рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Философия
- /
- Вид работы: Курсовые Проекты
- /
- А. Язык программирования – ФБД (FBD).
Реферат Курсовая Конспект
А. Язык программирования – ФБД (FBD).
А. Язык программирования – ФБД (FBD). - Курсовой Проект, раздел Философия, МИКРОКОНТРОЛЛЕРЫ В СИСТЕМАХ УПРАВЛЕНИЯ На Рис. 4.2 Приведена Программа, Написанная На Языке Фбд В Среде Logo! Soft –...
На рис. 4.2 приведена программа, написанная на языке ФБД в среде LOGO! Soft – Comfort [1], и обеспечивающая выполнение всех действий, составляющих работу схемы рис.4.1. Входные сигналы контроллера формируются подключенными к его портам ёмкостными датчиками положения; на программе они представлены левыми блоками I1, I2, I3, I4. Выходные сигналы контроллера и, следовательно, точки выдачи их на исполнительные или управляющие устройства – представлены правыми блоками Q1, Q2, Q3 и Q4. Блок B006 – это таймер, запускающийся в момент срабатывания датчика Д 1 на время, задающее длительность работы привода мешалки. Блоки В003 и В009 – это R-S триггеры, остальное – обычная логика.
Работу программы удобно проследить по последовательности выполнения одного цикла. В исходном состоянии все датчики фиксируют уровень жидкости ниже уровня их установки, то – есть все входные сигналы равны нулю, выходные – тоже, что означает закрытое состояние всех клапанов.
Режим смешения запускается нажатием кнопки «ПУСК». Для заполнения смесителя первым компонентом нужно обеспечить включённое состояние клапана Кл 1 с момента нажатия кнопки ПУСК до срабатывания датчика Д 2. Так как кнопка ПУСК предполагается не имеющей фиксации, то, чтобы не было необходимости удерживать её в нажатом состоянии в течение длительного времени, целесообразно запомнить её состояние с помощью R-S триггера B003 путём подачи сигнала включения на установочный S –вход. Выходной сигнал B003 вместе с инвертированным выходным сигналом датчика Д 2, объединённые конъюнктором B002, обеспечат открытое состояние Кл 1 до момента включения Д 2. Датчик Д 3 большую часть времени будет замкнут, но это ничего пока не сможет изменить. Когда замкнётся Д 2, сигнал I3 =1, пройдя через инвертор B001, снимет единицу с верхнего входа B002 и клапан Кл 1 выключится.
С этого момента должен быть включен второй клапан. Это обеспечивает конъюнктор B004, единичные состояния всех трёх входов которого характеризуют создавшуюся ситуацию следующим образом:
-первый компонент залит, поэтому датчик Д 2 продолжает оставаться в состоянии, соответствующем единичному значению сигнала I3;
-выходной сигнал триггера B003 равен логической единице, так как кнопка «ПУСК» была нажата в начале цикла работы, а сигнал сброса триггера придет позже. Этих двух цепей было бы вполне достаточно для открытия Кл 2, но чтобы потом, по достижении уровня заполнения резервуара вторым компонентом, можно было выключить Кл 2 и переключиться на перемешивание смеси, введена цепь от датчика Д 1 на конъюнктор B004 через инвертор B005.
-датчик Д 1 продолжает находиться в исходном состоянии, I2 = 0 и изменят они своё состояние только после окончания заливки второго компонента, которая в рассматриваемый момент ещё не начиналась;
Иначе говоря, клапан второй откроется сразу после срабатывания датчика Д 2, и будет находиться в этом состоянии до срабатывания датчика Д 1.
Когда он сработает, I2 примет значение высокого уровня (ON), включится привод мешалки на время, задаваемое программой как выдержка времени таймера B006.

Рис. 4.2
Программа не предусматривает непрерывной циклической работы, поэтому каждое повторение цикла приготовления смеси активизируется нажатием кнопки «ПУСК».
Таким образом, программа работы контроллера на языке ФБД представляет собой набор отдельных блоков, каждый из которых означает выполнение вполне определённой функции. Совокупность всех блоков вместе с объединяющими их связями и представляет собой программу, обеспечивающую работоспособность объекта.

Рис. 4.3
При входе в программу LOGO! Soft- Comfort (рис. 4.3) предоставляется возможность выбора одного из двух языков программирования: FBD или LAD.
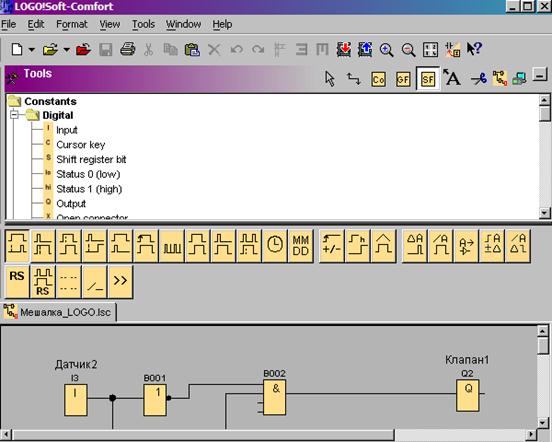
Рис. 4.4
В раскрывшемся окне после выбора языка программирования
FBD кроме традиционных для WINDOWS элементов экрана представлены средства формирования и отладки программ. По горизонтали на линейке Tools(рис. 4.4) расположены кнопки C0 , GF и SF , позволяющие вызвать на экран определённые наборы функциональных блоков, которые можно также ввести из дерева инструментов в левой части панели. Выбор переносимых из меню блоков в поле размещения программы и указание места их расположения на панели осуществляются не «перетаскиванием», а простым щелчком левой клавиши мыши в нужном месте экрана. Линии соединения блоков выполняются «рисованием» мышью при нажатой левой клавише.
Нижняя панель представляет собой поле для размещения формируемой программы. Кнопка  позволяет поменять используемый в данный момент язык программирования, а
позволяет поменять используемый в данный момент язык программирования, а  - включить режим симуляции (моделирования) программы. Этот режим используется для проверки правильности работы программы, так как в нём отображаются состояния входных и выходных цепей (рис. 4.5).
- включить режим симуляции (моделирования) программы. Этот режим используется для проверки правильности работы программы, так как в нём отображаются состояния входных и выходных цепей (рис. 4.5).
 Рис. 4.5
Рис. 4.5
Программа управления смешением (рис.4.2) соответствует применению датчиков с выходом типа P-N-P, при котором единичный сигнал (уровень ON) формируется на выходе датчика при его срабатывании. Таким выходом обладает датчик E2K-C25MF1. В стенде лабораторной работы применены датчики E2K-C25ME1, имеющие тип выхода N-P-N. Эти датчики имеют высокий уровень сигнала (ON) при выключенном состоянии, а при срабатывании изменяют его на уровень OFF. Поскольку уровни выходных сигналов датчиков E2K-C25ME1 в различных их состояниях инвертировались по отношению к тем, которые формировали датчики E2K-C25MF1, программа, учитывающая эти изменения, несколько видоизменяется и принимает вид, изображенный на рис. 4.6.
Она отличается от программы на рис. 4.2 тем, что во всех входных цепях (кроме кнопки ПУСК) вместо связей, которые непосредственно соединяли датчики с другими блоками, использованы соединения через инвертор, а те блоки, которые подключались к датчикам через инверторы, в схеме на рис. 4.6 соединены напрямую.
 |
Рис. 4.6
Проверка правильности работы программы в режиме имитации начинается с установления исходных уровней выходных сигналов датчиков – все в состоянии ON. После включения кнопки ПУСК сигналы датчиков переключаются в OFF по мере заполнения резервуара в следующей последовательности: Д3, Д2, Д1. В самом начале выгрузки перемешанной смеси сбрасывается в ноль триггер B003, датчики начнут возвращаться в исходное состояние ON в последовательности Д1, Д2, Д3, и установка вернётся в исходное состояние.
Выполнение следующего цикла работы возможно лишь после повторного нажатия кнопки ПУСК.
Представляет интерес перевести работу установки в режим непрерывного повторения цикла дозирования и смешения без необходимости нажатия кнопки ПУСК, т.е. снабдить её средствами автоматического перезапуска. Для этого дополним программу на рис. 4.6 одним фрагментом, обозначенным на рис. 4.7 штриховым контуром.
Сигнал выключения триггера B010, совпадающий с моментом окончания выгрузки ранее подготовленной дозы, через инвертор B004, формирователь укороченного импульса B011 и дизъюнктор B012 запускает триггер B003 после окончания предыдущего цикла точно так же, как в схеме рис. 4.6 это делалось нажатием кнопки ПУСК. Но если ограничиться только этим, возобновление очередного цикла работы будет осуществляться независимо от состояния кнопки ПУСК. Остановить исполнение программы будет затруднительно.
 Рис. 4.7
Рис. 4.7
Чтобы программа не теряла контроля за состоянием пусковой кнопки, т.е. чтобы установку можно было не только включать кнопкой ПУСК, но и выключать её повторным нажатием, выход кнопки подаётся через счётный триггерB013 и конъюнктор B014. При таком соединении B014 будет переключать соединённые с его выходом блоки только при том условии, что кнопка ПУСК перед этим была однократно нажата (B013 установлен в состояние ON), и предотвратит повторение цикла в случае её повторного нажатия (B013 будет сброшен в состояние OFF). За пределами штрихового контура на рис. 4.7 показаны те функциональные блоки программы на рис. 4.6, в разрывы соединений которых включается вводимый фрагмент.
Итоговый вариант программы, полученной после включения фрагмента рис. 4.7 в программу (рис. 4.6), приведен на рисунке 4.8 и может быть введен в контроллер для исполнения.
 Рис. 4.8
Рис. 4.8
– Конец работы –
Эта тема принадлежит разделу:
МИКРОКОНТРОЛЛЕРЫ В СИСТЕМАХ УПРАВЛЕНИЯ
Лекции часов... Лабораторные работы часов... Курсовой проект I Назначение логических контроллеров...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: А. Язык программирования – ФБД (FBD).
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.018 сек.
Новости и инфо для студентов