Способы определения мгновенного центра скоростей. - раздел Философия, МЕТОДИЧЕСКИЕ УКАЗАНИЯ К ВЫПОЛНЕНИЮ КОНТРОЛЬНЫХ РАБОТ Для студентов всех форм обучения по направлениям 151000.62 «Технологические машины и оборудование» 190600.62 «Эксплуатация транспортно-технологических машин и комплексов» 1. Известны Прямые, По Которым Направлены Скорости Двух Точек Плоской Фигуры ...
1. Известны прямые, по которым направлены скорости двух точек плоской фигуры А и В (рис. 8.1). В этом случае мгновенный центр скоростей фигуры определится как точка пересечения перпендикуляров к этим прямым, восставленных в точках А и В.
2. Если скорости двух точек А и В плоской фигуры параллельны и не перпендикулярны АВ (рис. 8.2), то мгновенный центр скоростей находится в бесконечности (АР = ∞).
Рис. 8.1 Рис. 8.2 Рис. 8.3
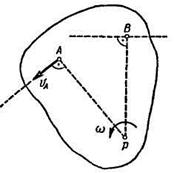
3. Если плоская фигура катится без скольжения по некоторой неподвижной поверхности (рис. 8.3), мгновенный центр скоростей находится в точке соприкасания фигуры с поверхностью.
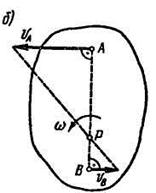
4. Если скорости точек А и В плоской фигуры параллельны между собой и перпендикулярны АВ, то для определения положения мгновенного центра скоростей должны быть известны модули скоростей обеих точек А и В (рис. 8.4, а, б). Известно, что модули скоростей точек фигуры пропорциональны их расстояниям от мгновенного центра скоростей, т. е.
Рис. 8.4
Следовательно, концы скоростей точек А и В лежат на прямой, проходящей через мгновенный центр скоростей. Пересечение этой прямой с прямой АВ определяет мгновенный центр скоростей фигуры.
Если скорости точек А и В плоской фигуры равны, параллельны между собой и перпендикулярны АВ (рис. 8.4, в), то мгновенный центр скоростей находится в бесконечности (АР = ∞), а угловая скорость фигуры
Ускорение любой точки плоской фигуры равно геометрической сумме ускорения полюса и ускорения этой точки в ее вращении вместе с плоской фигурой вокруг полюса:
,
а с учетом того, что ,
будет ,
где - ускорение полюса; - вращательное ускорение точки.
Рекомендации по решению задач
Теоретическая механика изучает общие законы механического движения и механического взаимодействия материальных тел. Традиционно курс теоретической механики состоит из трех разделов: с
Реакции связей
Наименование
связей
Условные обозначения и реакции
Примечание
Опирание
&
Решение
1. Разбиваем фигуру на простые отдельные части, положение центров тяжести которых известны.
Центр тяжести прямоугольника находится в его геометрическом центре, положение центра тяжести др
А. Теорема о движении центра масс
Задачи первого типа (определение реакций связей) рекомендуется решать в следующем порядке:
1. Построить расчетную схему задачи:
изобразить схему рассматриваемой механическ
Б. Теорема об изменении количества движения
Задачи первого типа (определение реакций связей) рекомендуется решать в следующем порядке:
1. Построить расчетную схему задачи:
изобразить схему рассматриваемой механическ
Решение.
Задаем систему координат. Проекции на горизонтальную ось всех внешних сил (сил тяжести GA, GB, GC, GD, реакции опоры N), действующих на си
Рекомендации по решению задач
При движении механической системы в каждый момент времени сумма элементарных работ активных сил и сил инерции на любом возможном перемещении системы равна нулю, т.е.







 ,
, ,
, ,
, - ускорение полюса;
- ускорение полюса;  - вращательное ускорение точки.
- вращательное ускорение точки.





Новости и инфо для студентов