рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Спорт
- /
- Графічний розв’язок систем т лінійних нерівностей з двома змінними
Реферат Курсовая Конспект
Графічний розв’язок систем т лінійних нерівностей з двома змінними
Графічний розв’язок систем т лінійних нерівностей з двома змінними - раздел Спорт, ЛІНІЙНЕ ПРОГРАМУВАННЯ. Транспортна задача. ЦІЛОЧИСЛОВЕ ПРОГРАМУВАННЯ Дано Систему Т Лінійних Нерівностей З Двома Змінними ...
Дано систему т лінійних нерівностей з двома змінними
 (3.1)
(3.1)
Знак деяких або всіх нерівностей може бути „ ”.
”.
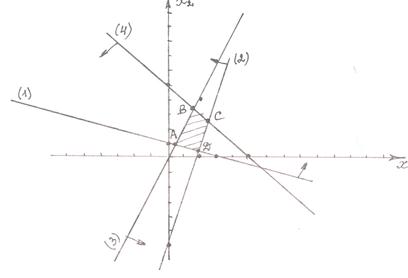
Розглянемо першу нерівність системи (3.1) у системі координат  . Побудуємо пряму
. Побудуємо пряму  , яка є граничною прямою. Ця пряма ділить площину на дві півплощини (1) і (2).
, яка є граничною прямою. Ця пряма ділить площину на дві півплощини (1) і (2).

Напівплощина (1) вміщує початок координат. Для визначення, з якого боку від граничної прямої розміщена задана напівплощина необхідно взяти довільну точку на площині (краще початок координат) і підставити координати цієї точки у нерівність. Якщо нерівність справедлива, то напівплощина звернена у бік цієї точки, якщо не справедлива – то у протилежний бік від точки. Напрямок напівплощини на малюнку позначається стрілкою.
Розв’язком кожної нерівності системи є напівплощина, яка вміщує граничну пряму і розміщена по одну сторону від неї.
Перетином напівплощин, кожна з яких визначається відповідною нерівністю системи, називається областю розв’язків системи (ОР).
Область розв’язків системи, яка задовольняє умовам невід’ємності ( ), називається областю невід’ємних або припустимих розв’язків (ОПР).
), називається областю невід’ємних або припустимих розв’язків (ОПР).
Приклад.Знайти ОР і ОПР системи нерівностей і визначити координати кутових точок ОПР.

Знайдемо ОР системи. Для цього побудуємо граничну пряму  і підставимо координати точки
і підставимо координати точки  у нерівність (1):
у нерівність (1):  Координати точки не задовольняють нерівності (1), тому розв’язком цієї нерівності є напівплощина, що не вміщує точки .
Координати точки не задовольняють нерівності (1), тому розв’язком цієї нерівності є напівплощина, що не вміщує точки .
(1)  При
При  При
При 
(2)  При
При  При
При 
(3)  При
При  При
При 
(4)  При
При  При
При 
Областю розв’язків і областю припустимих розв’язків є чотирьохкутник . Знайдемо кутові точки чотирьохкутника.
. Знайдемо кутові точки чотирьохкутника.


 .
.
 ;
;
 .
.

 .
.


 .
.
– Конец работы –
Эта тема принадлежит разделу:
ЛІНІЙНЕ ПРОГРАМУВАННЯ. Транспортна задача. ЦІЛОЧИСЛОВЕ ПРОГРАМУВАННЯ
Криворізький технічний університет... Кафедра економіки організації та управління підприємствами... МЕТОДИЧНІ ВКАЗІВКИ Кривий Ріг...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Графічний розв’язок систем т лінійних нерівностей з двома змінними
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.033 сек.
Новости и инфо для студентов