Коммуникационные порты контроллера - Курсовой Проект, раздел Философия, МИКРОКОНТРОЛЛЕРЫ В СИСТЕМАХ УПРАВЛЕНИЯ Применение Контроллеров Для Различного Рода Задач Управления [4,5] Невозможно...
Применение контроллеров для различного рода задач управления [4,5] невозможно без выполнения физических соединений между компонентами схемы. Эти вопросы рассматриваются на примере a-контроллера MITSUBISHI, и первые сведения, с которыми обязательно нужно ознакомиться, касаются расположения органов управления, вариантов подключения входных, выходных и питающих цепей, изучения технических характеристик и средств программирования.
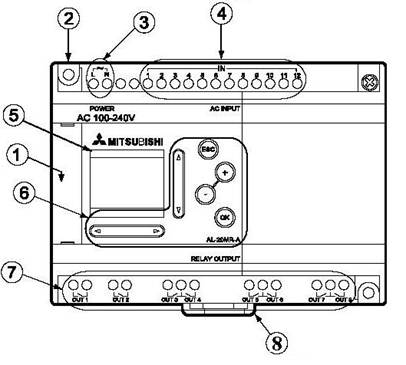
Внешний вид одного из контроллеров семейства a со стороны лицевой панели показан на рис. 1.15.
Контроллеры этого семейства выпускаются в нескольких вариантах, отличающихся между собой числом входов и выходов, напряжением питания (220 В или = 24 В), типами выходов (реле или транзистор). По соотношению напряжений и токов входных сигналов можно определить сопротивления входных цепей.
Под съёмной крышкой (1) находится разъём соединительного кабеля для подключения контроллера к компьютору. Через этот кабель подготовленная в отладочной среде программа загружается в контроллер, через него можно, при желании, осуществлять мониторинг управляемого процесса с компъютора. Составлять или редактировать программу можно и с помощью клавиатуры (6), а номерами 3, 4 и 7 обозначены клеммы подачи питающих напряжений и порты подключения входных и выходных устройств.
Лекции часов... Лабораторные работы часов... Курсовой проект I Назначение логических контроллеров...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ:
Коммуникационные порты контроллера
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
Характерные черты и сферы применения контроллеров.
Потребность в применении программируемых логических контроллеров (ПЛК) обозначилась в 60 – х годах прошлого века. Для многих технических задач применяемые средства автоматизации строились преимущ
Состав контроллера, связь с объектом, виды сигналов
Из блок – схемы системы управления некоторым объектом (рис. 1.1), являющимся локальной подсистемой некоторого технологического процесса, можно хотя бы предварительно установить функции, которые вы
Исполнение выходных цепей датчиков сигналов
Этот вопрос важен для того, чтобы выполнить физическое подключение датчиков к контроллеру, так как при этом всегда встают вопросы о необходимом числе проводов, цепей, которые надо использовать, и ч
Подключение питающих напряжений
Контроллеры серии a в зависимости от модели могут быть запитаны от источников постоянного или переменного напряжения, но правила их подключения остаются неизменными:
а) ли
Подключение источников сигналов
Входными сигналами переменного тока могут быть срабатывания некоторых контактов релейного типа – в этом случае их ввод выполняется простым соединением соответствующего входа
Списка инструкций (СИ).
Перед программированием на языке релейно-контактных схем нужно выполнить несколько предварительных этапов.
· Надо переопределить все составляющие оборудования в символы, понятные для контр
Как это работает в нашем случае?
- Уровень воды ниже X0. Датчики X0 и X1 включены, реле М1 сработало, поэтому выход Y0 (насос) включен.
- Вода между уровнями X0 и X1. Датчики X1=1, X0=0, но реле М1 останется включенным че
Программирование на языке
функционально – блоковых диаграмм ФБД (FBD)
ФБД – это язык программирования, который по способу формирования программы контроллера напоминает процесс соста
См ÷ X дискрет
легко определяется число дискрет, соответствующее уровню 50см: N= 50 ∙ 240 / 3000 = 4.
В результате подстановки в решаемое блоком уравнение Y= (A/B)+C получается:
Ms - для α.
Особенности использования блока DELAY:
Задержка на включение не может быть больше времени включенного состояния I 01(рис.3.15).
А. Язык программирования – ФБД (FBD).
На рис. 4.2 приведена программа, написанная на языке ФБД в среде LOGO! Soft – Comfort [1], и обеспечивающая выполнение всех действий, составляющих работу схемы рис.4.1. Входные сигналы контроллера
Б. Язык программирования – РКС (LAD).
Представление работы дозатора (рис. 4.1) в формате языка программирования РКС может быть получено в той же среде программирования простым переключением кнопки
Alpha – Programming
Среда программирования Alpha – Programming используется при составлении программ только на языке ФБД для логических контроллеров " - серии фирмы MITSUBISHI
Регулирование расхода газообразных или жидких сред.
Регулировать расход, т.е. скорость потребления продукта в массовом или объёмном выражении (m / dt или V / dt), приходится при управлении такими технологическими пр
Некоторые элементы систем автоматизации
1. В тех задачах автоматизации, которые связаны с регулированием или поддержанием на определённом уровне температурно – влажностных режимов (автоматизация теплиц, обеспечение комфо
Хотите получать на электронную почту самые свежие новости?
Подпишитесь на Нашу рассылку
Наша политика приватности обеспечивает 100% безопасность и анонимность Ваших E-Mail








Новости и инфо для студентов