рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Механика
- /
- Автоматический радиопеленгатор АРП-75
Реферат Курсовая Конспект
Автоматический радиопеленгатор АРП-75
Автоматический радиопеленгатор АРП-75 - раздел Механика, Средства электропроводной связи. Назначение, состав, классификация, особенности применения при организации и обслуживании воздушного движения. 4 Назначение Аэродромный Многоканальный Автоматический...
Назначение
Аэродромный многоканальный автоматический УКВ радиопеленгатор повышенной точности АРП-75 предназначен для определения пеленгов воздушных судов, оборудованных УКВ радиостанциями и находящихся на связи у диспетчера управления воздушным движением.
АРП-75 включается в состав оборудования аэропортов большой и средней интенсивности воздушного движения и работает одновременно частотнонезависимо на четырех (восьми) пеленгаторных каналах с отображением информации на стрелочных индикаторах.
Предусмотрена возможность сопряжения АРП-75 с ВИКО РЛС и с индикаторами аппаратуры, предназначенной для опознавания воздушных судов.
Эксплуатационные характеристики
АРП-75 обеспечивает пеленгование воздушных судов с точностью, характеризуемой следующими ошибками:
1. максимальной инструментальной ошибкой, град........... не более ±1
2. вероятной ошибкой, град................................................... не более 1
3. Зона пеленгования по азимуту, град............................................ 360
4. Зона пеленгования по углу места, град.......................................... 38
5. Дальность пеленгования при мощности бортовой УКВ радиостанции 5 Вт и высоте полета, км
6. 1000 м............................................................................... не менее 100
7. 3000 м............................................................................... не менее 180
8. 10000 м............................................................................. не менее 300
9. Диапазон рабочих частот 118... 135,975 МГц с сеткой через 25 кГц.
10. Число одновременно пеленгуемых воздушных судов, работающих
11. на разных частотных каналах связи..................................................................... от 1 до 4(8)
12. Время излучения бортового передатчика для получения
13. пеленга с заданной точностью, с......................................................................... не менее 1
14. Технический ресурс составляет 50 000 часов (временной параметр в течение 10 лет. В это время допускаются ремонты с заменой отработавших свой срок деталей.
15. Время непрерывной работы, ч....................................................................................... ....;.............. 24
16. Условия эксплуатации:
17. температура окружающего воздуха от -50 до +50°С (для аппаратуры)
18. КДП - от 5 до +40°С;
19. относительная влажность окружающего воздуха до 98% при температуре 35°С (для антенно-мачтового устройства).
В аппаратной имеются автоматические системы обогрева и вентиляции, но нормальная работа АРП сохраняется при отключении или выходе из строя этих систем.
АРП обеспечивается местным и дистанционным включением каналов. При этом групповая аппаратура включается при включении одного канала, а отключается при отключении всех каналов. Дистанционное управление аппаратурой, установленной в аппаратной, дистанционный контроль, дистанционный выбор частоты резервных каналов, трансляция пеленгов всех каналов осуществляется по линии связи длиной до 10 км.
АРП может сопрягаться с ВИКО РЛС "Скала", ОПРЛ-4, "Экран-М2", "Экран-Д" и индикаторами аппаратуры "Знак", "Строка-Б".
Потребляемая мощность АРП, Вт:
от сети 380 В 50 Гц............................................................ не более 2000
с обогревом ................................................................... ....не более 8000
от сети 220 В 50 Гц ............................................................ не более 700
Месторасположение АРП
Выбор места установки АРП производится с целью обеспечения требуемой точности пеленгования (вероятной ошибки) 1°.
Наличие местных предметов приводится к тому, что отраженные от них (с направлений, отличающихся от истинного) изменяют амплитудуифазу полезного сигнала, что приводит к ошибкам в измерении пеленга на источник излучения.
При выборе места установки АРП необходимо учитывать требования по обеспечению электромагнитной современности при одновременной работе АРП с другими радиотехническими средствами: УКВ радиостанциями, курсовыми радиомаяками и бортовыми УКВ передатчиками при посадке воздушных судов.
Задачи по обеспечению электромагнитной совместимости на местах эксплуатации АРП решаются путем маневрирования в определенных пределах частотными и пространственными ресурсами.
В аэропортах гражданской авиации принимается следующее расположение АРП:
1. в районе OPJI-Aрасстояние до OPJ1-Aпри высоте объекта 6...20 м должно быть 60 м, до ПРЛ при высоте объекта 5 м 60 м, до каменных и деревянных строений при высоте 3...5 м - 60 м;
2. в районе OPJ1-Tрасстояние до OPJ1-Tпри высоте объекта 13...15 м - 30...40 м: до УКВ радиостанций при высоте объекта 20...30 м должно быть 100 м;
3. допустимые расстояния от АРП до курсового радиомаяка для КРМ 1-й категории - 500 м, для КРМ 2-й категории - 300 м.
Допустимое расстояние от АРП до УКВ радиостанций различной мощности:
1. Мощность, Вт 6 6 6 6 10 12 12 87 250 250
2. Высота пе-
редающей ан- 6 7 8 15 8 15 32 8 8
тенны, м
3. Допустимое
расстояние, м 950 1000 1100 1400 1300 1700 2100 2100 3000 5000
4. Площадка для установки АРП должна быть ровной в радиусе 100 м (уклон не более 0,02).
5. Лес высотой 10 м и выше должен быть на расстоянии не менее 300 м.
6. Антенно-мачтовое устройство должно быть установлено от кузова ПАУ-1 на расстоянии не менее 10 м.
Принцип работы
Принцип работы радиопеленгатора заключается в приеме сигнала пеленгуемого передатчика на вращающуюся (коммутирующую) по окружности в горизонтальной плоскости антенну (симметричный полуволновой вибратор). Схематично антенна показана на рис, где R - радиус окружности, D - частота вращения.
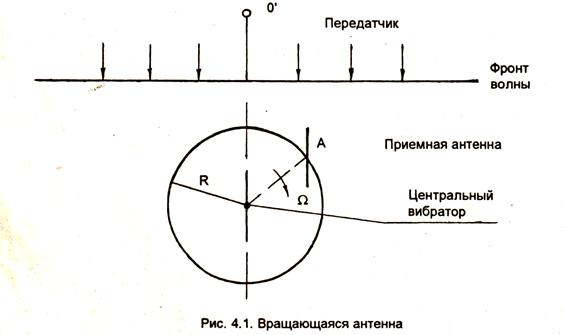
В результате вращения антенны возникает эффект Доплера и на принимаемый сигнал налагается фазовая (частотная) модуляция. Эффект Доплера состоит в том, что относительное перемещение приемника и передатчика приводит к изменению частоты (а следовательно, и фазы) принимаемого сигнала. В устройстве преобразования информации АРП происходит последовательное выделение налагаемого вращающейся антенной закона фазовой модуляции и определение начальной фазы первой гармоники этого закона, так как начальная фаза соответствует пеленгу на радиопередатчик.
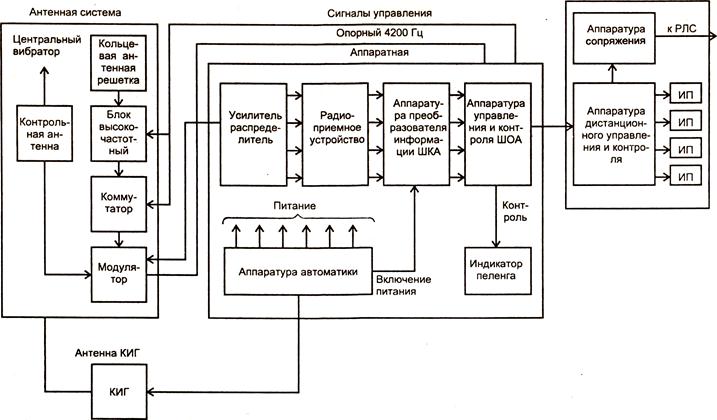
На практике вместо вращающейся антенны применяются системы расположенных по окружности неподвижных вибраторов, которые с помощью коммутатора последовательно подключаются ко входу приемника. Такой радиопеленгатор называют квазидоплеровским. Упрощенная структурная схема представлена на рис. 4.2.
Сигнал, принимаемый антенной системой, модулируется в кольцевой антенной решетке, представляющей собой 16 вертикальных симметричных вибраторов.
Вращение одного вибратора по окружности имитируется последовательным переключением 16 вибраторов с частотой переключения F = 525 Гц.
При этом частота "вращения" антенны равна Ω =F/16=32,8 Гц.
Переключение вибраторов осуществляется с помощью электронного коммутатора и выключателей, управляемых прямоугольными импульсами, которые формируются в аппаратуре управления и контроля, фазомодулированный сигнал подается на модулятор, где смешивается с опорным гармоническим колебанием стабильной частоты fоп = 4200 Гц и гармоническим сигналом, принятым центральным вибратором.
Коммутатор

|
Структурная схема АРП-75
Описание функциональной схемы:
Опорное напряжение формируется в аппаратуре управления и контроля. На выходе модулятора присутствуют два сигнала: сигнал с центрального вибратора частоты fи фазомодулированный сигнал с кольцевой антенной решетки частоты f + fоп . С выхода модулятора суммарный сигнал подается на усилитель-распределитель с помощью которого осуществляется подключение входного сигнала одновременно к радиоприемным устройствам всех каналов.
Каналы работают идентично. В радиоприемном устройстве происходит усиление и переключение сигналов, слагаемых на амплитудном детекторе. При этом выделяется фазомодулированный сигнал частоты 4200 Гц.
Дальнейшая обработка сигнала происходит в аппаратуре преобразования информации, на выходе которой формируются постоянные напряжения, пропорциональные синусу и косинусу пеленга передатчика. При появлении на входе индикатора этих напряжений его стрелка поворачивается на угол, соответствующий пеленгу.
Сигнал, принимаемый антенной системой, модулируется в кольцевой антенной решетке, представляющей собой 16 вертикальных симметричных вибраторов.
Вращение одного вибратора по окружности имитируется последовательным переключением 16 вибраторов с частотой переключения F = 525 Гц.
При этом частота "вращения" антенны равна Ω =F/16=32,8 Гц.
Переключение вибраторов осуществляется с помощью электронного коммутатора и выключателей, управляемых прямоугольными импульсами, которые формируются в аппаратуре управления и контроля, фазомодулированный сигнал подается на модулятор, где смешивается с опорным гармоническим колебанием стабильной частоты fоп = 4200 Гц и гармоническим сигналом, принятым центральным вибратором.
Опорное напряжение формируется в аппаратуре управления и контроля. На выходе модулятора присутствуют два сигнала: сигнал с центрального вибратора частоты fи фазомодулированный сигнал с кольцевой антенной решетки частоты f + fоп . С выхода модулятора суммарный сигнал подается на усилитель-распределитель с помощью которого осуществляется подключение входного сигнала одновременно к радиоприемным устройствам всех каналов.
Каналы работают идентично. В радиоприемном устройстве происходит усиление и переключение сигналов, слагаемых на амплитудном детекторе. При этом выделяется фазомодулированный сигнал частоты 4200 Гц.
Дальнейшая обработка сигнала происходит в аппаратуре преобразования информации, на выходе которой формируются постоянные напряжения, пропорциональные синусу и косинусу пеленга передатчика. При появлении на входе индикатора этих напряжений его стрелка поворачивается на угол, соответствующий пеленгу.
АРП может работать в местном и дистанционном режиме. При работе в дистанционном режиме пеленгованные сигналы и сигналы управления и контроля, вырабатываемые системой управления и контроля, по линии связи длиной до 10 км передаются, на КДП. Через аппаратуру дистанционного управления и контроля шкафа КДП пеленгационные сигналы подаются на индикаторы пеленга, установленные на рабочих местах операторов и на аппаратуру сопряжения с PJ1C.
Транслируемые сигналы управления и контроля индицируются на световом табло. Для работы по настройке и проверке аппаратуры аппаратной АРП предусмотрен местный режим работы. В этом случае управление АРП осуществляется только из аппаратной, а контроль ведется с помощью индикатора пеленга, который может подключаться к любому каналу. Для проверки работоспособности АРП при отсутствии основных пеленгуемых объектов служит антенна с контрольно-испытательныл генератором (КИГ).
Функциональная схема
– Конец работы –
Эта тема принадлежит разделу:
Средства электропроводной связи. Назначение, состав, классификация, особенности применения при организации и обслуживании воздушного движения. 4
Средства электросвязи используемые при организации авиационной подвижной электросвязи Средства радиосвязи диапазонов ОВЧ и УВЧ Назначение... Авиационная фиксированная электросвязь Назначение особенности применения при... Средства электропроводной связи Назначение состав классификация особенности применения при организации и...
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Автоматический радиопеленгатор АРП-75
Что будем делать с полученным материалом:
Если этот материал оказался полезным ля Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.021 сек.
Новости и инфо для студентов