних воздействий
Внешние воздействия - совокупность факторов, воздействующих на систему и оказывающих влияние на эффективность ее функционирования.
Модель внешних воздействий должна обладать следующими осн
Декомпозиция системы
Система представляется набором моделей, отображающих ее поведение на различных уровнях декомпозиции (стратах). Каждый уровень учитывает присущие ему свойства, переменные и зависимости.
Дек
Подготовка исходных данных для математической модели
Исходные данные для разработки математической модели содержат выявленные законы функционирования системы в виде операторов, параметры и переменные модели, условные обозначения, классификацию исходн
Модель состава и структуры системы
Модель состава
Модель состава – список элементов системы. Сложность построения модели состава состоит в ее неоднозначности. Это же относится и к границам
Виды структур
В основе исследования структуры лежит ее классификация. Принципы построения и вид модели структуры системы зависят от типа системы и целей исследований.
При моделировании систем вообще и,
Установление функциональных зависимостей
После перехода от описания моделируемой системы к ее модели, построенной по блочному принципу, необходимо построить математические модели процессов, происходящих в различных блоках.
Исходн
Функционально стоимостной анализ.
Под функционально стоимостным анализом понимают метод системного анализа функций объекта (технологического процесса, производства, системы управления), направленный на поиск технико-экономических р
Пути уменьшения неопределенностей
Неопределенность уменьшается при разработке и анализе альтернативных вариантов, дополнительном анализе неопределенных факторов (сбор и обработка недостающих исходных данных, выявление среди множест
Формализация системы в виде автомата
Технические устройства дискретного действия для переработки информации лежат в основе вычислительных машин, автоматических устройств для управления объектами в системах регулирования и управления и
Формализация системы в виде агрегата
При выборе той или иной схемы формализации системы всегда возникает противоречивая задача – получить как можно более простую модель и обеспечить требуемую точность. При таком подходе различные сист
Моделирование процесса функционирования агрегата
Процесс функционирования агрегата состоит из скачков состояния в моменты поступления входных сигналов и выдачи выходных сигналов и изменений состояния между этими моментами.
Цель моделиров
Моделирование агрегативных систем
Агрегативные системы (А-системы) - класс сложных систем, обладающий следующим свойством: существует такое (в общем случае неоднозначное) расчленение системы на элементы, при котором к
Модель сопряжения элементов
Математическая модель сложной системы помимо формального описания элементов обязательно включает формальные описания взаимодействия элементов – модель сопряжения.
В модели сопряжения эл
Законы Ньютона.
Рассмотрим систему, модель которой может быть представлена как материальная точка, система материальных точек (механическая система).
Материальная точка - тело, размеры и форма которого не
Закон сохранения импульса.
Количество движения (импульс) материальной точки Кi = mivi .Это векторная величина, его направление совпадает с направлением скорости. Количество движения (импульс) системы:
К =
Работа, энергия, мощность
Силы служат причиной либо ускорения тела (динамическое действие), либо изменения его формы (статическое действие).
Если сила перемещает тело на некоторое расстояние, то она совершает над т
Работа против силы тяжести.
Если тело движется в направлении действия силы тяжести, то над телом совершается работа A = G h или Aт = mg h.
Чтобы поднять тело (увеличить расстояние от ц
Работа, затрачиваемая на ускорение.
Если под действием постоянной силы Fуск тело равномерно ускоренно перемещается на расстояние s, то над ним совершается работа Aуск = Fуск s
Работа против сил трения.
Движущееся тело теряет энергию из-за наличия трения, которое действует на поверхности соприкосновения тел и и затрудняет их перемещение относительно друг друга.
Динамика поступательного движения.
Основной закон поступательного движения: производная по времени от количества движения К материальной точки или системы точек относительно неподвижной (инерциальной) системы
Тело, брошено под углом к горизонту.
Как и в случае горизонтально брошенного тела, тело движется, в результате комбинации двух движений: равномерного прямолинейного движения под углом к горизонту и свободного падения в вертикальном на
Движение тела переменной массы.
Дифференциальное уравнение поступательного движения твердого тела, масса которого зависит от времени, имеет вид
Модель колебательного процесса
Колебаниями или колебательным движением называется движение (изменение состояния), обладающее повторяемостью во времени - процесс изменения параметров системы с многократным чередованием их
Модель консервативной системы.
Рассеяние (диссипация) энергии происходит в связи с наличием того или иного вида трения (механическая энергия с течением времени уменьшается за счет преобразования в другие виды энергии, например,
Электрическая подсистема.
Электрическая модель является наиболее и универсальной для описания явлений и процессов различной природы.
Типовыми простейшими элементами электрической подсистемы являются резистор с элек
Модели элементов гидравлических систем
Технические системы, в которых происходит перемещение несжимаемой жидкости, принято называть гидравлическими. Зарубин стр. 110
Участок трубопровода.
По
Модели элементов пневматических систем
Под пневматическими понимают технические системы, в которых рабочей средой является воздух или газ. Рабочая среда, в отличие от газа является сжимаемой: ее плотность r существенно зависит от
Выбор средств доставки грузов.
Имеется m грузообразующих пунктов с объемами грузов аi . Имеется n средств доставки грузов (вид
Экономическая интерпретация задач линейного программирования.
Предприятие располагает определенными, ограниченными производственными мощностями - активными средствами (станки, сырье, рабочая сила, энергия и т.д.). Для изготовления различных видов изделий испо
Перевозки взаимозаменяемых продуктов
Известны объемы и потребности продукции каждого вида. Если продукты, подлежащие перевозке, качественно совершенно различны (уголь, цемент, сахар), так что ни один из них не может быть использован в
Перевозка неоднородного продукта на разнородном транспорте.
Для обеспечения перевозок может быть использовано s автохозяйств, в каждом из которых r типов автомашин. Машины разных типов, обладая различными эксплуатационными характеристиками и р
Основные определения
Строгий подход к термину «управление» требует четкого ответа на вопрос, как и за счет чего может быть выполнена цель управления.
Основная особенность управления - целенаправленность
Формальная запись системы с управлением
Основная особенность управляемых систем – в системе существуют свободные функции, которыми может распорядиться субъект (устройство, исследователь, лицо, принимающее решение) в своих интересах.
Модели систем автоматического управления
Система автоматического управления стремится сохранить в допустимых пределах отклонения (рассогласования) ошибки между требуемыми и действительными значениями управляемых переменных при помо
Определение программного движения и управление движением
Потребности ракетной техники привели к совершенно новым задачам, поскольку кратковременное движение ракеты рассматривается как единый переходный процесс. Здесь возникла еще одна задача – опт
Модели автоматизированных систем управления
Всякая система управления с точки зрения ее функционирования решает три основные задачи: сбор и передача информации об управляемом объекте, переработка информации, выдача управляющих воздействий на
Формирование структуры системы
Структура формируется на основании сравнительного анализа альтернативных вариантов системы, обеспечивающих решение проблемы с учетом внешней среды и неопределенностей будущего функционирования.
Выбор основных проектных параметров системы
Формирование технического облика системы предполагает выбор рациональных значений основных проектных параметров системы, исходя из ее максимальной эффективности в принятых условиях применения.
Современное состояние САПР
Современное состояние САПР уже позволяет решать замкнутые задачи – реализовать сквозной процесс, включающий несколько этапов: анализ требований к изделию, разработка трехмерной модели изделия (в ря
Направления разработки проектной составляющей САПР
Направления разработки проектной составляющей САПР должны соответствовать ключевым направлениям развития проектируемых технических систем: прежде всего разрабатываются те САПР, внедрение которых в
Предпроектные исследования
Проектирование системы начинается с предпроектных исследований, в результате которых определяются цели системы, объем работ, вырабатываются критерии успешности проекта, оцениваются риски. В результ
Постановка задачи
Стадия постановки задачи включает: проведение системно-аналитического обследования и выработка концепции системы, разработка технического задания на проект.
Системно-аналитическое обсле
Проектирование системы
На стадии проектирования на основе анализа предметной области и требований к системе, сформулированных в ТЗ, разрабатываются основные архитектурные решения.
Архитектура процессов –
Архитектура программного обеспечения
Система состоит из двух видов программного обеспечения – общего и специального.
Общее программное обеспечение:
- программное обеспечение сетевого доступа к приложениям и БД
Организационное обеспечение системы
Сложность проектирования организационного обеспечения лежит в социальной, а не в технической сфере – задача психологов и психоаналитиков. Внедрение новых технологий обеспечивает неограниченный прям
Реализация и внедрение системы
Разработчики производят итеративное построение реальной системы на основе полученных в предыдущей фазе моделей, а также требований нефункционального характера. Конечные пользователи на этой фазе оц
Оценка конкурентоспособности
Оценку конкурентов рассматриваемой системы проводится в два этапа: выявление возможных конкурентов и сравнительный анализ конкурентов.
На первом этапе составляется общий список конкурентов
Метод определения чистой текущей стоимости.
Метод оценки приемлемости инвестиций на основе критерия NPV является базовым в современном инвестиционном анализе и широко применяется на практике.
Чистая текущая стоимость - NPV
Метод расчета рентабельности инвестиций
Рентабельность инвестиций - PI (profitability index) - это показатель, позволяющий определить, в какой мере возрастет стоимость фирмы (богатство инвестора) в расчете на 1 доллар (рубль, грив
Метод расчета внутренней нормы прибыли
Внутренняя норма прибыли (внутренний коэффициент окупаемости инвестиций, поверочный дисконт) - IRR (internal rate of return) - представляет собой уровень доходности средств, направленных на
Расчет периода окупаемости инвестиций
Период окупаемости инвестиций РР (payback period) - это срок, который необходим для возмещения суммы первоначальных инвестиций (рассчитанный без дисконтирования).
Если величины дене
Задачи управления проектами
Успешность деятельности предприятия зависит от непрерывной последовательности управленческих решений по инвестиции в проект и управление проектом. Эти решения базируются на анализе внешней среды кА
Хотите получать на электронную почту самые свежие новости?
Подпишитесь на Нашу рассылку
Наша политика приватности обеспечивает 100% безопасность и анонимность Ваших E-Mail

 Возникает вопрос о нахождении условий, при которых достаточно малое изменение начальных данных вызывает сколь угодно малое изменение решения, т.е. нахождения условий, при которых система управления, описываемая уравнениями (1) устойчива.
Возникает вопрос о нахождении условий, при которых достаточно малое изменение начальных данных вызывает сколь угодно малое изменение решения, т.е. нахождения условий, при которых система управления, описываемая уравнениями (1) устойчива. t0 справедливы неравенства
t0 справедливы неравенства [0, T] и сколь угодно малых ε > 0 и δ > 0 хотя бы для одного решения уi (t) , (i = 1, 2, . . . , n) неравенство (2) не выполняется при t
[0, T] и сколь угодно малых ε > 0 и δ > 0 хотя бы для одного решения уi (t) , (i = 1, 2, . . . , n) неравенство (2) не выполняется при t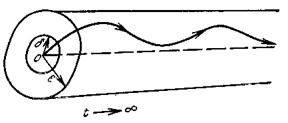 Если устойчивое решение уi* (t), (i = 1, 2, . . . , n) при t → ∞ удовлетворяет условию
Если устойчивое решение уi* (t), (i = 1, 2, . . . , n) при t → ∞ удовлетворяет условию ), необходимо, чтобы
), необходимо, чтобы





Новости и инфо для студентов