рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Философия
- /
- Вид работы: Курсовые Проекты
- /
- Ms - для α.
Реферат Курсовая Конспект
Ms - для α.
Ms - для α. - Курсовой Проект, раздел Философия, МИКРОКОНТРОЛЛЕРЫ В СИСТЕМАХ УПРАВЛЕНИЯ Особенности Использования Блока Delay: Заде...
Особенности использования блока DELAY:
Задержка на включение не может быть больше времени включенного состояния I 01(рис.3.15).
Задержка на выключение (она может быть реализована только в том случае, если за время включённого состояния I 01 выход блока B 01 на рис.3.18 успел перейти в состояние ON) отрабатывается блоком, даже если она задана по максимуму отведённых значений.

Рис.3.18
Р
11. Блок TIME SW  - реле времени. Он предоставляет большие возможности по заданию управляющих воздействий, происходящих «по расписанию» в соответствии с вводимыми временными установками. В окне диалога выбор Open / New (открыть / новый) можно задать включение (ON) и выключение (OFF) выходного сигнала блока в конкретное время (часы, минуты), задаваемое в поле Setting Time (установка времени) с дискретностью в один день или ежедневно (Daily), с конкретизацией по целым неделям месяца или месяцам в целом (Everi Week), а также по конкретной дате.
- реле времени. Он предоставляет большие возможности по заданию управляющих воздействий, происходящих «по расписанию» в соответствии с вводимыми временными установками. В окне диалога выбор Open / New (открыть / новый) можно задать включение (ON) и выключение (OFF) выходного сигнала блока в конкретное время (часы, минуты), задаваемое в поле Setting Time (установка времени) с дискретностью в один день или ежедневно (Daily), с конкретизацией по целым неделям месяца или месяцам в целом (Everi Week), а также по конкретной дате.

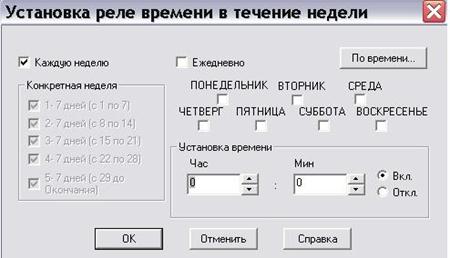
Перечисленные возможности позволяют запрограммировать достаточно сложные расписания работы, охватывающие длительные интервалы времени, составить программы работы различных автоматических устройств.
12. Блок  - выполняет функцию модуляции ширины импульсов. Благодаря широтно– импульсной модуляции (ШИМ) достигается возможность плавного изменения величины выходного сигнала. До сих пор говорилось только о том, как ввести изменяемый по величине входной сигнал, но управление выходом велось исключительно по принципу «включено / выключено». Только сейчас появилась возможность говорить о плавном изменении какого – либо выходного параметра, допустим, о регулировании скорости вращения электрической машины, об управлении температурой объекта за счёт регулируемого электропитания нагревательных элементов.
- выполняет функцию модуляции ширины импульсов. Благодаря широтно– импульсной модуляции (ШИМ) достигается возможность плавного изменения величины выходного сигнала. До сих пор говорилось только о том, как ввести изменяемый по величине входной сигнал, но управление выходом велось исключительно по принципу «включено / выключено». Только сейчас появилась возможность говорить о плавном изменении какого – либо выходного параметра, допустим, о регулировании скорости вращения электрической машины, об управлении температурой объекта за счёт регулируемого электропитания нагревательных элементов.
В простейшем варианте это можно представить следующим образом. Задающее воздействие в виде уровня напряжения определяет температуру, до которой нужно нагреть объект. Фактическая температура измеряется датчиком, сигнал преобразуется в напряжение, которое сравнивается с напряжением задатчика. Их разность, представляющая собой ошибку регулирования, после усиления (блоки, позволяющие это сделать, нами уже рассматривались) подаётся на аналоговый вход блока PWM, который формирует широтно – модулированное напряжение, среднее значение которого пропорционально сигналу рассогласования. Это напряжение через выходной порт контроллера увеличивает ток в нагревательном элементе, температура объекта приближается к задаваемой.

Б
Б
В диалоговом окне блока задаётся длительность периода в диапазоне от 0,1 до 3276,7 секунд. В окне Duty – количество процентов ( можно задать от 0 до 100, но введено 12%) от этого периода, в течение которых выходной сигнал принимает значение ON, а в оставшуюся часть периода – OFF. Если теперь в поле Duty ввести 90%, то, как это можно заметить из рис. 3.19, среднее значение выходного напряжения блока (его уровень показан штриховыми линиями) Uвых. ср. = [(введённое значение в %)• Uпит ] /100 увеличится.

Б
Рис. 3.19
Возможность изменять среднее значение напряжения с помощью этого блока – очевидна. Но изменение это выполнять вручную, с клавиатуры, неинтересно, да и пользы мало. Поэтому надо сделать так, чтобы уровень выходного напряжения стал зависящим от какого – либо сигнала, и им можно было бы управлять «автоматически».
Сделать это нетрудно: достаточно лишь на аналоговый вход блока PWM подать сигнал от того функционального блока программы, который отслеживает изменения мгновенного значения управляющего сигнала. При этом тот временной интервал, который задаётся процентной долей периода и характеризуется активным уровнем сигнала, будет определяться величиной этого сигнала.

Использование блока PWMобеспечивает хоть и достаточные, но не совсем удобные возможности для вывода аналоговых управляющих воздействий через порт дискретного выхода контроллера. Дискретная форма ШИМ - сигнала (рис.3.19), выводимого через этот порт, с точки зрения средних значений не может считаться нормированным сигналом. Для того, чтобы обеспечить его сопрягаемость с нормированными параметрами входа исполнительных устройств (краны, задвижки, частотные преобразователи и т.д.), его надо подвергнуть промежуточным преобразованиям в такой последовательности: фильтрация, сглаживание фильтром низкой частоты и преобразование в один из нормированных сигналов. Для последнего этапа такого преобразования вполне подходят специализированные модули фирмы DATAFORTH [ПРОСОФТ, 2005/06,стр. 5 - 3]. Модули с входным сигналом 0 ÷ 5 В преобразуют его :
SCM5B392 – 01 в токовый сигнал 4 ÷ 20 mA,
SCM5B39 – 03 в токовый сигнал 0 ÷ 20 mA,
а модуль SCM5B392 - 03 входной сигнал 0 ÷ 10 В преобразует в токовый 4 ÷ 20 mA.
13.В разных средах программирования для некоторых моделей ПЛК предусмотрен блок аналогового выхода, который в Alpha Programming имеет обозначение  .
.
14.Блок  реализует функцию одновибратора. Его назначение состоит в формировании длительности одиночного импульса при поступлении на вход блока управляющего сигнала. Начало выходного импульса всегда совпадает с передним фронтом входного дискретного сигнала. Длительность формируемого импульса задаётся в окне описания режима работы блока, но отрабатывается в зависимости от установленного одного из двух режимов. В первом режиме – длительность выходного импульса не зависит от времени нахождения входного сигнала в состоянии ON. Во втором – длительность выходного сигнала не может превышать время нахождения разрешающего сигнала на уровне ON. По сути дела блок позволяет получить из входного импульса произвольной длительности один - единственный импульс требуемой длительности.
реализует функцию одновибратора. Его назначение состоит в формировании длительности одиночного импульса при поступлении на вход блока управляющего сигнала. Начало выходного импульса всегда совпадает с передним фронтом входного дискретного сигнала. Длительность формируемого импульса задаётся в окне описания режима работы блока, но отрабатывается в зависимости от установленного одного из двух режимов. В первом режиме – длительность выходного импульса не зависит от времени нахождения входного сигнала в состоянии ON. Во втором – длительность выходного сигнала не может превышать время нахождения разрешающего сигнала на уровне ON. По сути дела блок позволяет получить из входного импульса произвольной длительности один - единственный импульс требуемой длительности.
Одним из возможных примеров применения блока ONE SHOT рассмотрим формирование сигналов включения и отключения трёхфазной нагрузки через магнитный пускатель от контроллера. Схема магнитного пускателя без устройств защиты, приведенная на рис. 3.20, содержит три силовых СК и один блокировочный БК контакты и обмотку контактора ОК. При нажатии кнопки Пуск потечёт ток по цепи: фаза C– ОК – кнопка Пуск – кнопка Стоп – фаза B.

Рис. 3.20
Контактор сработает, нагрузка окажется включенной на напряжение сети, так как силовые контакты СК замкнутся. Но вместе с ними замкнётся блокировочный контакт БК, который зашунтирует кнопку Пуск. С этого момента кнопку Пуск нет необходимости удерживать в нажатом состоянии, так как ток через ОК сможет протекать через БК. Такое состояние сохраняется до тех пор, пока не будет нажата кнопка Стоп. Обмотка контактора обесточится, контактные группы разомкнутся, а нагрузка отключится.
Так происходит ручное управление включением нагрузки (через кнопочный пульт). Для автоматического управления (по программе) надо выходными цепями контроллера выполнить те же функции, которые выполняли управляющие кнопки.
Быстродействие контактора при включении и выключении достаточно высокое для того, чтобы утверждать: длительность сигналов управления через кнопки Пуск и Стоп может быть небольшой.
По потребностям управления нужны один замыкающий и один размыкающий контакты. Если управляющее устройство такими контактами располагает, то, для перехода с ручного управления (через кнопки) на автоматическое, надо заменить кнопку Пуск замыкающим контактом, а кнопку Стоп – размыкающим.
Если в наборе выходных средств контроллера нет размыкающего контакта, его можно организовать применением промежуточного реле. Контроллер своим замыкающим контактом включит обмотку реле, а размыкающие контакты этого реле - разорвут цепь обмотки контактора. Мера, конечно, вынужденная, но она легко реализуемая.Б
Схема одного из типов реле приведена на рис. 3.21.

Б
Рис. 3.21
Б
При подключении выводов “с “ - “д“ обмотки к источнику питания по обмотке потечёт ток; пропорционально квадрату ампервитков ( I • w )2 , где w – число витков обмотки, создаётся электромагнитное усилие, заставляющее якорь 10 притянуться к сердечнику 12. Поворачиваясь по часовой стрелке, якорь своей левой консолью переместит вверх штифт 4, что, в свою очередь, приведёт к размыканию нормально замкнутой контактной пары 7 – 8. Таким образом, каждое срабатывание реле будет вызывать размыкание контактов на линии “а “ - “б “.
Чтобы теперь обеспечить и включение, и выключение нагрузки через контактор от контроллера, надо выполнить следующее. Подключить выход Q1 контроллера (рис. 3.22) вместо кнопки ПУСК – этим достигается возможность включения нагрузки. Выключение нагрузки станет возможным, если выводы “а“ - “б “ контактной группы реле подключить вместо кнопки СТОП, а обмотку реле ( выводы “с” – “д") включить последовательно через выходной контакт Q2 контроллера с питанием от источника напряжения, соответствующего паспортным характеристикам реле.
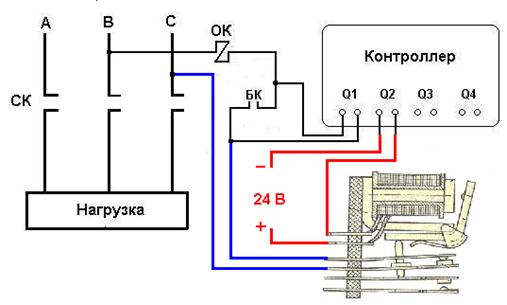
Рис. 3.22
Ранее говорилось, что для срабатывания и отпускания контактора достаточно коротких импульсов. В указываемой ниже программной реализации переключения контактора (рис. 3.23) эту длительность (500ms) задают блоки ONE SHOT с номерами B 09 и B 04. Под сигналом I 02 предполагается дискретный выход того блока программы, который управляет состоянием выхода. Оба выхода контроллера при такой реализации включаются на короткие промежутки времени, от источников питания потребляется минимальный ток, ни один из компонентов схемы не перегревается. Поддержание контактора в замкнутом состоянии СК обеспечивается питанием ОК от силовой сети переменного тока через блокирующий контакт БК.
Необходимую длительность импульсов включения и выключения нагрузки от контроллера обеспечивает использование в его программе двух блоков ONE SHOT.

Рис. 3.23
15. Блок - ПИД – регулятор. Даже в контроллерах, относящихся к рассматриваемой в данной работе «лёгкой группы», в некоторых типах (Alpha – 2, например) предусмотрена возможность управления процессом на основе любого из применяющихся в настоящее время видов регулирования. Применение этого блока хорошо согласуется с применением блока PWM, а также с наличием у некоторых контроллеров транзисторных выходных цепей, которые позволяют передавать с контроллера выходные управляющие объектом сигналы в виде плавно регулируемых воздействий.
- ПИД – регулятор. Даже в контроллерах, относящихся к рассматриваемой в данной работе «лёгкой группы», в некоторых типах (Alpha – 2, например) предусмотрена возможность управления процессом на основе любого из применяющихся в настоящее время видов регулирования. Применение этого блока хорошо согласуется с применением блока PWM, а также с наличием у некоторых контроллеров транзисторных выходных цепей, которые позволяют передавать с контроллера выходные управляющие объектом сигналы в виде плавно регулируемых воздействий.
– Конец работы –
Эта тема принадлежит разделу:
МИКРОКОНТРОЛЛЕРЫ В СИСТЕМАХ УПРАВЛЕНИЯ
Лекции часов... Лабораторные работы часов... Курсовой проект I Назначение логических контроллеров...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Ms - для α.
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.014 сек.
Новости и инфо для студентов