рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Философия
- /
- Вид работы: Курсовые Проекты
- /
- Исполнение выходных цепей датчиков сигналов
Реферат Курсовая Конспект
Исполнение выходных цепей датчиков сигналов
Исполнение выходных цепей датчиков сигналов - Курсовой Проект, раздел Философия, МИКРОКОНТРОЛЛЕРЫ В СИСТЕМАХ УПРАВЛЕНИЯ Этот Вопрос Важен Для Того, Чтобы Выполнить Физическое Подключение Датчиков К...
Этот вопрос важен для того, чтобы выполнить физическое подключение датчиков к контроллеру, так как при этом всегда встают вопросы о необходимом числе проводов, цепей, которые надо использовать, и что куда подключить?
Наиболее простым получается соединение с датчиками, обладающими релейными выходами (рис.1.11). На клеммах 3-4-5 организована контактная группа, гальванически не связанная с остальными компонентами контроллера. Это позволяет подать входной сигнал на ПЛК через эту контактную группу от любого подключенного к ней источника питания.
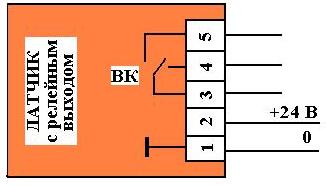
Рис. 1.11
Использование релейного переключения сигнала может вызвать дополнительные требования по обеспечению импедансных соотношений в прерываемой цепи. Импеданс – это полное или кажущееся сопротивление, учитывающее не только его активную часть, но также индуктивную и емкостную составляющие. Их соотношение оказывает влияние на характер переходных процессов в разрываемой цепи. Это может стать причиной возникновения перенапряжений на элементах схемы и, как следствие, - привести к искрообразованию, что совершенно недопустимо для очень широкого круга применений. Поэтому там, где это необходимо, сопряжение выполняют с применением специальных модулей – барьеров искробезопасности [ ] или по особо организованным интерфейсам [ ]. Повышение искробезопасности обеспечивают путём уменьшения значений питающих напряжений, ограничения номинальных величин емкости и индуктивности в разрываемой цепи, применения параметрических (увеличение доли активного сопротивления) и схемных приёмов предотвращения перенапряжений.

Часто встречается такое исполнение выходной цепи датчика,
а б
Рис. 1.12
при котором переключение выходного сигнала осуществляется бесконтактно, за счёт применения транзистора в выходном каскаде. Распространены два варианта таких выходов N – P – Nи P – N - P при трёхпроводном включении (рис.1.12). Оба варианта построены на каскаде с открытым коллектором, поэтому требуют включения внешнего резистора R. Если иметь в виду подключение датчиков с таким выходом к контроллеру, нужно помнить, что сигнал на вход ПЛК надо подавать плюсом на входную клемму относительно нулевой шины питания. Выполнить это условие можно, если снимать сигнал с R относительно корпуса у датчиков P – N – P типа (рис.1.12,а) или с коллекторно - эмиттерного перехода выходного транзистора у датчиков N – P – N типа (рис.1.12,б). Нетрудно заметить, что включение транзистора в первом случае приводит к выдаче выходного сигнала уровнем ON, тогда как во втором – уровнем OFF. Получаемая взаимная инверсия снимаемого сигнала с датчиков, обладающих различным исполнением выходов, легко учитывается при составлении программы контроллера.
Такого же типа выходные цепи широко используются для находящих широкое применение индуктивных, ёмкостных и других датчиков положения (приближения) [ ]. Их особенность только в том, что вместо транзистора ключевым элементом может использоваться релейный внутренний контакт ВК(рис.1.13). С предыдущим вариантом (рис.1.12) это исполнение выхода объединяют похожесть расположения ключевого элемента и одинаковость способа сопряжения с контроллером, а отличие - только в том, что ключ выбран контактным.

 а б
а б
Рис. 1.13
Обычно в сопроводительной документации на приобретаемые компоненты средств автоматизации указывается вид исполнения входных и выходных портов, приводятся их характеристики. Но номинал резистора R в схемах рис.1.12 и 1.13 скорее всего в этих характеристиках указан не будет. Причина этого в том, что для его определения требуется точно знать, что с чем сопрягается в данном случае и при каком соотношении параметров.
– Конец работы –
Эта тема принадлежит разделу:
МИКРОКОНТРОЛЛЕРЫ В СИСТЕМАХ УПРАВЛЕНИЯ
Лекции часов... Лабораторные работы часов... Курсовой проект I Назначение логических контроллеров...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Исполнение выходных цепей датчиков сигналов
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.018 сек.
Новости и инфо для студентов