рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Философия
- /
- Вид работы: Курсовые Проекты
- /
- Списка инструкций (СИ).
Реферат Курсовая Конспект
Списка инструкций (СИ).
Списка инструкций (СИ). - Курсовой Проект, раздел Философия, МИКРОКОНТРОЛЛЕРЫ В СИСТЕМАХ УПРАВЛЕНИЯ Перед Программированием На Языке Релейно-Контактных Схем Нужно Выполнить Неск...
Перед программированием на языке релейно-контактных схем нужно выполнить несколько предварительных этапов.
· Надо переопределить все составляющие оборудования в символы, понятные для контроллера. Он ведь ничего не знает о реле, выключателях, двигателях. Он может только оценить состояния входов ( включено / выключено) и по введённой в него программе принять решение о том, включить или выключить состояния тех или иных выходов.
· Заменить источник питания. В РКС для этого использованы две вертикальные прямые с обеих сторон окна описания программы. Можно считать одну из них плюсовой шиной питания, а другую – минусовой.
· Присвоить символы входам и выходам.
Как пройти эти этапы составления программы, показывается на примере простейшей задачи. На рисунке 1.16 приведена схема подачи питания на контроллер. Оно включается нажатием кнопки Start, а отключается кнопкой аварийного или штатного останова (с индексом 3). Если предположить, что некоторый контроллер по своей программе должен включить питание на контроллер, изображённый на рис.1.16, а под кнопками с ручным управлением понимать управляемые контакты, то в символике языка РКС это можно представить следующим образом.
Назначим символы входам и выходам.
Вход (X1) – нормально открытый (разомкнутый) контакт. При срабатывании кнопки Startэтот контакт замкнётся.
Вход (X2) – нормально закрытый (замкнутый) контакт. При срабатывании кнопки останова этот контакт разомкнётся.
Выход (Y1) – цепь питания контроллера, обозначающая в данном примере некоторую коммутируемую нагрузку.
Программа включения будет выглядеть так:

В реальных программах взаимодействует много сигналов, и отдельные строки записываются одна под другой (лестницей, ступеньками). Видимо поэтому язык РКС в англоязычной литературе часто обозначается как LAD или LD(Ladder Diagram), т.е. лестничных диаграмм.
Отметим, что рассмотренную задачу включения нагрузки можно представить иначе. Речь идёт о языке, который называется “Список Инструкций” (СИ). Поскольку среда программирования MELSEC MEDOC FX / WIN позволяет составлять программу и в одном языке, и в другом, то, чтобы избежать излишних повторений при их описании, одни и те же примеры будут рассмотрены параллельно и записаны в форматах представления обоих языков (РКС и СИ).
В языке РКС и типы контактов, и их взаимодействие отображаются в тексте программы путём указания вида их соединения.
В языке СИ и тип контакта, и способ взаимодействия обозначаются соответствующей командой.
Самые простые КОМАНДЫ обозначают только тип контакта.
1. Команда LD.
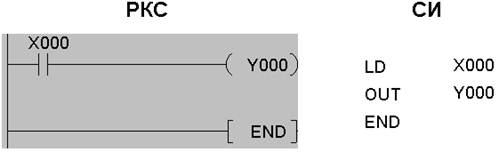
И графическое отображение  в РКС, и команда LDв СИ обозначают нормально открытый (незамкнутый) контакт. При замыкании X0 выход Y0 перейдёт в состояние ON (включено).
в РКС, и команда LDв СИ обозначают нормально открытый (незамкнутый) контакт. При замыкании X0 выход Y0 перейдёт в состояние ON (включено).
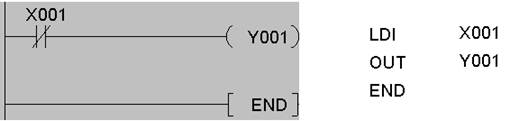
2. Подобно этому символ  и команда LDI обозначают нормально закрытый (замкнутый) контакт X1, при срабатывании которого выход Y1 перейдёт в состояние OFF (выключено).
и команда LDI обозначают нормально закрытый (замкнутый) контакт X1, при срабатывании которого выход Y1 перейдёт в состояние OFF (выключено).
Значительная часть КОМАНД определяет характер взаимодействия сигналов.
3. Команда AND –логическое умножение (конъюнкция). Результатом операции является «истина», если оба операнда принимают значение «истина», и «ложь» - во всех других случаях.

– Конец работы –
Эта тема принадлежит разделу:
МИКРОКОНТРОЛЛЕРЫ В СИСТЕМАХ УПРАВЛЕНИЯ
Лекции часов... Лабораторные работы часов... Курсовой проект I Назначение логических контроллеров...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Списка инструкций (СИ).
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.011 сек.
Новости и инфо для студентов