рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Механика
- /
- Недоказанная и неопровергнутая гипотеза называется открытой проблемой
Реферат Курсовая Конспект
Недоказанная и неопровергнутая гипотеза называется открытой проблемой
Недоказанная и неопровергнутая гипотеза называется открытой проблемой - раздел Механика, Физика — Это Наука О Природе В Самом Общем Смысле (Часть Природоведения). Она...
Физика — это наука о природе в самом общем смысле (часть природоведения). Она изучает материю (вещество и поля) и наиболее простые и вместе с тем наиболее общие формы её движения, а также фундаментальные взаимодействия природы, управляющие движением материи. Некоторые закономерности являются общими для всех материальных систем, например, сохранение энергии, — их называют физическими законами. Физику иногда называют «фундаментальной наукой», поскольку другие естественные науки (биология, геология, химия и др.) описывают только некоторый класс материальных систем, подчиняющихся законам физики. Например, химия изучает атомы, образованные из них вещества и превращения одного вещества в другое. Химические же свойства вещества однозначно определяются физическими свойствами атомов и молекул, описываемыми в таких разделах физики, как термодинамика, электромагнетизм и квантовая физика.
Физика тесно связана с математикой: математика предоставляет аппарат, с помощью которого физические законы могут быть точно сформулированы. Физические теории почти всегда формулируются в виде математических выражений, причём используются более сложные разделы математики, чем обычно в других науках. И наоборот, развитие многих областей математики стимулировалось потребностями физических теорий
Тео́рия (греч. θεωρία, «рассмотрение, исследование») — система знаний, обладающая предсказательной силой в отношении какого-либо явления. Теории формулируются, разрабатываются и проверяются в соответствии с научным методом.
Стандартный метод проверки теорий — прямая экспериментальная проверка («эксперимент — критерий истины»). Однако часто теорию нельзя проверить прямым экспериментом (например, теорию о возникновении жизни на Земле), либо такая проверка слишком сложна или затратна (макроэкономические и социальные теории), и поэтому теории часто проверяются не прямым экспериментом, а по наличию предсказательной силы — то есть если из неё следуют неизвестные/незамеченные ранее события, и при пристальном наблюдении эти события обнаруживаются, то предсказательная сила присутствует.
гипо́теза (от др.-греч. ὑπόθεσις — «основание», «предположение») — недоказанное утверждение, предположение или догадка.
Как правило, гипотеза высказывается на основе ряда подтверждающих её наблюдений (примеров) и поэтому выглядит правдоподобно. Гипотезу впоследствии или доказывают, превращая её в установленный факт (см. теорема, теория), или же опровергают (например, указывая контрпример), переводя в разряд ложных утверждений.
Недоказанная и неопровергнутая гипотеза называется открытой проблемой.
Эксперимент (от лат. experimentum — проба, опыт) в научном методе — набор действий и наблюдений, выполняемых для проверки (истинности или ложности) гипотезы или научного исследования причинных связей между феноменами. Эксперимент является краеугольным камнем эмпирического подхода к знанию. Критерий Поппера выдвигает в качестве главного отличия научной теории от псевдонаучной возможность постановки эксперимента, прежде всего такого, который может дать опровергающий эту теорию результат.
Эксперимент делится на следующие этапы:
-Сбор информации;
-Наблюдение явления;
-Анализ;
· Выработка гипотезы, чтобы объяснить явление;
· Разработка теории, объясняющей феномен, основанный на предположениях, в более широком плане.
опыт - Воспроизведение какого-нибудь явления (чаще физического) в искусственно созданных условиях с целью его исследования; то же, что эксперимент. Умозрение сочетается с наблюдением и опытом. Физические опыты. Производить опыты с чем-нибудь или над чем-нибудь.
Физическая модель представляет собой аналоговую модель, в которой между параметрами объекта и модели одинаковой физической природы существует однозначное соответствие. В этом случае элементом системы ставятся в соответствие физические эквиваленты, воспроизводящие структуру, основные свойства и соотношения изучаемого объекта. При физическом моделировании, основой которого является теория подобия, сохраняются особенности проведения эксперимента в натуре с соблюдением оптимального диапазона изменения соответствующих физических параметров.
Простейшей физической моделью в классической механике является материальная точка.
Меха́ника (греч. μηχανική — искусство построения машин) — область физики, изучающая движение материальных объектов и взаимодействие между ними. Важнейшими разделами механики являются классическая механика и квантовая механика.
Стандартные («школьные») разделы механики: кинематика, статика, динамика, законы сохранения. Кроме них, механика включает следующие (во многом перекрывающиеся) разделы:
-классическая механика
-теоретическая механика
-нелинейная динамика
-релятивистская механика
-квантовая механика
-небесная механика
-неголономная механика
-теория колебаний
-теория устойчивости и катастроф
-механика сплошных сред
-теория упругости
-теория пластичности
-наследственная механика
-статистическая механика
-вычислительная механика
-сопротивление материалов
-строительная механика
Классическая механика — вид механики (раздела физики, изучающей законы изменения положений тел в пространстве со временем и причины, это вызывающие), основанный на законах Ньютона и принципе относительности Галилея. Поэтому её часто называют «Ньютоновской механикой».
Классическая механика подразделяется на:
· статику (которая рассматривает равновесие тел)
· кинематику (которая изучает геометрическое свойство движения без рассмотрения его причин)
· динамику (которая рассматривает движение тел).
Существует несколько эквивалентных способов формального математического описания классической механики:
-Законы Ньютона
-Лагранжев формализм
-Гамильтонов формализм
-Формализм Гамильтона — Якоби
Классическая механика даёт очень точные результаты в рамках повседневного опыта. Однако её применение ограничено телами, скорости которых много меньше скорости света, а размеры значительно превышают размеры атомов и молекул. Обобщением классической механики на тела, двигающиеся с произвольной скоростью, является релятивистская механика, а на тела, размеры которых сравнимы с атомными — квантовая механика. Квантовая теория поля рассматривает квантовые релятивистские эффекты.
Ква́нтовая меха́ника — раздел теоретической физики, описывающий квантовые системы и законы их движения.
Классическая механика, хорошо описывающая системы макроскопических масштабов, не способна описать явления на уровне атомов, электронов и фотонов. Квантовая механика способна описывать поведение электронов, фотонов, а также других элементарных частиц. Эксперименты подтверждают результаты, полученные с помощью квантовой механики.
Основными понятиями квантовой кинематики являются понятия наблюдаемой и состояния.
Основные уравнения квантовой динамики — уравнение Шрёдингера, уравнение фон Неймана, уравнение Линдблада, уравнение Гейзенберга, и уравнение Паули
Уравнения квантовой механики тесно связаны со многими разделами математики, среди которых: теория операторов, теория вероятностей, функциональный анализ, операторные алгебры, теория групп.
Релятивистская механика — раздел физики, рассматривающий законы механики (законы движения тел и частиц) при скоростях, сравнимых со скоростью света. При скоростях значительно меньших скорости света переходит в классическую (ньютоновскую) механику.
Основные законы релятивистской механики — релятивистское обобщение второго закона Ньютона и релятивистский закон сохранения энергии-импульса являются следствием такого «смешения» пространственных и временной координат при преобразованиях Лоренца.
Классическая механика Ньютона прекрасно описывает движение макротел, движущихся с малыми скоростями (υ << c). В нерелятивистской физике принималось как очевидный факт существование единого мирового времени t, одинакового во всех системах отсчета.
Механи́ческим движе́нием тела называется изменение его положения в пространстве относительно других тел с течением времени. При этом тела взаимодействуют по законам механики.
Раздел механики, описывающий геометрические свойства движения без учёта причин, его вызывающих, называется кинематикой.
В более общем значении движением называется изменение состояния физической системы с течением времени. Например, можно говорить о движении волны в среде.
еханическое движение можно рассматривать для разных механических объектов:
· Движение материальной точки полностью определяется изменением её координат во времени (например, двух на плоскости). Изучением этого занимается кинематика точки. В частности, важными характеристиками движения являются траектория материальной точки, перемещение, скорость и ускорение.
o Прямолинейное движение точки (когда она всегда находится на прямой, скорость параллельна этой прямой)
o Криволинейное движение - это движение точки по траектории, не представляющей собою прямую, с произвольным ускорением и произвольной скоростью в любой момент времени (например, движение по окружности).
· Движение твёрдого тела складывается из движения какой-либо его точки (например, центра масс) и вращательного движения вокруг этой точки. Изучается кинематикой твёрдого тела.
o Если вращение отсутствует, то движение называется поступательным и полностью определяется движением выбранной точки. Заметим, что при этом оно не обязательно является прямолинейным.
o Для описания вращательного движения — движения тела относительно выбранной точки, например закреплённого в точке, используют Углы Эйлера. Их количество в случае трёхмерного пространства равно трём.
o Также для твёрдого тела выделяют плоское движение — движение, при котором траектории всех точек лежат в параллельных плоскостях, при этом оно полностью определяется одним из сечений тела, а сечение тела положением любых двух точек.
· Движение сплошной среды. Здесь предполагается, что движение отдельных частиц среды довольно независимо друг от друга (обычно ограничено лишь условиями непрерывности полей скорости), поэтому число определяющих координат бесконечно (неизвестными становятся функции).
Материа́льная то́чка — простейшая физическая модель в механике — абстрактное тело нулевых размеров[1]. Практически под материальной точкой понимают обладающее массой тело, размерами и формой которого в конкретной ситуации можно пренебречь.
система материальных точек- совокупность материальных точек или материальных тел, объединяемых общими законами взаимодействия (положение или движение каждой из точек зависит от положения или движения всех остальных)
Абсолю́тно твёрдое те́ло — второй опорный объект механики наряду с материальной точкой.
Существует несколько определений:
1. Абсолютно твердое тело — модельное понятие классической механики, обозначающее совокупность материальных точек, расстояния между которыми сохраняются в процессе любых движений, совершаемых этим телом. Иначе говоря, абсолютно твердое тело не только не изменяет свою форму, но и сохраняет неизменным распределение массы внутри.
2. Абсолютно твердое тело — механическая система, обладающая только поступательными и вращательными степенями свободы. «Твёрдость» означает, что тело не может быть деформировано, то есть телу нельзя передать никакой другой энергии, кроме кинетической энергии поступательного или вращательного движения.
3. Абсолютно твёрдое тело — тело (система), взаимное положение любых точек которого не изменяется, в каких бы процессах оно ни участвовало.
В трёхмерном пространстве и в случае отсутствия связей абсолютно твёрдое тело обладает 6 степенями свободы: три поступательных и три вращательных. Исключение составляет двухатомная молекула или, на языке классической механики, твёрдый стержень нулевой толщины. Такая система имеет только две вращательных степени свободы.
Сплошна́я среда́ — механическая система, обладающая бесконечным числом внутренних степеней свободы. Её движение в пространстве, в отличие от других механических систем, описывается не координатами и скоростями отдельных частиц, а скалярным полем плотности и векторным полем скоростей. В зависимости от задач, к этим полям могут добавляться поля других физических величин (концентрация, температура, поляризованность и др.)
Если плотность сплошной среды постулируется равной константе, то такая сплошная среда называется несжимаемой.
Сплошная среда — часто и успешно используемая в физике сплошных сред модель для более-менее однородных систем с очень большим числом частиц (то есть степеней свободы). Так, теория упругости, гидро- и аэродинамика, физика плазмы формулируются именно для сплошной среды. Однако с точки зрения математической строгости следует помнить об одной неточности: все реальные системы обладают пусть большим, но конечным числом степеней свободы. Сплошная же среда обладает не просто бесконечным, а несчётным числом степеней свободы.
В классической физике понятие “состояние” отражает доминирующий в определенном отношении способ существования физических объектов (систем), характеризующийся мгновенным значением всех (взаимосвязанных и равноценных) динамических переменных, проявляющихся в данном отношении. Фундаментальный статус понятия “состояние” в физике определяется тем, что физическая теория описывает процессы в виде связи состояний. Математический формализм, различные уравнения и зависимости, содержащиеся во всех физических теориях, есть не что иное, как уравнение состояний определенных процессов изменения.
Принцип относительности в механике
Преобразования Галилея. Инварианты преобразования. Абсолютные и относительные скорости и ускорения. Постулаты специальной теории относительности. Преобразование Лоренца. Следствия из преобразованияСкалярная величина
Скалярная величина (скаляр) – это физическая величина, которая имеет только одну характеристику – численное значение.
Скалярная величина может быть положительной или отрицательной.
Примеры скалярных величин: масса (m), температура (t0), путь (S), работа (А), время (t) и т.д.
Математические действия со скалярными величинами – это алгебраические действия.
Векторная величина
Примеры векторных величин: скорость (), сила (), ускорение () и т.д. Геометрически вектор изображается как направленный отрезок прямой линии, длина… Ра́диус-ве́ктор (обычно обозначается или просто ) — вектор, задающий положения точки в пространстве…Вращательное движение материальной точки.
Враща́тельное движе́ние — вид механического движения. При… Угловой скоростью называется векторная величина, равная первой производной угла поворота тела по времени:Связь между векторами линейной и угловой скоростей, линейного и углового ускорений.
Равномерное вращательное движение: за любые равные промежутки времени тело… Средняя угловая скорость тела равна отношению угла поворота к промежутку времени.Скорость и ускорение при криволинейном движении.
Мгновенная скорость тела при криволинейном движении направлена в любой точке траектории по касательной к траектории в этой точке. Этот вывод о направлении мгновенной скорости можно подтвердить, наблюдая, как… При криволинейном движении направление скорости тела меняется, поэтому такое движение является неравномерным, даже…Ускорение при криволинейном движении.
Рис. 49. Изменение скорости при криволинейном движении. Таким образом, в криволинейном движении всегда имеется изменение скорости, т. е. это движение происходит с ускорением.…Уравнение движения Ньютона
— координат частицы r (колебания груза на пружине, F = –kx, движение Земли вокруг Солнца, F~ 1/r2), — скорости частицы v (сила трения: при больших скоростях ~ υ2, а при… — времени t (переменное во времени воздействие).Центр масс
, или для тела при непрерывном распределении массЗакон движения центра масс.
dP/dt = M∙dVc/dt = ΣFi Центр масс системы движется так же, как двигалась бы частица с массой, равной… В частности, центр масс замкнутой системы относительно произвольной ИСО движется равномерно прямолинейно или покоится.…Галилея принцип относительности
Инерциальная система отсчёта Галилея принцип относительности, принцип физического равноправия инерциальных… Движение материальной точки относительно: её положение, скорость, вид траектории зависят от того, по отношению к какой…Границы применимости классической механики
В настоящее время известно три типа ситуаций, в которых классическая механика перестаёт отражать реальность.
· Свойства микромира не могут быть поняты в рамках классической механики. В частности, в сочетании с термодинамикой она порождает ряд противоречий (см.Классическая механика). Адекватным языком для описания свойств атомов и субатомных частиц является квантовая механика. Подчеркнём, что переход от классической к квантовой механике — это не просто замена уравнений движения, а полная перестройка всей совокупности понятий (что такое физическая величина, наблюдаемое, процесс измерения и т. д.)
· При скоростях, близких к скорости света, классическая механика также перестаёт работать, и необходимо переходить к специальной теории относительности. Опять же, этот переход подразумевает полный пересмотр парадигмы, а не простое видоизменение уравнений движения. Если же, пренебрегая новым взглядом на реальность, попытаться всё же привести уравнение движения к виду F = ma, то придётся вводить тензор масс, компоненты которого растут с ростом скорости. Эта конструкция уже долгое время служит источником многочисленных заблуждений, поэтому пользоваться ей не рекомендуется.
· Классическая механика становится неэффективной при рассмотрении систем с очень большим числом частиц (или же большим числом степеней свободы). В этом случае практически целесообразно переходить к статистической физике.
Неинерциа́льная систе́ма отсчёта — произвольная система отсчёта, не являющаяся инерциальной. Примеры неинерциальных систем отсчета: система, движущаяся прямолинейно с постоянным ускорением, а также вращающаяся система.
При рассмотрении уравнений движения тела в неинерциальной системе отсчета необходимо учитывать дополнительные силы инерции. Законы Ньютона выполняются только в инерциальных системах отсчёта. Для того, чтобы найти уравнение движения в неинерциальной системе отсчёта, нужно знать законы преобразования сил и ускорений при переходе от инерциальной системы к любой неинерциальной.
Классическая механика постулирует следующие два принципа:
1. время абсолютно, то есть промежутки времени между любыми двумя событиями одинаковы во всех произвольно движущихся системах отсчёта;
2. пространство абсолютно, то есть расстояние между двумя любыми материальными точками одинаково во всех произвольно движущихся системах отсчёта.
Эти два принципа позволяют записывать уравнение движения материальной точки относительно любой неинерциальной системы отсчёта, в которой не выполняется Первый закон Ньютона.
Основное уравнение динамики относительного движения материальной точки имеет вид:
 ,
,
где  — масса тела,
— масса тела,  — ускорение тела относительно неинерциальной системы отсчёта,
— ускорение тела относительно неинерциальной системы отсчёта,  — сумма всех внешних сил, действующих на тело,
— сумма всех внешних сил, действующих на тело,  — переносное ускорение тела,
— переносное ускорение тела,  — кориолисово ускорение тела.
— кориолисово ускорение тела.
Это уравнение может быть записано в привычной форме Второго закона Ньютона, если ввести фиктивные силы инерции:
·  — переносная сила инерции
— переносная сила инерции
·  — сила Кориолиса
— сила Кориолиса
Инерциальная система отсчёта, система отсчёта, в которой справедлив закон инерции: материальная точка, когда на неё не действуют никакие силы (или действуют силы взаимно уравновешенные), находится в состоянии покоя или равномерного прямолинейного движения. Всякая система отсчёта, движущаяся по отношению к И. с. о. поступательно, равномерно и прямолинейно, есть также И. с. о. Следовательно, теоретически может существовать сколько угодно равноправных И. с. о., обладающих тем важным свойством, что во всех таких системах законы физики одинаковы (так называемый принцип относительности). Помимо закона инерции, в любой И. с. о. справедливы также 2-й закон Ньютона (см. Ньютона законы механики) и законы сохранения количества движения (импульса), момента количества движения и движения центра инерции (или центра масс) для замкнутых, т. е. не подверженных внешним воздействиям, систем.
Если система отсчёта движется по отношению к И. с. о. неравномерно и прямолинейно, то она является неинерциальной и ни закон инерции, ни другие названные законы в ней не выполняются. Объясняется это тем, что по отношению к неинерциальной системе отсчёта материальная точка будет иметь ускорение даже при отсутствии действующих сил вследствие ускоренного поступательного или вращательного движения самой системы отсчёта.
Понятие об И. с. о. является научной абстракцией. Реальная система отсчёта связывается всегда с каким-нибудь конкретным телом (Землёй, корпусом корабля или самолёта и т. п.), по отношению к которому и изучается движение тех или иных объектов. Поскольку в природе нет неподвижных тел (тело, неподвижное относительно Земли, будет двигаться вместе с нею ускоренно по отношению к Солнцу и звёздам и т. д.), то любая реальная система отсчёта может рассматриваться как И. с. о. лишь с той или иной степенью приближения. С очень высокой степенью точности И. с. о. можно считать так называемую гелиоцентрическую (звёздную) систему с началом в центре Солнца (точнее, в центре масс Солнечной системы) и с осями, направленными на три звезды. Такая И. с. о. используется главным образом в задачах небесной механики и космонавтики. Для решения большинства технических задач И. с. о. практически может служить система, жестко связанная с Землёй, а в случаях, требующих большей точности (например, в гироскопии), — с началом в центре Земли и осями, направленными на звёзды.
При переходе от одной И. с. о. к другой в классической механике Ньютона для пространственных координат и времени справедливы преобразования Галилея (см. Галилея принцип относительности), а в релятивистской механике (т. е. при скоростях движения, близких к скорости света) — Лоренца преобразования.
Си́ла Кориоли́са — одна из сил инерции, существующая в неинерциальной системе отсчёта из-за вращения и законов инерции, проявляющаяся при движении в направлении под углом к оси вращения. Названа по имени французского учёного Гюстава Гаспара Кориолиса, впервые её описавшего. Ускорение Кориолиса было получено Кориолисом в 1833 году, Гауссом в 1803 году и Эйлером в 1765 году.
Причина появления силы Кориолиса — в кориолисовом (поворотном) ускорении. В инерциальных системах отсчёта действует закон инерции, то есть, каждое тело стремится двигаться по прямой и с постоянной скоростью. Если рассмотреть движение тела, равномерное вдоль некоторого вращающегося радиуса и направленное от центра, то станет ясно, что чтобы оно осуществилось, требуется придавать телу ускорение, так как чем дальше от центра, тем должна быть больше касательная скорость вращения. Это значит, что с точки зрения вращающейся системы отсчёта, некая сила будет пытаться сместить тело с радиуса.
Для того, чтобы тело двигалось с кориолисовым ускорением, необходимо приложение силы к телу, равной F = ma, где a — кориолисово ускорение. Соответственно, тело действует по третьему закону Ньютона с силой противоположной направленности. FK = − ma. Сила, которая действует со стороны тела, и будет называться силой Кориолиса. Не следует путать Кориолисову силу с другой силой инерции — центробежной силой, которая направлена по радиусу вращающейся окружности.
Если вращение происходит по часовой стрелке, то двигающееся от центра вращения тело будет стремиться сойти с радиуса влево. Если вращение происходит против часовой стрелки — то вправо.
Сила Кориолиса равна:
 ,
,
где — точечная масса,  — вектор угловой скорости вращающейся системы отсчёта,
— вектор угловой скорости вращающейся системы отсчёта,  — вектор скорости движения точечной массы в этой системе отсчёта, квадратными скобками обозначена операция векторного произведения.
— вектор скорости движения точечной массы в этой системе отсчёта, квадратными скобками обозначена операция векторного произведения.
Величина  называется кориолисовым ускорением.
называется кориолисовым ускорением.
Сила инерции — фиктивная сила, которую можно ввести в неинерциальной системе отсчёта так, чтобы законы механики в ней совпадали с законами инерциальных систем.
В математических вычислениях введения этой силы происходит путём преобразования уравнения
F1+F2+…Fn = ma к виду
F1+F2+…Fn–ma = 0 Где Fn — реально действующая сила, а –ma — «сила инерции».
Закон инерции про инерционные системы отсчёта гласит, что без влияния неуравновешенных сил тело будет сохранять свою скорость или неподвижность. В качестве примера силы инерции можно рассмотреть простую силу инерции, которую можно ввести в равноускоренной системе отсчёта:
Пусть у нас есть быстро останавливающийся автобус. Все тела в нём будут нарушать закон инерции — они будут иметь тенденцию продолжать движение, и пассажирам придётся крепко держаться за поручни, чтобы не упасть вперёд, и оставаться неподвижными на своих местах относительно автобуса. Но если предположить, что всем пассажирам приходится противодействовать некой силе, то можно будет объяснить эту тенденцию её действием. Такую силу и назвали силой инерции. С введением этой силы закон инерции в автобусе восстановится — тела можно счесть подвергающимися действию этой силы, и тогда они будут вести себя в полном соответствии со вторым законом Ньютона. То есть если пассажиры приложат к себе относительно поручней дополнительную мускульную силу, противоположную силе инерции, то останутся на своих местах.
Среди сил инерции выделяют следующие:
· простую силу инерции, которую мы только что рассмотрели;
· центробежную силу, объясняющую стремление тел улететь от оси во вращающихся системах отсчёта;
· силу Кориолиса, объясняющую стремление тел сойти с радиуса при радиальном движении во вращающихся системах отсчёта;
С точки зрения общей теории относительности, гравитационные силы в любой точке — это силы инерции в данной точке искривлённого пространства Эйнштейна (см. принцип эквивалентности).
Си́ла упру́гости — сила, возникающая при деформации тела и противодействующая этой деформации.
В случае упругих деформаций является потенциальной. Сила упругости имеет электромагнитную природу, являясь макроскопическим проявлением межмолекулярного взаимодействия. Сила упругости направлена противоположно смещению, перпендикулярно поверхности.
Вектор силы противоположен направлению деформации тела (смещению его молекул).
Деформа́ция (от лат. deformatio — «искажение») — изменение взаимного положения частиц тела, связанное с их перемещением друг относительно друга. Деформация представляет собой результат изменения межатомных расстояний и перегруппировки блоков атомов. Обычно деформация сопровождается изменением величин межатомных сил, мерой которого является упругое механическое напряжение. Упругие деформации исчезают после окончания действия приложенных сил, а необратимые — остаются. В основе упругих деформаций лежат обратимые смещения атомов металлов от положения равновесия(другими словами, атомы не выходят за пределы межатомных связей).
В технике часто применяются спиралеобразныепружины (рис. 1.12.3). При растяжении или сжатии пружин возникают упругие силы, которые также подчиняются закону Гука. Коэффициент k называют жесткостью пружины. В пределах применимости закона Гука пружины способны сильно изменять свою длину. Поэтому их часто используют для измерения сил. Пружину, растяжение которой проградуировано в единицах силы, называют динамометром. Следует иметь в виду, что при растяжении или сжатии пружины в ее витках возникают сложные деформации кручения и изгиба.

|
Рисунок 1.12.3.
Деформация растяжения пружины.  
|
В отличие от пружин и некоторых эластичных материалов (резина) деформация растяжения или сжатия упругих стержней (или проволок) подчиняются линейному закону Гука в очень узких пределах. Для металлов относительная деформация ε = x / l не должна превышать 1 %. При больших деформациях возникают необратимые явления (текучесть) и разрушение материала.
При деформации тела возникает сила, которая стремится восстановить прежние размеры и форму тела. Эта сила возникает вследствие электромагнитного взаимодействия между атомами и молекулами вещества. Ее называют силой упругости.
Простейшим видом деформации являются деформации растяжения и сжатия (рис. 1.12.1).

|
Рисунок 1.12.1.
Деформация растяжения (x > 0) и сжатия (x < 0). Внешняя сила 
|
При малых деформациях (|x| << l) сила упругости пропорциональна деформации тела и направлена в сторону, противоположную направлению перемещения частиц тела при деформации:
|
Это соотношение выражает экспериментально установленный закон Гука. Коэффициент k называется жесткостью тела. В системе СИ жесткость измеряется в ньютонах на метр (Н/м). Коэффициент жесткости зависит от формы и размеров тела, а также от материала. В физике закон Гука для деформации растяжения или сжатия принято записывать в другой форме. Отношение ε = x / l называется относительной деформацией, а отношение σ = F / S = –Fупр / S, где S – площадь поперечного сечения деформированного тела, называется напряжением. Тогда закон Гука можно сформулировать так: относительная деформация ε пропорциональна напряжению σ:
|

Коэффициент E в этой формуле называется модулем Юнга. Модуль Юнга зависит только от свойств материала и не зависит от размеров и формы тела. Модуль Юнга различных материалов меняется в широких пределах. Для стали, например, E ≈ 2·1011 Н/м2, а для резины E ≈ 2·106 Н/м2, т. е. на пять порядков меньше.
Закон Гука может быть обобщен и на случай более сложных деформаций. Например, при деформации изгиба упругая сила пропорциональна прогибу стержня, концы которого лежат на двух опорах (рис. 1.12.2).
|
Рисунок 1.12.2.
Деформация изгиба. 
|
Упругую силу  действующую на тело со стороны опоры (или подвеса), называют силой реакции опоры. При соприкосновении тел сила реакции опоры направлена перпендикулярно поверхности соприкосновения. Поэтому ее часто называют силой нормального давления. Если тело лежит на горизонтальном неподвижном столе, сила реакции опоры направлена вертикально вверх и уравновешивает силу тяжести:
действующую на тело со стороны опоры (или подвеса), называют силой реакции опоры. При соприкосновении тел сила реакции опоры направлена перпендикулярно поверхности соприкосновения. Поэтому ее часто называют силой нормального давления. Если тело лежит на горизонтальном неподвижном столе, сила реакции опоры направлена вертикально вверх и уравновешивает силу тяжести:  Сила
Сила  с которой тело действует на стол, называется весом тела.
с которой тело действует на стол, называется весом тела.
Модуль Юнга (модуль упругости) — коэффициент, характеризующий сопротивление материала растяжению/сжатию при упругой деформации. Назван в честь английского физика XIX века Томаса Юнга. В динамических задачах механики модуль Юнга рассматривается в более общем смысле — как функционал среды и процесса.
Модуль Юнга рассчитывается следующим образом:
где:
· E — модуль упругости, измеряемый в паскалях
· F — сила в ньютонах,
· S — площадь поверхности, по которой распределено действие силы,
· l — длина деформируемого стержня,
· x — модуль изменения длины стержня в результате упругой деформации (измеренного в тех же единицах, что и длина l).
Через модуль Юнга вычисляется скорость распространения звука в веществе:

где ρ — плотность вещества.
Нотация Фойгта — матричная форма записи симметричного тензора 4-го ранга. Впервые была предложена немецким физиком В.Фойгтом для тензора упругости в формулировке закона Гука для анизотропных материалов.
Если тензора 4-ранга  обладают симметрией по первой и второй паре индексов
обладают симметрией по первой и второй паре индексов
 ,
,
 ,
,
то элементы этого тензора можно записать в виде матрицы 6x6, используя следующую подстановку индексов:





 .
.
Например, компонента  будет соответствовать элементу матрицы
будет соответствовать элементу матрицы  .
.
Используя те же подстановки индексов, можно записывать симметричные тензоры 2-ранга в виде 6-векторов. При таком представлении, результат умножения тензоров, вообще говоря, не соответствуют результату перемножения матриц. Для того, чтобы операция тензорного умножения могла быть записана в виде умножения матриц, может потребоваться введение дополнительных множителей.
Те́нзор деформа́ции — тензор, который характеризует сжатие (растяжение) и изменение формы в каждой точке тела при деформации.
Тензор деформации Коши-Грина в классической сплошной среде (частицы которой являются материальными точками и обладают лишь тремя трансляционными степенями свободы) определяется как
 ,
,
где  — вектор, описывающий смещение точки тела: его координаты — разность между координатами близких точек после (
— вектор, описывающий смещение точки тела: его координаты — разность между координатами близких точек после ( ) и до (dxi) деформации. Дифференцирование производится по координатам в отсчетной конфигурации (до деформирования). Расстояния до и после деформации связаны через
) и до (dxi) деформации. Дифференцирование производится по координатам в отсчетной конфигурации (до деформирования). Расстояния до и после деформации связаны через  :
:
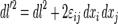 (по повторяющимся индексам ведётся суммирование).
(по повторяющимся индексам ведётся суммирование).
По определению тензор деформации симметричен, то есть  .
.
В некоторых источниках этот тензор деформации называют тензором деформации Грина-Лагранжа, а правую меру деформации Коши-Грина (удвоенный обсуждаемый тензор деформации плюс единичный тензор) - правым тензором деформации Коши-Грина.
Нелинейный тензор деформации Коши-Грина обладает свойством материальной объективности. Это означает, что если кусок деформируемого тела совершает жесткое движение, тензор деформации поворачивается вместе с элементарным объемом материала. Удобно использовать такие тензоры при записи определяющих уравнений материала, тогда принцип материальной объективности выполняется автоматически, то есть если наблюдатель двигается относительно деформируемой среды, поведение материала не меняется (тензор напряжений поворачивается в системе отсчета наблюдателя вместе с элементарным объемом материала).
Существуют также другие объективные тензоры деформации, например, тензор деформации Альманси, тензоры деформации Пиола, Фингера и т.д. В некоторые из них входят производные от перемещений по координатам в отсчетной конфигурации (до деформирования), а в некоторые - по координатам в актуальной конфигурации (после деформирования).
То, что в классической сплошной среде энергия деформации зависит лишь от симметричного тензора деформации, следует из закона баланса моментов. Любая взаимно-однозначная функция объективного тензора деформации будет также объективным тензором деформации. Например (в силу симметричности и положительной определенности тензора деформации) можно использовать квадратный корень из тензора деформации Коши-Грина. Однако, задавая определяющие уравнения при помощи этих тензоров, важно следить за предположениями о характере зависимости свободной энергии (или напряжений) от тензоров деформации. Ясно, что предположения о, скажем, дифференцируемости свободной энергии по тензору деформации Коши-Грина, по корню из него или по его квадрату приведут к уравнениям совершенно разных материалов. Линейная по теория общего вида при малых получится лишь в первом случае.
При малых можно пренебречь квадратичными слагаемыми, и пользоваться тензором деформации в виде: 
Линейный тензор деформации Коши-Грина (совпадает с линейным тензором деформации Альманси с точностью до знака) не обладает свойством материальной объективности при больших поворотах, поэтому его не используют в определяющих уравнениях для больших деформаций. В приближении малых поворотов это свойство сохраняется.
Диагональные элементы описывают линейные деформации растяжения либо сжатия, недиагональные — деформацию сдвига.
Те́нзор напряже́ний — тензор второго ранга, состоящий из девяти величин, представляющих механические напряжения в произвольной точке нагруженного тела. Эти девять величин записываются в виде таблицы, в которой по главной диагонали стоят нормальные напряжения в трёх взаимно перпендикулярных осях, а в остальных позициях — касательные напряжения, действующие на трёх взаимно перпендикулярных плоскостях.

Полный тензор механического напряжения элементарного объёма тела. Буквой σ обозначены нормальные механические напряжения, а касательные буквой τ.
Компоненты тензора напряжений σij в декартовой системе координат Oxi (т.е. Oxyz) вводят следующим образом. Рассматривают бесконечно малый объем тела (сплошной среды) в виде прямоугольного параллелепипеда, грани которого ортогональны координатным осям и имеют площади dSi. На каждой грани dSi параллелепипеда действуют поверхностные силы dFi. Если обозначить проекции этих сил на оси Oxj как dFij, то компонентами тензора напряжений называют отношение проекций силы к величине площади грани, на которой действует эта сила:

По индексу i здесь суммирования нет. Компоненты σ11, σ22,σ33, обозначаемые также как σxx, σyy,σzz — это нормальные напряжения, они представляют собой отношение проекции силы dFi на нормаль к рассматриваемой грани dSi:
 и т.д.
и т.д.
Компоненты σ12, σ23,σ13, обозначаемые также как τxy, τyz,τxz — это касательные напряжения, они представляют собой отношение проекции силы dFi на касательные направления к рассматриваемой грани dSi:
 и т.д.
и т.д.
В случае линейной теории упругости тензор напряжений симметричен (так называемый закон парности касательных напряжений).
Пластическая деформация
Строго говоря, не наблюдается ни вполне упругих, ни вполне пластических деформаций. Если стальную пластинку продержать в согнутом состоянии очень… Итак, упругая деформация у всех тел с течением времени переходит в… Вещества, у которых упругая деформация в заметной мере переходит в пластическую лишь в течение длительного времени…ВНЕШНИЕ И ВНУТРЕННИЕ СИЛЫ
движения системы, состоящей из земли и ее спутника луны, силы взаимодействия между этими телами будут внутренними силами для этой системы, а силы… Абсолютно упругий удар - соударение двух тел, в результате которого в обоих участвующих в столкновении телах не…Рис.1
При указанных допущениях законы сохранения имеют вид
 (1)
(1)
 (2)
(2)
Произведя соответствующие преобразования в выражениях (1) и (2), получим
 (3)
(3)
 (4)
(4)
откуда
 (5)
(5)
Решая уравнения (3) и (5), находим
 (6)
(6)
 (7)
(7)
Разберем несколько примеров.
1. При ν2=0
 (8)
(8)
 (9)
(9)
Проанализируем выражения (8) в (9) для двух шаров различных масс:
а) m1=m2. Если второй шар до удара висел неподвижно (ν2=0) (рис. 2), то после удара остановится первый шар (ν1'=0), а второй будет двигаться с той же скоростью и в том же направлении, в котором двигался первый шар до удара (ν2'=ν1);

Рис.2
б) m1>m2. Первый шар продолжает двигаться в том же направлении, как и до удара, но с меньшей скоростью (ν1'<ν1). Скорость второго шара после удара больше, чем скорость первого после удара (ν2'>ν1' ) (рис. 3);
Рис.3
в) m1<m2. При ударе направление движения первого шара изменяется - шар отскакивает обратно. При этом второй шар движется в сторону, в которую двигался первый шар до удара, но с меньшей скоростью, т. е. ν2'<ν1 (рис. 4);
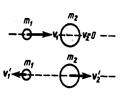
Рис.4
г) m2>>m1 (например, столкновение шара со стеной). Из уравнений (8) и (9) следует, что ν1'= -ν1; ν2' ≈ 2m1ν2'/m2.
2. При m1=m2 выражения (6) и (7) будут иметь вид ν1'= ν2; ν2'= ν1; т. е. шары равной массы как бы обмениваются скоростями.
Абсолютно неупругий удар - соударение двух тел, в результате которого тела соединяются, двигаясь дальше как единое целое. Абсолютно неупругий удар можно продемонстрировать с помощью шаров из пластилина (глины), которые движутся навстречу друг другу (рис. 5).

Рис.5
Если массы шаров m1 и m2, их скорости до удара ν1 и ν2, то, используя закон сохранения импульса


где v - скорость движения шаров после удара. Тогда
 (15.10)
(15.10)
В случае движения шаров навстречу друг другу они вместе будут продолжать движение в ту сторону, в которую двигался шар с большим импульсом. В частном случае, если массы шаров равны (m1=m2), то

Определим, как изменяется кинетическая энергия шаров при центральном абсолютно неупругом ударе. Так как в процессе соударения шаров между ними действуют силы, зависящие от их скоростей, а не от самих деформаций, то мы имеем дело с дисипативными силами, подобным силам трения, поэтому закон сохранения механической энергии в этом случае не должен соблюдаться. Вследствие деформации происходит уменьшение кинетической энергии, которая переходит в тепловую или другие формы энергии. Это уменьшение можно определить по разности кинетической энергии тел до и после удара:
Используя (10), получаем

Если ударяемое тело было первоначально неподвижно (ν2=0), то

и
Когда m2>>m1 (масса неподвижного тела очень велика), то ν<<ν1 и практически вся кинетическая энергия тела переходит при ударе в другие формы энергии. Поэтому, например, для получения значительной деформации наковальня должна быть значительно массивнее молота. Наоборот, при забивании гвоздей в стену масса молота должна быть гораздо большей (m1>>m2), тогда ν≈ν1 и почти вся энергия тратится на возможно большее перемещение гвоздя, а не на остаточную деформацию стены.
Абсолютно неупругий удар - это пример потери механической энергии под действием диссипативных сил.
1. Работа переменной силы.
Рассмотрим материальную точку, движущуюся под действием силы Р по прямой. Если действующая сила постоянна и направлена вдоль прямой, а перемещение равно s, то, как известно из физики, работа А этой силы равна произведению Ps. Теперь выведем формулу для подсчета работы, совершаемой переменной силой.

Пусть точка движется по оси Ох под действием силы, проекция которой на ось Ох есть функция f от х. При этом мы будем предполагать, что f есть непрерывная функция. Под действием этой силы материальная точка переместилась из точки М (а) в точку М (b) (рис. 1, а). Покажем, что в этом случае работа А подсчитывается по формуле
 (1)
(1)
Разобьем отрезок [а; b] на п отрезков одинаковой длины  .Это отрезки [а; x1], [x1; x2],..., [xn-1;b] (рис. 1,6). Работа силы на всем отрезке [а; b] равна сумме работ этой силы на полученных отрезках. Так как f есть непрерывная функция от x, при достаточно малом отрезке [а; x1] работа силы на этом отрезке приблизительно равна f (а) (x1—а) (мы пренебрегаем тем, что f на отрезке меняется). Аналогично работа силы на втором отрезке [x1; x2] приближенно равна f (x1) (x2 — x1) и т. д.; работа силы на n-ом отрезке приближенно равна f (xn-1)(b — xn-1). Следовательно, работа силы на всем отрезке [а; b] приближенно равна:
.Это отрезки [а; x1], [x1; x2],..., [xn-1;b] (рис. 1,6). Работа силы на всем отрезке [а; b] равна сумме работ этой силы на полученных отрезках. Так как f есть непрерывная функция от x, при достаточно малом отрезке [а; x1] работа силы на этом отрезке приблизительно равна f (а) (x1—а) (мы пренебрегаем тем, что f на отрезке меняется). Аналогично работа силы на втором отрезке [x1; x2] приближенно равна f (x1) (x2 — x1) и т. д.; работа силы на n-ом отрезке приближенно равна f (xn-1)(b — xn-1). Следовательно, работа силы на всем отрезке [а; b] приближенно равна:
и точность приближенного равенства тем выше, чем короче отрезки, на которые разбит отрезок [а;b] Естественно, что это приближенное равенство переходит в точное, если считать, что n→∞:
Поскольку An при n →∞ стремится к интегралу рассматриваемой функции от а до b, формула (1) выведена.
2. Мощность.
Мощность P - это скорость совершения работы,


Здесь v - скорость материальной точки, к которой приложена сила 
Все силы, встречающиеся в механике , принято разделять на консервативные и неконсервативные.
Сила, действующая на материальную точку, называется консервативной (потенциальной), если работа этой силы зависит только от начального и конечного положений точки. Работа консервативной силы не зависит ни от вида траектории, ни от закона движения материальной точки по траектории (см. рис. 2):  .
.
Изменение направления движения точки вдоль малого участка на противоположное вызывает изменение знака элементарной работы  , следовательно,
, следовательно,  . Поэтому работа консервативной силы вдоль замкнутой траектории 1a2b1 равна нулю:
. Поэтому работа консервативной силы вдоль замкнутой траектории 1a2b1 равна нулю:  .
.
Точки 1и 2, а также участки замкнутой траектории 1a2 и 2b1 можно выбирать совершенно произвольно. Таким образом, работа консервативной силы по произвольной замкнутой траектории L точки ее приложения равна нулю:
 или
или  . (5)
. (5)
В этой формуле кружок на знаке интеграла показывает, что интегрирование производится по замкнутой траектории. Часто замкнутую траекторию L называют замкнутым контуром L (рис. 3). Обычно задаются направлением обхода контура L по ходу часовой стрелки. Направление элементарного вектора перемещения  совпадает с направлением обхода контура L. В этом случае формула (5) утверждает: циркуляция вектора
совпадает с направлением обхода контура L. В этом случае формула (5) утверждает: циркуляция вектора  по замкнутому контуру L равна нулю.
по замкнутому контуру L равна нулю.
Следует отметить, что силы тяготения и упругости являются консервативными, а силы трения неконсервативными. В самом деле, поскольку сила трения направлена в сторону, противоположную перемещению или скорости, то работа сил трения по замкнутому пути всегда отрицательна и, следовательно, не равна нулю.
Диссипативная система (или диссипативная структура, от лат. dissipatio — «рассеиваю, разрушаю») — это открытая система, которая оперирует вдали от термодинамического равновесия. Иными словами, это устойчивое состояние, возникающее в неравновесной среде при условии диссипации (рассеивания) энергии, которая поступает извне. Диссипативная система иногда называется ещё стационарной открытой системой или неравновесной открытой системой.
Диссипативная система характеризуется спонтанным появлением сложной, зачастую хаотичной структуры. Отличительная особенность таких систем — несохранение объёма в фазовом пространстве, то есть невыполнение Теоремы Лиувилля.
Простым примером такой системы являются ячейки Бенара. В качестве более сложных примеров называются лазеры, реакция Белоусова — Жаботинского и биологическая жизнь.
Термин «диссипативная структура» введен Ильёй Пригожиным.
Последние исследования в области «диссипативных структур» позволяют делать вывод о том, что процесс «самоорганизации» происходит гораздо быстрее при наличии в системе внешних и внутренних «шумов». Таким образом, шумовые эффекты приводят к ускорению процесса «самоорганизации».
Кинетическая энергия
Изменение К. э. системы при её перемещении из положения (конфигурации) 1 в положение 2 происходит под действием приложенных к системе внешних и… При скоростях, близких к скорости света, К. э. материальной точкиКинетическая энергия.
Пусть тело движется под действием постоянной силы в направлении действия силы. Тогда: .Величина, равная половине произведения массы тела на квадрат его скорости.
Кинетическая энергия - величина относительная, зависящая от выбора СО, т.к. скорость тела зависит от выбора СО. Т.о. - эта формула выражает теорему о кинетической энергии: изменение кинетической энергии тела (материальной точки)за…Момент силы
Момент силы. Рис. Момент силы, величина, характеризующая вращательный эффект силы при действии… М. с. относительно центра О величина векторная. Его модуль Mo = Fh, где F — модуль силы, a h — плечо, т. е. длина…Кинетическая энергия вращающегося тела
Если тело вращается вокруг неподвижной оси z с угловой скоростью , то линейная скорость i-й точки , Ri – расстояние до оси вращения.… Сопоставив (6.4.1) и (6.4.2), можно увидеть, что момент инерции тела I… Здесь Ic – момент инерции относительно мгновенной оси вращения, проходящей через центр инерции.Работа и мощность при вращении твердого тела.
Найдем выражение для работы при вращении тела. Пусть сила приложена в точке ,… .Основное уравнение динамики вращательного движения
По определению угловое ускорение и тогда это уравнение можно переписать следующим образом– Конец работы –
Используемые теги: Недоказанная, неопровергнутая, гипотеза, называется, открытой, проблемой0.075
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Недоказанная и неопровергнутая гипотеза называется открытой проблемой
Что будем делать с полученным материалом:
Если этот материал оказался полезным для Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.157 сек.
Новости и инфо для студентов