рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Философия
- /
- Вид работы: Курсовые Проекты
- /
- См ÷ X дискрет
Реферат Курсовая Конспект
См ÷ X дискрет
См ÷ X дискрет - Курсовой Проект, раздел Философия, МИКРОКОНТРОЛЛЕРЫ В СИСТЕМАХ УПРАВЛЕНИЯ Легко Определяется Число Дискрет, Соответствующее Уровню 50См: N= 50 ...
легко определяется число дискрет, соответствующее уровню 50см: N= 50 ∙ 240 / 3000 = 4.
В результате подстановки в решаемое блоком уравнение Y= (A/B)+C получается: 50 = (A / B) ∙ 4 + C; 3000= (A / B) ∙ 240 + С. Так как C= 50 – 4 ∙(A / B), то (A / B) = 12,5, а C=0.
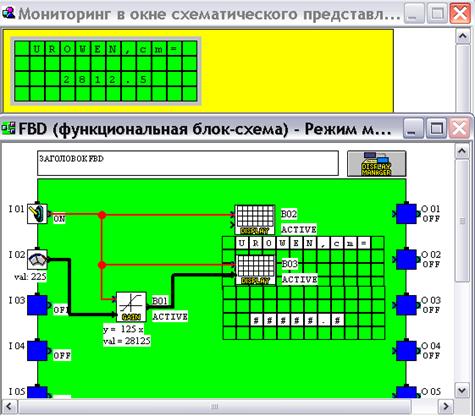
Рис.3.16
Если ввести в окне описания блока GAIN значения: A=125, B= 10, C=0, то на экране контроллера уровень будет отображаться целыми числами.
Чтобы получить отображение с точностью до одного десятичного знака, можно увеличить (A / B)в десять раз, т.е. до 125, а вывод на дисплей провести с коэффициентом (1/10). Для этого достаточно задать следующие значения: A=125, B=1, C=0, а блоком B 03 провести отображение результата измерения с кратностью (1 / 10). Фрагмент моделирования приведён на рис. 3.16.
В-2. Расчёт, выполненный в такой же последовательности для резервуара высотой один метр (в скобках на рис. 3.15), приводит к следующим результатам: (A / B) =0,417, C = 0. Поэтому можно выбрать вводимые в GAIN коэффициенты: A = 417, B = 1000, C = 0, а отображение выполнить при коэффициенте (1/1).
В.3. Никогда нельзя дать гарантию того, что при эксплуатации объекта фактический уровень среды в резервуаре не превысит тот, который принят за верхний. Чтобы предотвратить возможность перелива или, если этого избежать не удаётся, то минимизировать возможные нежелательные последствия этого, нужно предусматривать выдачу с контроллера сигналов оповещения об опасности выхода объекта за пределы штатного режима работы. Сигналы тревожного оповещения могут быть поданы как через выносные элементы (лампы, пищалки и т. п.), активизируемые программой контроллера, так и с использованием специализированных информационных панелей, предназначенных для мониторинга процесса. Можно посмотреть, как эту задачу реализовать через встроенный экран контроллера.
Дополним «схему» рис.3.16 так, чтобы она приняла вид рис. 3.17. Компаратор B 05 сравнивает выходной сигнал блока GAIN с уставкой в соответствии с заданием: > 30000, (как было условлено, 30000 – это число, в 10 раз превосходящее верхний контролируемый уровень среды). Как только выходной сигнал блока GAIN превысит значение 30000, компаратор активизирует выдачу прерывистого звукового сигнала (O 06) с частотой следования секундных импульсов (M 03) и вызовет формирование мигающей подсветки на позиции X = 11, Y= 3 экрана контроллера.
В нижней части рис. 3.17 совмещённо показаны два состояния окна мониторинга: с включённым и погашенным отображением мигающей метки. Формирование метки задано выбором кнопки Graph в окне описания блока B 06.
Поскольку выдача сигнала тревоги свидетельствует о выходе объекта из штатного режима работы, должны быть приняты меры принудительного возвращения его в обычный режим. В одном случае может стать достаточным некоторое увеличение порога сравнения в компараторе (неровность поверхности, волна, рябь при наливе), в другом – могут потребоваться средства для экстренного перекрывания питающей магистрали, в третьем - включение аварийного слива. Выбор конкретного решения зависит от характеристик объекта и тех материальных затрат, на которые можно пойти из соображений технической целесообразности и требований экологии.

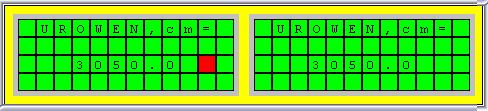
Рис.3.17
10.Блок DELAY  -блок задания временных задержек.Онпозволяет обеспечить задержку фронтов импульса на дискретном выходе блока по отношению к импульсу на дискретном входе. Величина задержки может задаваться в пределах:
-блок задания временных задержек.Онпозволяет обеспечить задержку фронтов импульса на дискретном выходе блока по отношению к импульсу на дискретном входе. Величина задержки может задаваться в пределах:
On Operation Delay (задержка на включение) …. (0 to 32767) • ∆t;
Off Operation Delay(задержка на выключение) …. (0 to 32767) • ∆t.
Коэффициент ∆t выбирается из трёх значений в списке Time Unit(единиц времени): 1s; 100ms; 10ms - для α – 2;
– Конец работы –
Эта тема принадлежит разделу:
МИКРОКОНТРОЛЛЕРЫ В СИСТЕМАХ УПРАВЛЕНИЯ
Лекции часов... Лабораторные работы часов... Курсовой проект I Назначение логических контроллеров...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: См ÷ X дискрет
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.019 сек.
Новости и инфо для студентов