рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Образование
- /
- Основные характеристики ГТД.
Реферат Курсовая Конспект
Основные характеристики ГТД.
Основные характеристики ГТД. - раздел Образование, Функциональная схема пилотажного комплекса ЛА Газотурбинный Двигатель (Гтд) — Тепловой Двигатель, В Котором Газ Сжимается И...
Газотурбинный двигатель (ГТД) — тепловой двигатель, в котором газ сжимается и нагревается, а затем энергия сжатого и нагретого газа преобразуется в механическую работу на валу газовой турбины.
В отличие от поршневого двигателя, в ГТД процессы происходят в потоке движущегося газа.
Сжатый атмосферный воздух из компрессора поступает в камеру сгорания, туда же подаётся топливо, которое, сгорая, образует большое количество продуктов сгорания под высоким давлением. Затем в газовой турбине энергия газообразных продуктов сгорания преобразуется в механическую работу за счёт вращения струёй газа лопаток, часть которой расходуется на сжатие воздуха в компрессоре. Остальная часть работы передаётся на приводимый агрегат. Работа, потребляемая этим агрегатом, является полезной работой ГТД. Газотурбинные двигатели имеют самую большую удельную мощность среди ДВС, до 6 кВт/кг.
В качестве топлива могут использоваться любое горючее, которое можно диспергировать: бензин, керосин, дизельное топливо, мазут, природный газ, судовое топливо, водяной газ, спирт и даже измельченный уголь.
11. Режимы работы ГТД.под способами управления режимами работы двигателя понимают характер воздействия на регулир. орган двигателя. И через них на параметры работы процесса который и определяет режимы:
1)режим полного форсажа
n=nmax, T3*=T3*max, Тф*=Тф*мах,
2)режим частичного форсажа(при пилотировании)
n=nmax, T3*=T3*max, Тф*<Тф*мах,
3)режим максимальный бесфорсажный
n=nmax, T3*=T3*, р=рмах,
4)номинальный режим
n=(0,95-0,98)nmax, T3*<T3*max, р=(0,85-0,9)рмах ,
5)крейсерский режим(полет по курсу)
n=0,9nmax, р=(0,5-0,75)рмах ,
6)режим малого газа
n=(0,2-0,7)nmax, р=(0,03-0,05)рмах ,
6.1)Режим земного малого газа-для рулежа самолета по аэродрому.
6.2)Режим полетного малого газа-при посадке самолета.
По динамике различают режимы:
1)преходный режим с увеличением частоты наз-ся режимом разгона двигателя или режимом приемистости, при уменьшении частоты:режимом торможения(сброса)
2)режим запуска-это разгон ротора двигателя от нулевой частоты до частоты малого газа.
12. Подобные режимы ТРД.
1)режим полного форсажа
n=nmax, T3*=T3*max, Тф*=Тф*мах,
2)режим частичного форсажа(при пилотировании)
n=nmax, T3*=T3*max, Тф*<Тф*мах,
3)режим максимальный бесфорсажный
n=nmax, T3*=T3*, р=рмах,
4)номинальный режим
n=(0,95-0,98)nmax, T3*<T3*max, р=(0,85-0,9)рмах ,
5)крейсерский режим(полет по курсу)
n=0,9nmax, р=(0,5-0,75)рмах ,
6)режим малого газа
n=(0,2-0,7)nmax, р=(0,03-0,05)рмах ,
6.1)Режим земного малого газа-для рулежа самолета по аэродрому.
6.2)Режим полетного малого газа-при посадке самолета.
По динамике различают режимы:
1)преходный режим с увеличением частоты наз-ся режимом разгона двигателя или режимом приемистости, при уменьшении частоты:режимом торможения(сброса)
2)режим запуска-это разгон ротора двигателя от нулевой частоты до частоты малого газа.
13. Допустимые области режимов работы ГТД.
ГТД может работать нормально в строго определенной области режимов определяемом границами допустимых параметров: турбины ограниченный по мах частоте и t, исключения помпажа, камера сгорания
Ограничения:
1)по частоте
2)по темперетуре
3)зона установленной работы компрессора
∆М=Мт-Мк=2пJ*dn/ dt

1-линия nмах
2-линия Т3*мах
3-линия неустойчивой работы компрессора
4,5-линии неустойчивого горения в камере сгорания
6-линия соответствующая р=0
7-линия статических режимов работы двигателя, равновесные режимы.
14. Динамическая характеристика ТРД. одной из форм нагляд предст. динамики ТРД кот. отображаетрезультат решения нелин. сист уравнений, опис. ТРД как обьект регулир-я называется динамическая характеристика
 nпр-сетка ускорений
nпр-сетка ускорений
T=const-сетка изотерм
P=const-сетка изобар
Из свойств характеристик СУ следует что как на установившемся так и на переходных режимах работа двигателя ограничивается определенной допустимой областью режима работы. Поэтому САУ должна обеспечивать работу двигателя по заданным законам и допускать отклонения от заданных рабочих режимов которые не выходили бы из допустимой области.
15. Возможные законы управления и структурные схемы САУ ГТД.
Из св-в и характеристик СУ следует что как на установившихся так и на переходных режимах работы двигателя ограничевается опред-м допустимым областью реж работы, поэтому САУ должны обеспечивать работу по заданным законам и допуск отклонениями зад раб режимов кот-е не выходили бы из допустимой области. Необходимость след устройств в кот входит сист управления из:
-для вывода данных по заданному режиму работы должны быть: регулятор частоты, регулятор t газа, Ти
-чтобы параметры двигателя не привышали допустимых значений в сист упр
Законы управления структурной схемой САУ СУ
Рассмотрим особенности построения САУ ТРД
С нерегулируемым соплом:

nзад=nзад(αруд)уол отклонения рычага упр-я двигателем
16. Основные требования к САУ силовых установок.
Для САУ СУ существуют жесткие требования как величина допустимых динамических погрешностей как в отношении допустимых отклонений параметров на установившихся режимах работы, так и в отношении динамических погрешностей при переходных режимах. Требования завися от конкретного применяемого СУ. САУ СУ должны обеспечить:
1) необходимую точность работы и монотонность переходных процессов в широком диапазоне изменений параметров обьекта по режимам работы и условиям полета
2)обеспечить высокий уровень надежности и безопасности полета при min весе и габаритах аппаратуры.
Точность поддержки тяги +-2% на установившихся режимах.
Задан точность врпщения турбокомпрессора должна поддерж-ся с погрешностью не менее 0,3%

17. Замкнутые САУ частоты вращения с астатическим гидроприводом.
САУ частоты вращения по замкнутым схемам с компенсационным действием на двигатель
С точки зрения реализации САУ частоты вращения могут быть построены с использованием гидромеханических и электронных систем. Замкнутая САУ частоты вращения ротора с астатическим приводом
Применение астатич. гидропривода обеспечивает стабильные свойства системы n=nзад
Введение ИОС расширяет диапозон устойчивости режимов с одновременным уменьшением колебательности при приемлемой быстродействии
Wиос=Tup/(Tup+1)
18. Электронные САУ частоты вращения.
Электронные САУ часты вращения (аналог и цифр) дублируются упрощенной гидромеханической системой. Эти сист так же содержат гидромеханические элементы с помощью которого осуществляется изменение расхода топлива.
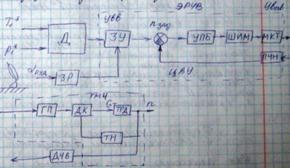
ЭРЧВ-электрический регулятор частоты вращения; Д-датчик; ЗР-задатчик режима; Зу-задающее устр-во;
УПБ-усилительно-преобр.блок; ШИМ-широтн импульсный модулятор; МТК-магнитный клапан топлива; -преобразователь частота-напряжение; ДЧВ-датчик частоты вращения; ДК-дозирующий кран; ГП-гидропривод(сервомотор); ЦВМ-цифровая вычеслительная машина; ГМЧ-гидромехан-я часть; ТН-топливный насос, который осущ. привод от ротора ТРД
19. Корректирующие устройства в САУ частоты вращения. Структурная схема САУ частотой вращения может быть представлена в виде рис. 1.2, где РЧВ – регулятор частоты вращения.
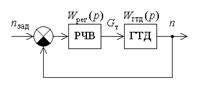
Рис. 1.1. Структурная схема САУ частотой вращения
Передаточная функция объекта управления – ГТД по частоте вращения [2]
 .
.
Для обеспечения требуемой высокой статической точности САУ частотой вращения выполняются, как правило, астатическими, при этом передаточная функция регулятора должна включать в себя интегрирующее звено, т.е.
 . При этом передаточная функция разомкнутой системы
. При этом передаточная функция разомкнутой системы
 ,
,
а передаточная функция замкнутой системы
 . (1.5)
. (1.5)
Однако для таких САУ характерно то, что время регулирования и максимальный заброс управляемой величины n даже для оптимального переходного процесса на максимальном режиме работы ГТД, в стендовых условиях является неприемлемо большим.
Расширить диапазон устойчивых режимов с одновременным устранением или уменьшением колебательности при приемлемом быстродействии и сохранением статической точности в САУ частотой вращения возможно за счёт применения в регуляторе корректирующего устройства, обладающего форсирующими свойствами, т.е. за счёт применения изодромного регулятора с передаточной функцией
 . (1.6)
. (1.6)
Смысл введения корректирующих устройств в САУ частотой вращения состоит в том, чтобы форсированием корректирующего устройства регулятора скомпенсировать инерционность объекта управления ГТД и тем самым улучшить динамические свойства САУ.
20. Анализ устойчивости САУ частоты вращения.
Структурная схема такой системы управления и направления прохождения сигналов могут быть представлены следующим образом (рис. 1.4):

Рис. 1.2. Структурная схема изодромного регулятора частоты
вращения ГТД
С учётом обозначенных на схеме передаточных функций звеньев, уравнения движения для звеньев примут следующий вид:
 ; (1.11)
; (1.11)
 ; (1.12)
; (1.12)
 ; (1.13)
; (1.13)
 , (1.14)
, (1.14)
где  .
.
Решая эту систему уравнений относительно Xn, получим следующее уравнение замкнутой системы
 .
.
(1.15)
Тогда передаточная функция САУ может быть записана так
 (1.16)
(1.16)
Передаточные функции отдельных звеньев САУ имеют вид:
центробежного тахометра сервомотора (гидропривода)
 ;
;  ;
;
Изодрома  ;
;
ГТД  .
.
 влияние коэффициента самовыравнивания двигателя
влияние коэффициента самовыравнивания двигателя
на устойчивость системы и переходные процессы, поэтому примем уравнение движения для двигателя в самом общем
виде, что соответствует передаточной функции
 .
.
Подставляя передаточные функции звеньев регулятора и двигателя в выражение для передаточной функции САУ, получим
 . (1.18)
. (1.18)
Устойчивость системы управления определим, применяя критерий Рауса-Гурвица,
 . (1.19)
. (1.19)
Раскрывая значения коэффициентов, получаем такое условие устойчивости.
 . (1.20)
. (1.20)
Отсюда видно, что запас устойчивости системы управления увеличивается с увеличением значения коэффициента самовыравнивания  , так как в этом случае значение неравенства возрастает. Это также означает, что с уменьшением частоты вращения, когда значение уменьшается, запас устойчивости также уменьшается, и переходные процессы могут ухудшаться. Предположив, что
, так как в этом случае значение неравенства возрастает. Это также означает, что с уменьшением частоты вращения, когда значение уменьшается, запас устойчивости также уменьшается, и переходные процессы могут ухудшаться. Предположив, что  , получим
, получим
 . (1.21)
. (1.21)
Это условие устойчивости практически всегда выполняется, но величина неравенства может оказаться недостаточной для получения требуемых запасов по устойчивости.
21. Анализ качества переходных процессов в САУ частоты вращения. Синтез САУ частоты вращения ?
Для управления режимами работы основного контура ГТД широко используются замкнутые САУ частотой вращения с применением всережимных регуляторов с астатизмом 1-го порядка. Такие регуляторы позволяют получить достаточно высокое качество переходных процессов во всем диапазоне условий эксплуатации. Структурная схема САУ частотой вращения приведена на рис. 5.7.

Рис. 5.7. Структурная схема САУ частотой вращения ГТД
Для ТРД одновальной схемы передаточные функции двигателя и регулятора выражаются так:
 ;
;  , (5.10)
, (5.10)
где  ,
,  – коэффициенты усиления двигателя и регулятора;
– коэффициенты усиления двигателя и регулятора;  ,
,  ,
,  – постоянные времени двигателя и регулятора.
– постоянные времени двигателя и регулятора.
Передаточная функция замкнутой системы по управляющему воздействию
 . (5.11)
. (5.11)
Условие устойчивости Рауса–Гурвица для данной САУ имеет вид
 (5.12)
(5.12)
откуда
 . (5.13)
. (5.13)
Влияние второго замкнутого контура регулирования того же двигателя, например контура управления механизацией компрессора, на устойчивость контура регулирования частоты вращения можно проследить на примере ТРД с регулируемыми направляющими аппаратами компрессора при выбранном законе  (рис. 5.8).
(рис. 5.8).
Рис. 5.8. Структурная схема регулирования ТРД с замкнутыми контурами по  и
и 
Уравнение ТРД при наличии двух регулирующих органов, изменяющих расход топлива в камеру сгорания и положение направляющих аппаратов, имеет вид
 . (5.14)
. (5.14)
Передаточную функцию для регулятора направляющего аппарата примем в виде
 , (5.15)
, (5.15)
где  ,
,  – коэффициент усиления и постоянная времени регулятора направляющего аппарата.
– коэффициент усиления и постоянная времени регулятора направляющего аппарата.
Характеристическое уравнение для рассматриваемой САУ определяется соотношением
 ,
,
откуда, раскрывая скобки и приводя подобные члены, получим
 (5.16)
(5.16)
В соответствии с критерием Рауса–Гурвица должно выполняться условие
 (5.17)
(5.17)
Зная численные значения параметров системы, можно построить области устойчивости, например, в координатах  ,
,  и оценить влияние контура регулирования на устойчивость всей системы. В общем случае при увеличении коэффициента область устойчивости системы уменьшается.
и оценить влияние контура регулирования на устойчивость всей системы. В общем случае при увеличении коэффициента область устойчивости системы уменьшается.
Для двигателей многовальных схем регулировать частоту вращения можно по каскадам высокого и низкого давлений. При этом динамика по контуру регулирования  остается практически такой же, как и для двигателя одновальной схемы. Объясняется это тем, что динамические свойства двигателей многовальных схем относительно частоты вращения каскада высокого давления описываются передаточной функцией, как для ТРД одновальной схемы.
остается практически такой же, как и для двигателя одновальной схемы. Объясняется это тем, что динамические свойства двигателей многовальных схем относительно частоты вращения каскада высокого давления описываются передаточной функцией, как для ТРД одновальной схемы.
Передаточная функция двигателя по каналу  имеет вид
имеет вид
 (5.18)
(5.18)
Если в канале регулирования использовать изодромный регулятор, то характеристическое уравнение замкнутой системы имеет четвертый порядок. В общем случае область устойчивости системы с регулятором несколько меньше, чем с регулятором .
Большое распространение получила схема регулирования частот вращения, изображенная на рис. 5.9.

Рис. 5.9. Схема регулирования частот вращения двухвального двухконтурного ГТД
На рис. 5.9 обозначено:  ,
,  – регуляторы частот вращения роторов высокого и низкого давлений соответственно;
– регуляторы частот вращения роторов высокого и низкого давлений соответственно;  – регулятор
– регулятор  ;
;  – регулятор соотношения частот вращения роторов (скольжения); ГМР – гидромеханический регулятор, в частности, имеющий передаточную фукнцию изодромного звена
– регулятор соотношения частот вращения роторов (скольжения); ГМР – гидромеханический регулятор, в частности, имеющий передаточную фукнцию изодромного звена  ; ФУ – функциональное устройство.
; ФУ – функциональное устройство.
Регуляторы основного контура выполняют функции дозирования топлива в основную камеру сгорания. Регулятор частоты вращения ротора высокого давления является всережимным, тогда как регулятор частоты вращения ротора низкого давления является ограничителем предельного значения. Взаимодействие регуляторов осуществляется через селектор, на вход которого могут быть подключены регуляторы (ограничители) других параметров ГТД ( ,
,  и т.д.).
и т.д.).
Регулятор соотношения частот вращения воздействует на настройку регулятора  , изменяя площадь реактивного сопла. В функциональном устройстве (ФУ) формируется требуемое соотношение между и , обеспечивающее высокую экономичность работы двигателя.
, изменяя площадь реактивного сопла. В функциональном устройстве (ФУ) формируется требуемое соотношение между и , обеспечивающее высокую экономичность работы двигателя.
– Конец работы –
Эта тема принадлежит разделу:
Функциональная схема пилотажного комплекса ЛА
Пилотажный комплекс ПК это комплекс оборудования осуществляющий... В ПК входят три основных функциональных системы система штурвального управления СШУ система траекторного...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Основные характеристики ГТД.
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.029 сек.
Новости и инфо для студентов