ОПРЕДЕЛЕНИЕ ПЕРЕМЕЩЕНИЙ В БАЛКАХ ПРИ ИЗГИБЕ
СОПРОТИВЛЕНИЕ МАТЕРИАЛОВ
СОКРАЩЕННЫЙ КУРС) Составитель И.К.Калько

|
| / С |

Барнаул 2006
Глава IX
ОПРЕДЕЛЕНИЕ ПЕРЕМЕЩЕНИЙ В БАЛКАХ ПРИ ИЗГИБЕ
ОБЩИЕ ЗАМЕЧАНИЯ
Вычисленные напряжения позволяют проверить прочность системы. Однако весьма" прочные балки могут оказаться непригодными к эксплуатации из-за… В настоящей главе рассмотрим только такие балки, у которых поперечное сечение имеет ось симметрии, а все силы,…ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ОСИ ИЗОГНУТОГО БРУСА
1 VI Формула (9.3) показывает, что кривизна изменяется по длине , ' М _Г,- = const.
Р LJ
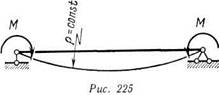
Отсюда следует, что радиус кривизны — также величина постоянная. Таким образом, при чистом изгибе балка изгибается но окружности. Однако в общем случае непосредственно применять закон изменения кривизны для определения прогибов не удается. Для аналитического решения задачи используют известное из математического анализа выражение кривизны

Подставляя значение кривизны в равенство (9.3), получим диф-гренциальное уравнение оси изогнутого бруса
d2v
± **______ s« (9 4)
Интегрирование этого нелинейного дифференциального уравнения

|
связано с большими трудностями. Учитывая, что на практике приходится иметь дело с малыми прогибами и что тангенсы углов наклона
dv „ ,
-г касательной к оси будут малы, квадратом первой производной
ldv-в знаменателе {-, по сравнению
с единицей можно пренебречь*.
згда получим приближенное дифференциальное уравнение
Два знака в уравнении (9.5) поставлены потому, что знак кривизны «к -г? может не совпадать со знаком изгибающего момента. Знак швизны зависит от направления осей координат. Знак изгибающего
 * Для рассмотренного в § 74 примера изгиба консольной балки по окружности шсимость между прогибом и углом поворота сечения конца консоли устанав-вается выражением (а), откуда следует
* Для рассмотренного в § 74 примера изгиба консольной балки по окружности шсимость между прогибом и углом поворота сечения конца консоли устанав-вается выражением (а), откуда следует
W.v 2v
(же при сравнительно невысоких требованиях, предъявляемых к жесткости балок ждуэтажных перекрытий, должно быть
V . 1
/ " 200■
'АЛ
мдрат тангенса угла попорота сечения а = I - j ч имеет порядок
^доватслыю, данной величиной по сравнению с единицей можно пренебречь.

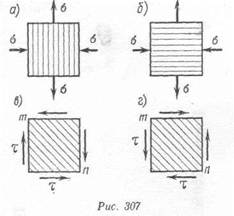
 момента был выбран в зависимостн от того, где расположены растяну тые волокна. Так, например, для случая, когда ось Оу направлен, вверх, положительному моменту (рис. 226, а) соответствует положи тельная кривизна, а отрицательному — отрицательная кривизна.
момента был выбран в зависимостн от того, где расположены растяну тые волокна. Так, например, для случая, когда ось Оу направлен, вверх, положительному моменту (рис. 226, а) соответствует положи тельная кривизна, а отрицательному — отрицательная кривизна.
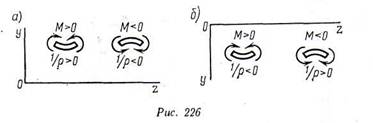
Таким образом, в случае, когда ось Оу направлена вверх, знаки кривизны и изгибающего момента совпадают, поэтому в дифференциальном уравнении берется знак плюс:
diP _ .1, м dz* r EJ'
■ Если ось Оу направлена вниз, то знаки у кривизны и изгибающего
момента различны (рис. 226, б), поэтому в правой части уравнения (9.5) берется знак минус:
cPv _ М
dz* ~ ~ £■/•
ИНТЕГРИРОВАНИЕ ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ И ОПРЕДЕЛЕНИЕ ПОСТОЯННЫХ
|
Для того чтобы получить аналитическое выражение прогибов и углов поворота, необходимо найти решение дифференциального уравнения (9.5).
Правая часть уравнения (9.5) является известной функцией от г, поэтому имеем простое дифференциальное уравнение. Интегрируя его первый раз, получим
Do , С М , ■. п , .
Это выражение определяет закон изменения углов поворота касательной по длине балки. После повторного интегрирования находим уравнение оси изогнутого бруса: и = ± JJjg clzdz + Czi D. (б)Г - '''I
<- - 24 •
Найденные значения постоянных подставим в уравнения (д) и (с) и получим уравнения прогибов и углов поворота:
EJm - EJ - - -ql- - ql г2 4- -^- ■
£jy-t.J dz- 24 4 2 -г g ,
F h) - ql3 z ql zs 4- q-
Давая теперь абсциссе г определенные значения, получим численные величины прогибов и углов поворота в определенных сечениях палки. Таким образом, можно вычислить прогиб и поворот сечения I! середине пролета, в четверти пролета и т. п.
Если в точке, где прогиб наибольший, функция прогибов имеет максимум, то для нахождения этой точки необходимо приравнять нулю первую производную от и, т. е. выражение для угла поворота. 15 данной задаче наибольший прогиб определяют из условия симметрии. Он находится посередине пролета. Положив г — 1/2, получим
5 ql* t'max - з84 EJ"•
Если на различных участках балки момент (или жесткость) имеет >азные законы изменения, то необходимо составить несколько диффе-
ii'lllMiankHUY VnaRHPUNM lp5W.
|
те' из которых отвечает свое-
iy участку. В соответствии с ним число произвольных по-.тоянных равно удвоенному числу участков интегрирования. Для определения постоянных всегда можно установить условия на границах каждого участка (граничные итювия). Так, например, из
i/ловий непрерывности и гладкости осп изогнутого бруса вытекает, что на левом конце какого-либо участка прогиб и угол попорота будут такими же, как на правом конце предшествующего участка.
Граничные условия приведут к системе уравнений, число которых соответствует числу постоянных. Совместное решение уравнений позволит найти постоянные и получить для каждого участка уравнение прогибов и углов поворота. Однако необходимость решения совместных уравнений очень сильно усложняет задачу, поэтому непосредственное интегрирование применяют только в тех случаях, когда число участков невелико (однн-два).
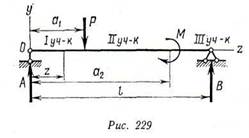
Рассмотрим балку, показанную на рис. 229. В данном случае имеем три участка, для которых изгибающие моменты равны:
Mi — Az, ОйСг^йь Ми — Az — р (z — a-i), a^-^z^a.,;
Мп1 = Лг —P(z-a1) + Af, aa«£z==s/.
]
Дифференциальные уравнения имеют вид: для первого участка
d-Vi Аг Ч& "г EJ ' для второго участка
<Pvu _Az-P(z-ai)
dz1 EJ '
для третьего участка
(&>Ш _ Аг-Р(г-а1) + М
йг- EJ
Интегралы этих уравнений: для первого участка
•для второго участка
_А& Р(г-а^ ,r r
для третьего участка
Az3 P tz о )■' Mz-
yilI==bZf7" ы-j ' +2£Т + С'52 + С'6-
Для определения шести произвольных постоянных имеется шесть граничных условии: при г = 0 v (0) = 0; при г = щ прогибы и углы поворота для двух прилегающих участков одинаковы:
[Vl~Vu]z=ai, йщ __ dvu' _dz dzz = a,'
при z = аг также имеют место равенства
[ОП = fill]* = o,i
I — и — ЁЕш]
ПрИ 2 = /
«111 (0 = 0.
Выполняя эти условия, получив шесть уравнений с шестью нешЯ вестными, которые необходимо совместно решить. Задача сильно усложняется, поэтому не будем доводить ее до конца.
В данном случае преследовалась цель показать методику и выяснить трудности, возникающие при решении задач, в которых балка ■агружена произвольной нагрузкой.
Для решения таких задач применяют другие методы, которые полагаются ниже.
МЕТОД НАЧАЛЬНЫХ ПАРАМЕТРОВ
• тому методу прогиб в лю- г'юм сечении балки опреде- 1яется через перемещения н силовые факторы, взятые и начале координат с… Представим себе, чтоЗ - ei • а
М — функция,выражающая значение изгибающего момента в произвольном сечении первого участка. Разложимфункцию прогиба щ в ряд… у, = vi (0) + v (0) 2 + в," (0) | + v{" (0) {' + .... (б)С
обращаются в нуль, поэтому получим тот же результат. Если в этой задаче положить q — О, то прогиб в балке от сосредоточенной силы б середине пролета (рис. 235, б) равен

а угол поворота на опоре


 § 80. МЕТОД МОРА ДЛЯ ОПРЕДЕЛЕНИЯ ПЕРЕМЕЩЕНИЙ
§ 80. МЕТОД МОРА ДЛЯ ОПРЕДЕЛЕНИЯ ПЕРЕМЕЩЕНИЙ
В предыдущих параграфах настоящей главы определялись перемещения в балках с прямой осью. Для брусьев с ломаной осью или' для системы, состоящей из нескольких стержней, применение описанных выше методов вызывает затруднения. Более универсальным является метод Мора, который широко применяется в теории расчета стержневых систем. Этот метод основан на известном из теоретической механики принципе возможных перемещений.
Для удобства применения этого метода условимся относительно обозначений. Перемещение какой-либо точки по определенному направлению от какой-либо силы или группысил обозначается греческой буквой А, а перемещение от силы, равной единице, — буквой б. Кроме того, каждое из перемещений обозначается двумя значками, например АКР, АК1, б„„, и т. п. Первый значок обозначает точку, для: которой определяется перемещение и вместе с'тем направление этого перемещения, а второй значок определяет причину, вызвавшую данное перемещение.
Так, например, АКР может обозначать перемещение точки К по вертикали от группы сил Р. Если в какой-либо точке приложена сила Рк по определенному направлению, то величину АА-Р можно рассматривать как перемещение по направлению силы Рк от нагрузки, обозначаемой индексом Р.
Перемещение по направлению силы Рк от температуры соответственно следует обозначать Ад-,, второй значок / показывает, чтопричиной, вызвавшей перемещение, является температура.
Под обозначением Ьтп нужно понимать перемещение по направлению воздействия т от /г-н единичной силы. Если перемещений
 берется по направлению момента, то оно представляет собой угол поворота.
берется по направлению момента, то оно представляет собой угол поворота.
Такие обозначения обладают универсальностью, их можно пони-ч.пъ в обобщенном смысле не только как линейное или угловое, но ,i как групповое перемещение, например сближение каких-либо двух
1ОЧСК И Т. П.
В теоретической механике начало возможных перемещений применяется к абсолютно жестким телам. По этому принципу в положении равновесия работа всех сил на любых бесконечно малых возможных (допускаемых связями) перемещениях равна нулю:
2РкЬКя = 0, (9Л4)
, лс ДА-Л _ составляющая возможного перемещения точки приложе-i и я силы Рк по направлению этой силы от п -го возможного перемещения системы.
|
|
 Уравнение (9.14) применяется для исследования равновесия твердых тел, в частности для определения опорных реакций.
Уравнение (9.14) применяется для исследования равновесия твердых тел, в частности для определения опорных реакций.
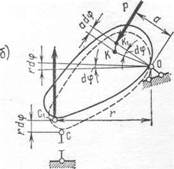
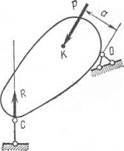
Для примера рассмотрим жесткий диск, показанный на рис. 243, а.
Поставим задачу определить опорную реакцию R. Разрежем опор-чый стержень и сообщим диску возможное бесконечно малое перемещение. При этом диск повернется вокруг точки О на бесконечно малый , гол dq>. Точка К приложения силы Р переместится в точку Къ а точка С приложения реакции R переместится в точку Сх (рис. 243, б).
Перемещения точек приложения сил Р и R по направлению их действия от этого угла поворота составят:

Составляя уравнение принципа возможных перемещений, им€

|
Знак минус перед последним членом поставлен потому, что переме щение Арф направлено в сторону, противоположную направлении действия силы Р.
Решая полученное уравнение относительно R, найдем
|
Точно такой же результат получится, если использовать обычное урав нение равновесия в виде

Рассмотрим теперь не абсолютно жесткое, а деформируемой упругое тело. Если задать точкам такого тела, находящегося; в равновесии, бесконечно малые перемещения, при которых появ-J ляются деформации, то в теле возникнут внутренние силы, которые! также произведут работу.
В этом случае уравнение принципа возможных перемещений (9.14); запишется так *:
V1 D Л _L_ Y7 _____ П /Q 1С I
Zi^KaKn-r wкп — и. w-it>;.
Здесь первое слагаемое, так же как и в уравнении (9.14), представ-; ляет собой работу внешних сил на заданных возможных перемеще-, ниях, а второе слагаемое — работу внутренних сил также на возможных перемещениях внутренних частиц тела.
Предположим, что при возможных перемещениях величина и, направление всех внешних и внутренних сил остаются неизменными, такими же, как в исходном состоянии, т. е., как обычно, ввиду малости перемещений здесь не учитывается перераспределение усилий, связанное с деформацией тела.
Следовательно, в качестве возможных можно брать и конечные, но малые перемещения, например определяемые на основе гипотез сопротивления материалов прогибы и углы поворота от какой-либо конкретной нагрузки.
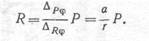
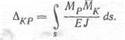
Рассмотрим ломаный брус, показанный на рис. 244, а, под дейст-s вием силы Рк = 1. В качестве возможных перемещений примем nepe-i мещения, которые произойдут вследствие деформации одного малого элемента длиной ds, расположенного в пределах, например, вертикальной стойки (рис. 244, а). Предположим, что деформация эле-* мента ds произошла от какой-либо группы сил. При обозначении* внутренних сил и перемещений от этой нагрузки будем применять индекс Р. Так, например, внутренние силы в элементе ds от этой=; группы сил будут NP, Мр и QP. Перемещение по направлению силы | Рк = 1 (рис. 244, б) обозначим dAKP. Оно равно проекции полного
I
 перемещения точки К (отрезок K7Q на направление действия силы Рк = 1.
перемещения точки К (отрезок K7Q на направление действия силы Рк = 1.
Пользуясь формулой (9.15) для рассматриваемого случая, имеем
1 • d Акр -- dW кр = О, (9.16)
Здесь dWKP — элементарная работа внутренних сил NK, ~МК и QK, вызванных силой Рк = 1 на перемещениях (Ads)P, dq>p и сдвигах уР, которые возникли вследствие деформации одного элемента ds. Эта деформация произошла от некоторой группы сил Р (на рис. 244 они не показаны). Черточка, проведенная над обозначениями NK, MK и Qk, показывает, что соответствующие значения найдены от единичной силы.
|

|
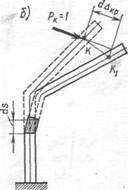
Общую деформацию элемента ds можно представить в виде трех составляющих: удлинения AdsP (рис. 245, а), угла поворота сечения difp (рис. 245, б) и сдвигов каждого из волокон уР (рис. 245, в).
Внутренние силы, возникающие в элементе ds от силы Рк = 1, являются по отношению к нему внешними силами. Нормальная сила !к и момент Мц на перемещениях (Ads)P и d<fp совершают работу, равную (рис. 245)

Касательные напряжения распределены в сечении по сложному закону. Для определения работы сил xKdF на перемещениях ypds составим интеграл-

Складывая выражения (а) и (б), получим работу сил NK и Мк и усилий, вызывающих сдвиги в элементе ds. Поскольку эти силы но отношению к элементу ds являются внешними, то работа внутренних сил будет иметь обратный знак. В силу сказанного второе сла-
гаемое, входящее в формулу (9.16), определяется равенством

|
Подставляя это выражение в (9.16) и определив dAKP, найдем

|
Вычислим вначале интеграл, входящий в формулу (9.17). Учтя,

|

|
Обозначим, как это было сделано в § 67,

|
Эта величина является безразмерной идля каждого сечения может быть вычислена по формуле (9.18).
|
|
Подстановка дает
Учитывая далее, что
(9.19)
после подстановки этих выражений и выражения (9.19) в формулу (9.17) получим

Это перемещение возникает вследствие деформацийтолько одного малого элемента ds. Для учета деформаций всей системы в целом
необходимо проинтегрировать (9.20), распространяя интегрирование на все элементы системы. Принято такой интеграл снабжать индексом «s» внизу, который символизирует учет деформации всей системы в целом. Таким образом, имеем формулу Мора

|
Необходимо иметь в виду, что входящие в формулу Мора силовые факторы берутся в произвольной точке и поэтому представляют собой аналитические функции от координат произвольных точек.
Для шарнирно-стержневых систем, в которых стержни работают только на осевую силу, в формуле Мора (9.21) отличен от нуля только первый интеграл. В этом случае нормальная сила по длине каждого стержня обычно не меняет своей величины, поэтому подынтегральное выражение как постоянная величина выйдет за знак интеграла, а сам интеграл превратится в длину стержня. Учитывая деформацию всех стержней, получим
Так как рассматриваются только плоские стержневые системы, то значки у М, N, Q и / опускаем, т. е. считается, что Мя = М, Qa = Q, /.v = / и т. п.
Остановимся теперь на технике вычисления интегралов Мора.
Заметим, что все три интеграла формулы Мора (9.21) имеют одинаковый вид, который в общем виде можно представить так:

|
Предположим, что одна из подынтегральных функций является линейной функцией, а вторая, например f(s), — произвольной. На рис. 246 показан примерный вид функций f(s) и q(s).
Из рис. 246 видно, что

Подставляя эти выражения в интеграл (9.22), получим
|
Величина интеграла численно равна статическому моменту площади Q эпюры f(s) относительно точки т (рис. 246), который в свою очередь равен площади всей эпюры, помноженной на отрезок s0,
ПОЭТОМУ

Но так как sntga = cp0, где ср0— ордината в эпюре <p(V), взятая иод центром тяжести площади Q, то

Таким образом, любой из интегралов Мора в пределах участка, на котором эти две эпюры непрерывны и одна из них линейная, равен площади криволинейной эпюры, помноженной на ординату линейной
 Функция f(s)
Функция f(s)
эпюры, взятую под центром тяжести площади Q. Эпюры от единичных сил всегда линейные, поэтому ппи наличии нескольких участков

Полученное выражение носит название формулы Верещагина, автора данной формулы.
Если обе эпюры прямолинейные, то в любой из них можно брать площадь и в другой — ординату под центром тяжести первой эпюры.
|
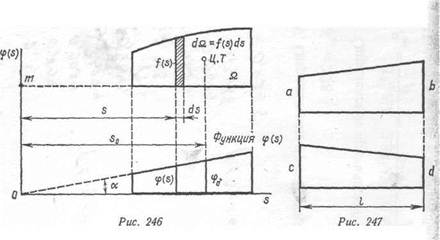
Рассмотрим частный, но вместе с тем широко распространенны случай, когда на каком-то участке обе эпюры имеют вид трапецй (рис. 247).
В этом случае

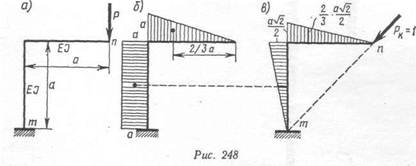
Пример 1. Определить, на сколько изменится расстояние между точками и я в результате деформации от изгиба рамы, показанной на рис. 248, а, пс
действием силы Р= Жесткости обоих стержней одинаковые и равны EJ. При определении перемещений в рамах обычно пренебрегают влиянием нормальных и поперечных сил и формулой Мора (9.21) учитывают только один интеграл, определяющий изгибные деформации:
|
Здесь Мр — моменты от заданной нагрузки. Эпюра этих моментов показана на
рис. 248,6. Эпюру Мк строим от силы, приложенной в точке п по направлению к точке т (рис. 248,в).
Пользуясь формулой Верещагина, находим

Вычисления дают

|
Глава XI СЛОЖНОЕ СОПРОТИВЛЕНИЕ


 § 88. ОБЩИЕ ПОНЯТИЯ
§ 88. ОБЩИЕ ПОНЯТИЯ
В предыдущих главах рассматривались задачи, в которых брус испытывал отдельно растяжение, сжатие, кручение или изгиб. На практике очень часто встречаются случаи, когда в результате действия нагрузки в поперечных сечениях бруса одновременно появляются несколько компонентов внутренних сил. Тогда говорят, что брус
находится в условиях с л о -
| солротивле- |
| Ж II О Г О н и я. Рассмотрим действие силы Р в точке а, приложенной к брусу, заделанному одним концом (рис. 274, а). Проведем произвольное сечение плоскостью А и разместим в нем начало осей координат Охуг. Пусть направ- |
 4)
4)
| UJ. |
Z
ляющие углы между силой Р и указанными осями координат соответственно будут а, у и р1.
Нетрудно видеть, что от силы Р в произвольном сечении возникнут все шесть компонентов внутренних сил (рис. 274, б):
нормальная сила
N = Р cos а;
поперечные силы, направленные вдоль осей Оу и Ох:
Qlt^P cosy; ч
 изгибающие моменты:
изгибающие моменты:

|

крутящий момент

Нормальная сила и изгибающие моменты вызывают в точках поперечного сечения нормальные напряжения. От поперечных сили крутящего момента возникают касательные напряжения.
Для того чтобы определить суммарные напряжения, применяют принцип независимости действия сил, по которому, как известно, необходимо определить напряжения от каждого компонента внутренних сил в отдельности, а затем их сложить *. Для применения указанного метода прежде всего условимся относительно правила знаков.
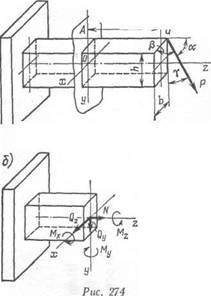
Нормальную силу, как и прежде, будем считать положительной, если она в рассматриваемом сечении вызывает растягивающие напряжения. Изгибающие моменты примем положительными, если они в точках, принадлежащих положительной четверти осей координат (совпадающих с главными осями), вызывают растягивающие напряжения.
• На рис. 275 показаны оси координат Ох и Оу и им соответствующие положительные направления моментов Мх и Му. На этом же рисунке показано положительное направление нормальной силы N. Все три указанных фактора вызывают в точках, лежащих в положительной четверти, заштрихованной на чертеже, растягивающие напряжения.
Так, при одновременном действии растяжения и изгиба в двух плоскостях нормальные напряжения в произвольной точке, лежащей в положительной четверти поперечного сечения бруса, определяют по формуле
N Мх М„
Г J д- J у
Среди случаев сложного сопротивления стержней особое место занимают наиболее часто встречающиеся сочетания отдельных простейших иидов нагружения,… Вместе с тем необходимо научиться определять внутренние сило-ные факторы для…ПОСТРОЕНИЕ ЭПЮР ВНУТРЕННИХ УСИЛИЙ ДЛЯ СТЕРЖНЯ С ЛОМАНОЙ ОСЬЮ
Расчет таких стержней начинается с определения внутренних силовых факторов в ряде сечений. Для отыскания наиболее напряженного (опасного) сечения… N, М,, Му, М„ Q.v, Qy. В первую очередь необходимо для каждого из стержней назначитьКОСОЙ ИЗГИБ
Так, например, обрешетины кровли (рис. 278) работают на косой изгиб. Вертикальная нагрузка от веса кровли и собственного веса обрешетин наклонена к… Собственный вес уголка, заделанного одним концом в стену (рис. 279), также… сечения уголка наклонены по отношению к нагрузке под некоторым углом.ОДНОВРЕМЕННОЕ ДЕЙСТВИЕ ИЗГИБА И ПРОДОЛЬНОЙ СИЛЫ
о — ~у +-j~y. (11.8) Если нагрузка вызывает моменты относительно двух главных осей инерции (рис.… N My Mu <y = +T- + -7±y + -rLx. (П.9)Gt; х J у
Если поперечное сечение стержня имеет простую форму, например прямоугольную, двутавровую и т. п., то для определения наибольшего напряжения следует… РВНЕЦЕНТРЕННОЕ ДЕЙСТВИЕ ПРОДОЛЬНОЙ СИЛЫ
Предположим, что сжимающая сила Р приложена в точке с, которая имеет координаты хР и уР, отсчитанные относительно главных центральных осей… От этой силы в произвольном сечении стержня возникают нормальная сжимающая… в соответствии с принятым правилом знаков будут отрицательными, так как они вызывают сжатие в точках, лежащих в первой…ЯДРО СЕЧЕНИЯ
бесконечности в направлении к центру тяжести сечения, оставаясь все время параллельной первоначальному своему положению. Наступит такой момент, когда нулевая линия в какой-либо точке коснется… две части: сжатую и растянутую. Таким образом, точка 1 является граничной точкой, за пределы которой нельзя перемещать…ОДНОВРЕМЕННОЕ ДЕЙСТВИЕ КРУЧЕНИЯ С ИЗГИБОМ
вал имеет круглое сечение, у которого, как известно, все оси являются главными осями. В этом случае два изгибающих момента можно геометрически… Если определить суммарный момент в целом ряде точек и построить эпюру М„ для… Определив в расчетном сечении М„ и Мкр, можно установить, чтоГлава XII ТЕОРИИ ПРОЧНОСТИ
ОСНОВНЫЕ ПОЛОЖЕНИЯ
В гл. III было установлено, что напряженное состояние в какой-чнбо точке тела полностью определяется одним главным напряжением при линейном… При возрастании действующей нагрузки главные напряжения будут соответствующим… Для пластичного материала за предельное принимается такое напряженное состояние, при котором начинают развиваться…ЭНЕРГЕТИЧЕСКАЯ ТЕОРИЯ ПРОЧНОСТИ
При построении данной теории первоначально была предложена гипотеза, согласно которой за причину наступления предельного напряженного состояния… Условие, отвечающее такой гипотезе, записывается в следующем виде: U<U0, (12.11)О + О2 /О —О 2
Для частного случая при оу = 0, положив az — а и хгу = т, имеем VW. (12.20) Энергетическая теория, так же как и третья, хорошо подтверждается в опытах с пластичными материалами и широко…ТЕОРИЯ ПРОЧНОСТИ МОРА
В теории Мора в отличие от изложенных теорий не рассматриваются отдельные гипотезы, а на основе экспериментальных данных устанавливается… (рис. 302). Однако здесь на основе имеющихся опытов не учитывают влияние… В случае, когда напряжения Qfj и а3 отвечают предельному напряженному состоянию главный круг принято называтьОБЪЕДИНЕННАЯ ТЕОРИЯ ПРОЧНОСТИ
* Идея этой теории была высказана в 1936 г. проф. Н. Н. Давиденкоеым и в дальнейшем развита Я. Б. Фридманом. Напряжение, при котором происходит отрыв, обозначим аотр, а напряжение,… Примером хрупкого разрушения может служить разрушение чугунного стержня при кручении, характерное отрывом,…ПОНЯТИЕ 0 НОВЫХ ТЕОРИЯХ ПРОЧНОСТИ
Необходимо отметить, что помимо изложенных существует большое количество теорий, многие из которых не нашли достаточно широкого применения на… За последнее время появились новые теории, которые главным образом связаны с… При построении приведенных в предыдущих параграфах теорий составлялись условия наступления предельного напряженного….6
|
роение теории прочности для многих пластмасс осложняется тем, что их механические свойства оказываются нестабильными. По сравнению с механическими свойствами металлов свойства пластмасс в большой степени зависят от таких факторов, как время, температура и др.
Это обстоятельство заставляет обратить особое внимание на выбор необходимых величин коэффициентов запаса прочности.
В последнее время по тому же принципу, что и армированные стекловолокнами пластмассы, создаются сверхпрочные металлы, у которых волокна в виде высокопрочных металлических нитевидных монокристаллов, или так называемых усов, помещаются в мягкой металлической матрице.
Такие материалы, обладая резко выраженными свойствами анизотропии, требуют разработки новых критериев прочности, учитывающих особенности их работы в условиях сложного напряженного состояния.
При построении новых теорий предельных напряженных состояний необходимо учитывать как недостатки имеющихся теорий, так и некоторые современные исследования и идеи, связанные с механизмом образования деформаций и проблемой разрушения твердых тел.
Одним из существенных недостатков имеющихся теорий является отсутствие необходимого объема экспериментальных данных, позволяющих надежно оценить достоверность той или иной теории в общем случае объемного напряженного4 состояния. Этот недостаток связан в основном с техническими трудностями постановки соответствующих опытов и поэтому в настоящее время применение существующих теорий
наиболее обосновано экспериментально лишь для плоского напряженного состояния. Однако и в этом случае многие конструкционные материалы и особенно новые еще не достаточно исследованы на опыте.
Второй, также существенный недостаток имеющихся теорий заключается в том, что при их построении материал рассматривается как сплошная однородная среда без учета его микроструктуры. Такая идеализированная модель материала оказывается удобной для построения изложенной выше методики практических расчетов при сложном напряженном состоянии. Однако выполненные в последнее время экспериментальные' и теоретические исследования показали, что микроструктура реальных твердых тел оказывает большое влияние на их деформацию и разрушение. Пренебрежение этим влиянием неизбежно отражается на результатах расчета по той или иной теории прочности. Вместе с тем учет указанного влияния представляет весьма трудную задачу, решение которой должно было бы обеспечить практическую возможность не только качественной, но и количественной оценки таких явлений, как пластическое деформирование, деформационное упрочнение и разрушение того или иного материала, работающего в условиях любого сложного напряженного состояния.
По пути к решению такой задачи на сегодняшний день пройдены хотя и важные по своему значению, но лишь первые шаги.
К недостаткам имеющихся теорий следует отнести и то, что соответствующими критериями наступления предельного напряженного состояния материала не учитывается влияние таких факторов, как температура, время, а также масштабный фактор, устанавливающий зависимость величины используемых механических характеристик (предела текучести, предела прочности) от размеров рассчитываемого элемента конструкции.
Указанные выше основные недостатки имеющихся теорий ограничивают область их применения и во всех случаях делают необходимым учет приближенности получаемых с их помощью результатов, а также наличия экспериментальных данных, в достаточной степени подтверждающих ту или иную теорию. Одновременно следует отметить, что задача построения новых, а также усовершенствования имеющихся теорий прочности является на сегодняшний день весьма актуальной.
Глава XIII
ОСНОВЫ РАСЧЕТА ТОНКОСТЕННЫХ СТЕРЖНЕЙ ОТКРЫТОГО ПРОФИЛЯ
ОСНОВНЫЕ ПОНЯТИЯ
Рис. 308СВОБОДНОЕ КРУЧЕНИЕ ТОНКОСТЕННЫХ СТЕРЖНЕЙ
Так, на рис. 310, а, б показан стержень, нагруженный на концах моментами и работающий в условиях свободного кручения. В таком стержне расстояние… лежащими на любой образующей, до и после деформации остается неизменным. Отсюда вытекает, что на любом участке стержня все продольные волокна сохраняют свою первоначальную длину, их…Т - М" А /пи
d В формулах (13.1) и (13.2) обозначены: Мо — момент чистого кручения; б —… J d — геометрическая характеристика сечения, выполняющая ту же роль, что и полярный момент инерции для стержней с…Глава XIV РАСЧЕТ КРИВОГО БРУСА
ОБЩИЕ ЗАМЕЧАНИЯ
показаны примеры кривых брусьев: крюк подъемного крана, замкнутое кольцо,… В дальнейшем ограничимся рассмотрением таких плоских кривых брусьев, которые имеют симметричные поперечные сечения,…РАСТЯЖЕНИЕ И СЖАТИЕ КРИВОГО БРУСА
В условиях центрального растяжения (сжатия) работает круговой стержень под дейст- вием равномерной радиальной нагрузки и продольных сил, приложенных на торце (рис. 342).ЧИСТЫЙ ИЗГИБ КРИВОГО БРУСА
На рис. 344, а, б показан элемент бруса длиной ds с симметричным поперечным сечением. Ось Ох направим по нейтральной оси, вокруг которой… Эпюра абсолютных удлинений волокон показана на рис. 344, в, а эпюра… Абсолютное удлинение на высоте сечения изменяется по закону прямой линии, а относительное — по закону кривой линии…ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ НЕЙТРАЛЬНОЙ ОСИ В КРИВОМ БРУСЕ ПРИ ЧИСТОМ ИЗГИБЕ
При точном решении задачи необходимо исходить из условия (14.2). Для каждого типа поперечного сечения получится свое…НАПРЯЖЕНИЕ ПРИ ОДНОВРЕМЕННОМ ДЕЙСТВИИ ПРОДОЛЬНОЙ СИЛЫ И ИЗГИБАЮЩЕГО МОМЕНТА
В этой формуле величина изгибающего момента должна быть . найдена относительно оси, проходящей через центр тяжести сечения,Т F *? "л 99 R f Q ft " Ч
Интересно сравнить полученные результаты с теми, которые будут определены по обычным формулам для прямого бруса. Момент инерции сечения… Эти цифры убедительно показывают, что для расчета кривых брусьев, вообще говоря, нельзя пользоваться формулами,…Глава XV УСТОЙЧИВОСТЬ СЖАТЫХ СТЕРЖНЕЙ
 § 115. ОСНОВНЫЕ ПОНЯТИЯ
§ 115. ОСНОВНЫЕ ПОНЯТИЯ
В предыдущих главах рассматривались методы определения па-пряжений и деформаций при растяжен-:и, сжатии, крученияи изгибе. Были также установлены критерии прочности материала при сложном сопротивлении.
Однако во многих случаях проектирования инженерных сооружений обычных расчетов на прочность бывает недостаточно для того, чтобы получить полное представление о работе сооружения.
Выяснение того, что напряжения не превосходят расчетного сопротивления материала, не дает еще трава сделать вывод о безопасности существования сооружения.
Наряду с проблемой прочности существует проблема так называемой устойчивости сооружения или егэ элементов.
 Инженерные объекты помимо . нагрузок, учитываемых расчетом, всегда подвергаются дополнительным малым воздействиям (возмущениям), стремящимся вывести данное тело из егорасчетного состояния равновесия и.:и движения.
Инженерные объекты помимо . нагрузок, учитываемых расчетом, всегда подвергаются дополнительным малым воздействиям (возмущениям), стремящимся вывести данное тело из егорасчетного состояния равновесия и.:и движения.
Если малые возмущения вызовут ж-лые отклонения системы от расчетного (невозмущенного) состояния, то это состояние системы является устойчивым. Наоборот, если при малых возмещениях возникнут большие отклонениясистемы от расчетного состояния, то последнее является неусп. йчивым.
Наглядным примером устойчивогоили неустойчивого состояния может служить вращение обычного волчка (гироскоп). Хорошо известно, что чем больше скорость вращения волчка, тем большее сопротивление он оказывает попыткам отклонить его от вращения вокруг вертикальной оси. Таким образом, вращательноедвижение волчка при больших скоростях по отношению к малым возмущениям устойчиво. При уменьшении скорости вращения ниже некоторого значения те же малые возмущения резко изменят его состояние и вызовут беспорядочные движения. Таким образом, при малых скоростях вращения движение волчка становится неустойчивым.
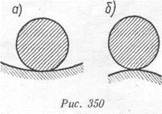
Примером устойчивого или неустойчивого равновесия является равновесие тяжелого шарика, лежащего в вогнутой или на выпуклой сфере (рис. 350). В первом случае (рис. 350, а) при любом малом отклонении шарик стремится вернуться в исходное состояние. Исходное и отклоненное состояния шарика мало отличаются друг от друга. Во втором случае (рис. 350, б) при любом малом отклонении шарик
покатится вниз. Возмущенное изаданное состояние шарика резко отличаются друг от друга.
Шарик, лежащий на дне вогнутой сферы, находится в устойчивом равновесии, а на вершине выпуклой сферы его равновесие неустойчиво.
Аналогичные явления можно наблюдать при изучении равновесия сжатого стержня. При малой сжимающей силе, меньшей некоторого критического значения Р «< Ркр, сжатый стержень нечувствителен к малым возмущениям. Незначительные дополнительные воздействия мало отклоняют стержень от его прямолинейного состояния. При Р > Ркр прямолинейная форма сжатого стержня неустойчива. Сколь угодно малые случайные воздействия вызовут большие отклонения. Стержень после устранения возмущений останется в изогнутом состоянии под действием продольной силы. Такое состояние называют продольным изгибом.
Появление продольного изгиба опасно тем, что при нем происходит очень сильное нарастание прогибов при малом нарастании сжимающей силы. Прогибы и нагрузка связаны междусобой нелинейной зависимостью. Быстрое нарастание прогибов вызывает быстрое нарастание напряжений от изгиба, которые в свою очередь приводят к ускорению деформаций и часто к разрушению стержня.
Для тонких (гибких) стержней потеря устойчивости часто наступает при сравнительно небольших сжимающих напряжениях, не являющихся опасными с точки зрения прочности самого материала.
История развития строительного искусства знает немало случаев крушения инженерных сооружений из-за неправильного их расчета на устойчивость. Так, например, в 1907 г. обрушилсябольшой мост консольной системы с главным пролетом 549 м через реку Св. Лаврентия в США. Разрушение произошло во время строительства за 15 мин до конца рабочего дня, при этом все находившиеся на мосту рабочие итехники погибли (всего погибло 74 человека); 9 тыс. т металлических конструкций пришло в полную негодность. Большая часть конструкций затонула в воде, погрузившись в отдельных местах на глубину более 40 м.
Это грандиозное крушение Квебекского моста (мост строился в 14 км от Квебека) весьма поучительно. Причиной катастрофы явился неправильный расчет сжатого составного стержня на устойчивость.
В то время теория расчета таких стержней не была в достаточной степени разработана, что является извиняющим обстоятельством для проектировщиков.
Интересно отметить, что спустя 9 лет, когда в 191G г. завершились работы по возведению нового Квебекского моста на том же месте и по той же схеме, произошло вторичное крушение, при котором упал в воду и затонул подвесной пролет.
Другой трагический случай, который может служить предметным уроком, доказывающим необходимость и важность тщательного расчета сжатых элементов на устойчивость, произошел смостом у деревни Менхенштейн в Швейцариив мае 1891 г. В момент катастрофы по мосту проходил пассажирский поезд, состоявший из 12 вагонов. Мост
имел небольшую длину — всего 42 м. Паровоз успел пройти через мост, но упавшие вагоны увлекли его за собой. Из 12 вагонов упало 6; падавшие друг на друга вагоны разбивались и образовывали груду обломков. При катастрофе погибло 74 и было ранено около 200 человек. Причина катастрофы заключалась в том, что один из сжатых рас-

|
| р>р„, |
косов фермы потерял устойчивость и повлек за собой разрушение всего моста.
Таким образом, продольный изгиб является опасным, его допускать нельзя. Поперечные сечения сжатых стержней должны назначаться не из условий прочности от чистого сжатия, а из условий того, чтобы сжимающие напряжения были меньше критических напряжений:
p V
Определение критических сил, изучение форм потери устойчивости, разработка метода подбора сечений составляют основную задачу науки об устойчивости сооружений.
На рис. 351 показаны случаи потери устойчивости различных упругих систем. В сжатом стержне (рис. 351, о) при превышении силой критического значения может произойти выпучивание. Сжи-
мающая сила вызывает, кроме сжатия, также изгибающие моменты. Кольцо (рис. 351, б) под гидростатическим давлением во всех сечениях испытывает центральное сжатие. Однако при некотором значении давления q> qHV круговое очертание кольца перестает быть устойчивым. Кольцо изгибается н превращается в эллипс.
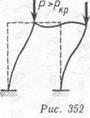
На рис. 352 показана рама, на которую действуют силы, приложенные в узлах. Эти силы вызывают центральное сжатие в стойках.
Как только силы Р превысят критическое значение, рама мгновенно изогнется, узлы ее переместятся в сторону, произойдет потеря устойчивости первоначально заданного равновесия рамы. Такая же картина происходит с аркой (рис. 353).
Все изображенные на рис. 351—353 случаи характерны тем, что до потери устойчивости во всех сечениях наблюдалось только центральное сжатие. В момент потери устойчивости к центральному сжатию присоединяется изгиб. Система переходит из одного состояния равновесия в другое. Происходит потеря устойчивости центрального сжатия.

|
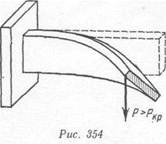
На рис. 354 показан другой случай потери устойчивости. Вначале балка испытывает изгиб в вертикальной плоскости (плоский изгиб). Как только сила превысит критическое значение, плоская форма изгиба становится неустойчивой, появляются дополнительный изгиб в горизонтальной плоскости и кручение. Аналогичным образом может произойти потеря устойчивости при кручении, внецентренном сжатии и при других видах деформации.
Если система загружена не одной, а несколькими силами или какой-либо сложной нагрузкой, то выбирается один параметр и вся система сил считается изменяющейся пропорционально этому параметру. Например, для стержня, загруженного двумя силами (рис. 355), сила Р2 выражена через Р1 (Р2 = аРу) с помощью множителя а. Таким образом, Pi принимается за параметр, с точностью до которого заданы все силы. Определив критический параметр Р1кр и зная а, можно найти всю критическую нагрузку для такого стержня.
Вопросами устойчивости занимается специальная наука — «устойчивость сооружений». В курсе сопротивления материалов обычно рассматривается только одна наиболее простая задача об устойчивости прямолинейных сжатых стержней, представляющая собой как бы введение в общую теорию устойчивости сооружений. Этим вопросам и посвящается данная глава.
МЕТОД ЭЙЛЕРА ДЛЯ ОПРЕДЕЛЕНИЯ КРИТИЧЕСКИХ СИЛ. ВЫВОД ФОРМУЛЫ ЭЙЛЕРА
Наиболее универсальным является динамический метод, основанный на изучении колебаний системы вблизи заданного положения равновесия. Однако в курсах… в инженерной практике, может быть решено более простым методом — методом… Метод Эйлера основан на анализе разветвления возможных форм равновесия упругой системы. Рассмотрим его идею более…ВЛИЯНИЕ СПОСОБОВ ЗАКРЕПЛЕНИЯ КОНЦОВ