рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Философия
- /
- Вид работы: Курсовые Проекты
- /
- Подключение источников сигналов
Реферат Курсовая Конспект
Подключение источников сигналов
Подключение источников сигналов - Курсовой Проект, раздел Философия, МИКРОКОНТРОЛЛЕРЫ В СИСТЕМАХ УПРАВЛЕНИЯ Входными Сигналами Переменного Тока Могут Быть Срабат...
Входными сигналами переменного тока могут быть срабатывания некоторых контактов релейного типа – в этом случае их ввод выполняется простым соединением соответствующего входа с шиной L(+) источника питания контроллера через этот входной контакт, как это показано для входов (5) на рис. 1.17. Входные сигналы от активных источников, имеющие вид переменных напряжений, могут быть подключены подобным образом, но при обязательном соблюдении правила: не допускается соединять шину питания L и общую (нулевую) точку N.

Входные сигналы постоянного тока могут быть аналоговыми и использоваться для управления каким–либо параметром пропорционально введённому значению входной величины (вход 6 на рис. 1.17). Как правило, этот вид ввода осуществляется вместе с выполнением аналого-цифрового преобразования.
· Из характеристик аналоговых входов становится понятной очень важная для практической работы процедура выполнения аналого-цифрового преобразования при вводе аналоговых величин.
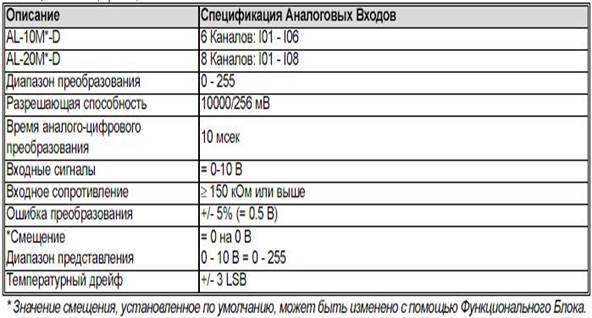
Начнем с того, что входной сигнал 10 В соответствует диапазону преобразования 0 ¸ 255 и разрешающая способность при этом равна (10000 / 256) мВ. Это можно представить себе иначе: восьмиразрядный АЦП (имеющий 28 - 1 = 255 дискретных уровней представления) преобразует установленный сигнал =10 В с разрешающей способностью 10000 / 256 = =39,0625 мВ. Поскольку результат преобразования выражается не кодом, а различными числами в диапазоне от 0 до 255, то можно было бы говорить не об аналого-цифровом, а об аналого-числовом преобразовании. Можно при этом оценивать величину вводимого сигнала следующим образом. Задаваемое число 1 соответствует 39,0625 мВ, число 100 – значению 3,906 В, а если задать число 200, то это будет означать 7,812 В. Иными словами, числа, получаемые в результате преобразования, есть не что иное, как число дискрет ценой 39,0625 мВ каждая, и это нужно учитывать при использовании соответствующего функционального блока, когда при описании параметров ввода аналогового сигнала предлагается ввести число от 0 до 255. Если схема в режиме отладки показала работоспособность при введённом числе 50 в поле описания АЦП, это означает, что на соответствующий вход следует подать напряжение, равное 50 × 39,0625 = 1953 мВ = =1,953 В. Таким образом осуществляется соответствие между «отвлечёнными» числами, занесёнными в поля описания блока, и внешней по отношению к контроллеру средой.
· Другая разновидность ввода сигналов постоянного тока связана с обеспечением сопряжения логических устройств. Известно, что принято различать элементы, работающие в положительной и отрицательной логике. Отличаются они тем, что в элементах положительной логики за логическую единицу принят высокий уровень напряжения, за логический нуль – низкий, а в отрицательной логике – наоборот. В правилах ввода сигналов постоянного тока в контроллер для этих целей предусмотрены два варианта. При А(“ - “ коммутации) соотношение уровней “логическая 1 / логический 0” принято как £ 4 В / ³ 18 В, а при В(“ + “ коммутации) этому же соответствует соотношение ³ 18 В / £ 4 В.
Настройка входов на тот или иной режим ввода понятна из рис. 1.17: в одном случае клемма А соединяется с минусом источника, а в другом случае клемма В – с плюсом.Следует иметь в виду, что такая настройка на вид применяемой логики предусмотрена не во всех типах контроллеров. Поэтому там, где этого нет, специфику работы датчика сигнала следует учитывать при составлении программы.
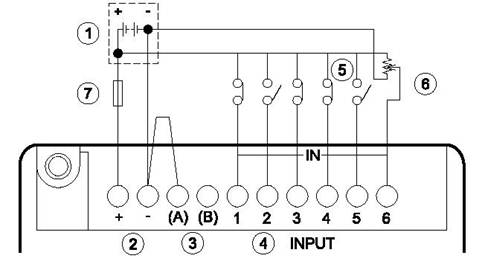

Рис. 1.17
– Конец работы –
Эта тема принадлежит разделу:
МИКРОКОНТРОЛЛЕРЫ В СИСТЕМАХ УПРАВЛЕНИЯ
Лекции часов... Лабораторные работы часов... Курсовой проект I Назначение логических контроллеров...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Подключение источников сигналов
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.018 сек.
Новости и инфо для студентов