рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Механика
- /
- В восьмой главе рассмотрены общие уравнения строительной механики
Реферат Курсовая Конспект
В восьмой главе рассмотрены общие уравнения строительной механики
В восьмой главе рассмотрены общие уравнения строительной механики - раздел Механика, Предисловие Предлагаемый В...
ПРЕДИСЛОВИЕ
Предлагаемый вниманию читателей учебник написан в соответствии с программой по строительной механике для студентов строительных специальностей. В связи с появлением ЭВМ строительная механика претерпела серьезные изменения. Поэтому всю историю развития строительной механики можно разделить на два периода: до появления ЭВМ (классическая строительная механика) и после появления ЭВМ. В первой части настоящего курса рассматривается классическая строительная механика. Классические расчетные схемы (балки, арки, фермы, рамы, комбинированные системы) позволяют понять работу сооружений через работу простейших расчетных схем. Это имеет огромное значение для развития инженерной интуиции, без которой невозможно проектирование сооружений.
Появление ЭВМ резко расширило рамки строительной механики. Произошел резкий поворот в сторону метода перемещений. Появился метод конечных элементов (МКЭ), позволяющий рассчитывать стержневые и нестержневые системы (пластинчатые, оболочечные, пластинчато-стержневые, оболочечно-стержневые и т. д.) с единых позиций. Резко расширились задачи, решаемые в разделе динамики сооружений.
При написании курса авторы стремились, во-первых, максимально использовать накопленный опыт преподавания классической строительной механики, во-вторых, отразить современное состояние строительной механики как стержневых, так и нестержневых конструкций.
Первые семь глав курса посвящены классической строительной механике. При этом авторы придерживались хорошо методически проработанного традиционного изложения, исключив второстепенные вопросы, связанные с упрощением арифметических выкладок (метод упругих грузов, матрицы влияния и т. д.). Дальнейшее изложение к^рса является нетрадиционным, поэтому остановимся на этой части подробно.
В восьмой главе рассмотрены общие уравнения строительной механики. Эти уравнения в существующих курсах не нашли долж-
ного отражения, так как их использование приводит к громоздким арифметическим выкладкам при решении практических задач. Однако эти уравнения позволяют более глубоко понять сущность строительной механики. Кроме того, эти уравнения пишутся чисто формально и их составление легко автоматизируется с использованием ЭВМ. При этом метод сил и метод перемещений могут рассматриваться как способы решения системы уравнений смешанного метода. Далее показана связь уравнений строительной механики с уравнениями теории упругости. Таким образом, показано, что курс строительной механики тесно связан с курсом теории упругости. Общие уравнения строительной механики являются тем мостиком, по которому совершается переход от расчета стержневых систем без использования ЭВМ к расчету стержневых систем с использованием ЭВМ.
В девятой главе рассмотрен расчет стержневых систем с использованием ЭВМ. Для лучшего понимания расчета на ЭВМ первоначально рекомендуется провести ряд расчетов на калькуляторах. Широкое использование калькуляторов и их доступность позволяют лучше и быстрее понять работу программы на ЭВМ. Далее показано, что наиболее удобным методом расчета стержневых систем на ЭВМ является метод перемещений. В настоящее время все большее распространение получают персональные ЭВМ (например, «Иск-ра-256»). Простота программирования приведет к широкому их использованию как в обучении студентов, так и в практике проектирования. В персональных ЭВМ заложен простейший язык БЕЙСИК, в котором имеются операции над матрицами, с использованием которых легко записать алгоритм расчета стержневых систем. Поэтому курс строительной механики стержневых систем заканчивается описанием простейшего программного комплекса для персональной ЭВМ, который составляется студентами под руководством преподавателя.
В курсе строительной механики студенты должны составить свой простейший программный комплекс, который они в дальнейшем могут адаптировать для решения тех или иных задач. В спецкурсах или дипломном проектировании студенты должны либо использовать свой комплекс, либо применять существующие универсальные программные комплексы (например, ЛИРА, СПРИНТ и др.). При использовании универсальных комплексов центральным вопросом является организация входных и выходных данных, поэтому в настоящем курсе рассмотрены эти вопросы с общих позиций.
В десятой главе рассмотрены вопросы расчета стержневых систем с учетом геометрической и физической нелинейности. При изложении расчета стержневых систем с учетом геометрической нелинейности рассмотрены также и вопросы устойчивости. Для решения геометрически и физически нелинейных задач предлагается использовать простейший линейный программный комплекс, составленный студентами по материалам предыдущей главы. При изложении расчета стержневых систем с учетом физической нелинейности рассмотрены и вопросы приспособляемости.
В одиннадцатой главе изложены основы метода конечных элементов, который является естественным распространением методов расчета стержневых систем на системы нестержневые (континуальные). Общие уравнения стержневых систем, на примере расчета клина, распространяются на решение плоской задачи теории упругости и тем самым показывается тесная связь расчета систем стержневых с системами нестержневыми. Далее рассматривается МКЭ в форме метода перемещений. Построены матрицы жесткости для прямоугольного и треугольного элементов. Показано, на примере плоской задачи, что при стремлении размеров прямоугольного элемента к нулю алгебраические уравнения МКЭ переходят в дифференциальные уравнения теории упругости. Рассмотрены вопросы построения матриц жесткости для сложных элементов, суперэлементный подход и особенности комплексов по расчету конструкций с использованием МКЭ.
Следующая, двенадцатая глава посвящена основам динамики. Первоначально рассматриваются системы с одной степенью свободы и подробно изучаются методы решения дифференциального уравнения движения. Далее рассматривается система с двумя степенями свободы.
Особенностью изложения раздела динамики является широкое применение численных методов и персональных ЭВМ (значительное количество графиков в этой главе получено с использованием графопостроителя).
При изучении курса предполагается, что читатель знаком с классическим курсом математики в объеме, соответствующем программе вуза, поэтому последняя, тринадцатая глава содержит некоторые дополнительные сведения из математики, используемые в строительной механике. Основное внимание уделено исследованию и решению систем линейных уравнений по методу Гаусса.
Глубокие знания в области строительной механики позволят инженеру при проектировании различных конструкций резко снизить их материалоемкость, перейти на производство новых поколений машин, оборудования и крупных экономичных сооружений. Учебник предназначен для студентов вузов строительных специальностей и может быть использован инженерами-проектировщиками в их практической деятельности. При написании книги широко использован опыт работы на ЭВМ, поэтому учебник полезен также для аспирантов и научных работников, работающих в области строительной механики.
Авторы выражают свою искреннюю благодарность профессорам Н. Н. Леонтьеву и Н. П. Абовскому, а также коллективу кафедры «Строительная механика» Красноярского инженерно-строительного института за сделанные ими замечания, которые способствовали улучшению содержания учебника, а также признательны Л. М. Швацману за составление программ для решения примеров и Л. М. Шапошниковой и И. А. Зубриловой за помощь при оформлении рукописи.
Третьим типом опоры является так называемая защемляющая неподвижная опора, или заделка (рис. 1.5), степень свободы которой равна нулю. Реакция такой опоры определяется тремя параметрами, например: величиной и направлением силы, проходящей через произвольную точку, и моментом относительно этой точки. Эту реакцию можно представить как сочетание реактивного момента в заделке (опорном сечении) с реакцией шарнирно-неподвижной опоры.
Схематически опора третьего типа может быть представлена тремя стержнями (рис. 1.6); для того чтобы заделку можно было считать абсолютно жесткой, расстояние 1й должно быть очень малым или брус на участке длиной /0 надо рассматривать как бесконечно жесткий.
Отметим, что число стержней в схематическом изображении любой опоры всегда равняется числу параметров, определяющих полную реакцию этой опоры.
§ 1.2. УСЛОВИЯ ГЕОМЕТРИЧЕСКОЙ НЕИЗМЕНЯЕМОСТИ СТЕРЖНЕВЫХ СИСТЕМ Q -^- П V — ^ — - ^х
3 ^ К
,V, 4.,, ф Ц_
Стержневыми системами называются системы, состоящие из отдельных, обычно прямолинейных, стержней, соединенных между собой в узлах с помощью сварки, заклепок, болтов или других скреплений; одним из видов таких систем являются плоские фермы.
В большинстве случаев соединения стержней фермы в узлах являются жесткими — не шарнирными. Точный расчет фермы с такими узлами весьма сложен, так как обычно она является много раз статически неопределимой системой. Если жесткие узлы фермы условно заменить шарнирными, то расчет ее значительно упрощается и при известных условиях может быть выполнен с помощью одних лишь уравнений статики. Опытные данные и теоретические исследования показывают, что такая замена допустима, так как при сосредоточенных нагрузках, приложенных в узлах, усилия,
|
| Рис. 1.7 |
возникающие в шарнирной ферме, мало отличаются от усилий в ферме с жесткими узлами (в случае, когда стержни имеют достаточно большую длину). Поэтому в дальнейшем будем пользоваться условной расчетной схемой фермы со стержнями, шарнир-, но соединенными в узлах.
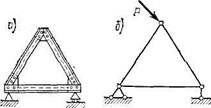
Если заменить жесткие узлы системы, состоящей из трех стержней (изображенной на рис. 1.7, а), шарнирами, то система останется геометрически неизменяемой (рис. 1.7, б), т. е. такой, изменение формы которой возможно лишь в связи с деформациями ее элементов. Если же заменить жесткие узлы шарнирами в системе, состоящей из четырех стержней (изображенной на рис. 1.8, а), то полу-
чится система геометрически изменяемая (рис. 1.8, б), т. е. такая, форма которой может меняться без деформации ее элементов,
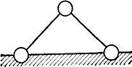
Наипростейшей геометрически неизменяемой, сочлененной из отдельных элементов, шарнирной системой (фермой) является система, состоящая из трех
стержней, соединенных шарнирами в треугольник (см. рис. 1.7, б).
Установим, как может быть образована геометрически неизменяемая система, состоящая более чем из трех стержней, соединенных шарнирами.
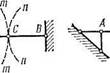
Предварительно рассмотрим систему из двух стержней (рис. 1,9), лежащих на одной прямой и соединяющих узел С с двумя неподвижными точками А и В. Если разъединить стержни АС и ВС в точке С, то конец С стержня АС переместится по окружности т — т, а конец С стержня ВС — по окружности п — п. Эти окружности в точке С имеют общую касательную. Следовательно, если точка С одного из стержней получит весьма малое перемещение по перпендикуляру к АВ, то другой стержень не сможет воспрепятствовать
т
| S) |
| ■к л | i i i i i | —-9 / / 1 | |
| (X J. | |||
| Рис. | 1.8 |

|
| п т |
 *)
*)
| Рис. 1.9 |
Рис. 1.10
этому перемещению. Таким образом, рассматриваемая система является геометрически изменяемой, так как ее форма может меняться при неизменной длине стержней, т. е. при отсутствии деформаций ее элементов.
Систему с двумя стержнями, лежащими на одной прямой (рис. 1.9), в дальнейшем будем называть мгновенно изменяемой, так как она в следующее мгновение после малого смещения точки С по перпендикуляру к прямой АВ превращается в неизменяемую систему.
Иная картина получается, если стержни АС и ВС не лежат на одной прямой (рис. 1.10); в этом случае окружности т — тип — п не имеют общей касательной, а потому даже малое перемещение узла С невозможно без деформации стержней.
Таким образом, всякий новый узел, добавляемый в процессе образования геометрически неизменяемой системы, может быть присоединен с помощью двух стержней, оси которых не должны лежать на одной прямой.
Следовательно, системы, полученные из шарнирного треугольника путем последовательного присоединения узлов, причем каж-
дого двумя стержнями, не лежащими на одной прямой, геометрически неизменяемы, т. е. геометрическая структура их неизменяема. Такие системы (или фермы) называют простейшими в отличие от сложных, которые получают обычно в результате видоизменения
| в |
| N | N | / |
| с 2 |
простейших, в частности, с помощью замены одних стержней другими, или путем наложения одной системы на другую х.
| 11 |
К простейшим системам относятся фермы, представленные на рис. 1.11. Каждая из них получена последовательным присоединением шарнирных узлов указанным ■ выше способом к основному шарнирному треугольнику abc в порядке, обозначенном на чертеже цифрами. В качестве основных треугольников abc при проверке геометрической неизменяемости простейших ферм могут быть приняты любые шарнирные соединения трех стержней.
Ферма, состоящая только из
треугольников, геометрически не
изменяема. Любой шарнирный
треугольник ее может рассматри
ваться как основной. Проверку
геометрической неизменяемости
простейших ферм можно произво
дить и обратным путем, т. е. по
следовательно отбрасывая каждый
узел и два стержня, прикрепляю
щих его к остающейся части фер
мы. Если в результате этого полу
чится система в виде шарнирного
треугольника, то рассматриваемая
ферма геометрически неизменяема.
Установим зависимость между
числом узлов и числом стерж-
Рис. 1.11 ней, необходимых для получения
простейшей фермы. Такая ферма,
как уже известно, образуется из основного шарнирного треугольника путем последовательного присоединения новых узлов, при этом каждого с помощью двух стержней, не лежащих на одной прямой.
1 О структуре плоских систем см. в кн.- Рабинович И М Кинематический метод в строительной механике. М., Изд. Московского высшего технического училища, 1928,
Обозначим: S — число стержней такой фермы, К — число ее узлов. Основной треугольник имеет три узла и три стержня; каждый »з остальных присоединяемых узлов в количестве (К—3) прикрепляется двумя стержнями. Поэтому полное__число стержней в простейшей геометрически неизменяемой ферме ~~~^j
S=3+2(^-3), '
| (1.1) |
или
S=2K—3.
| Рис. 1.12 |
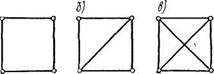 Если число стержней S<2K—3, то это показывает, что ферма в своем составе не имеет минимального количества стержней, необходимого для образования геометрически неизменяемой а) системы. Следовательно, в этом случае система геометрически изменяема. Примером такой системы может служить четырехугольник (рис. 1.12, а), в котором 5=4, К= — 4; следовательно,
Если число стержней S<2K—3, то это показывает, что ферма в своем составе не имеет минимального количества стержней, необходимого для образования геометрически неизменяемой а) системы. Следовательно, в этом случае система геометрически изменяема. Примером такой системы может служить четырехугольник (рис. 1.12, а), в котором 5=4, К= — 4; следовательно,
S=4<2K—3=2-4—3=5.
Превращение его в неизменяемую систему может быть достигнуто
включением пятого диагонального стержня (рис. 1.12, б). Если,
далее, введем вторую диагональ — шестой стержень (рис. 1.12, в),
то с точки зрения геометрической неизменяемости этот стержень
а) будет уже лишним. Из этого примера видно,
. что могут встречаться геометрически неизме-

|
няемые системы, в которых S>2K—3.
| -5 |

|
| Рис 1 13 |
Заметим, что соотношение S^2K—3 является необходимым, но еще недостаточным условием неизменяемости фермы. Так, ферма, изображенная на рис. 1.13, а, геометрически изменяема, хотя имеет число стержней S', равное 2/С—3; на рис. 1.13, б изображена изменяемая ферма, для которой S>2K—3. Изменяемость этих ферм обьясняется тем, что правые их части представляют собой шарнирные четырехугольники. Кроме того, стержневые системы, удовлетворяющие условию S=2K—3, могут быть мгновенно изменяемыми.
Перейдем теперь к вопросу о присоединении геометрически неизменяемой системы к земле посредством опор.
Наиболее часто cooJ)yжgДtШ^(да£iili)пиpa_eтcя на две шарнирные опоры, одна из которых неподвижная, другая подвижная (рис. 1.14, а). Такая связь сооружения с землей o6ecne4HBjjeTjyvnr геометрическую неизменяемость^ Не обязательно, чтобы два из трех опорных стержней объединялись одним общим шарниром;
стержни геометрически неизменяемой системы могут и не иметь общих шарниров (рис. 1.14, б).
Если все опорные стержни расположены так, что их направления пересекаются в одной точке О (рис. 1.15, а), то эта точка является мгновенным центром, вокруг которого система может совершать бесконечно малое вращательное перемещение (практически это перемещение может быть конечным, но малым). После такого
 а)
а)
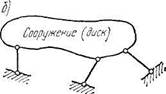
Рис. 1.14
перемещения все опорные стержни уже не будут пересекаться в одной точке и потому дальнейшие перемещения будут невозможны без деформации стержней.
Система, прикрепленная к земле подобным образом, обладает мгновенной подвижностью (мгновенной изменяемостью); такое расположение стержней недопустимо 1. Таким образом, прикрепление системы к земле с помощью трех стержней возможно лишь в том
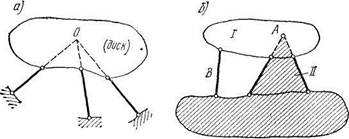
Рис. 1.15
случае, когда оси этих стержней не пересекаются в одной точке и не параллельны друг другу2.
Распространяя это положение на случай взаимного соединения двух любых геометрически неизменяемых систем (дисков), можно сформулировать следующее правило: два диска образуют геометрически неизменяемую систему, если они связаны между собой с помощью трех стержней, оси которых не пересекаются в одной точке и не параллельны друг другу.
 1 Далее, в § 5.4 показано, что в мгновенно изменяемой системе при действии
1 Далее, в § 5.4 показано, что в мгновенно изменяемой системе при действии
даже незначительной внешней нагрузки могут возникать очень большие усилия.
2 Так как направления параллельных стержней пересекаются в одной точке,
находящейся в бесконечности,
|
Если в точке пересечения направлений любых двух из этих трех стержней поставить шарнир и соединить его с диском, то система не станет геометрически изменяемой, но это даст возможность рассматривать ее как состоящую из двух дисков I и II, связанных друг с другом одним общим шарниром А и стержнем В (рис. 1.15, б). Следовательно, к диску можно геометрически неизменяемо присоединить другой диск с помощью общего для обоих дисков шарнира и стержня, направление которого не должно проходить через этот шарнир.
| Ряс. 1.1 в |
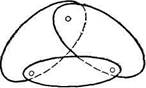
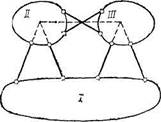
Сочленение трех дисков в одну общую геометрически неизменяемую систему можно осуществить, соединив их в rj реугольник с помощью трех шарниров, не расположенных на одной прямой (рис. 1.16), или с помощью шести стержней, как это показано на рис. 1.17, так как каждый шарнир может быть заменен двумя стержнями, пересекающимися в его центре.
Система, изображенная на рис. 1.18, мгновенно изменяема, так как точки пересечения осей стержней, связывающих каждую пару дисков, лежат на одной прямой. Она аналогична системе, показанной на рис. 1.9.
|
|
Рис. 1.17
Рис. 1.18
Итак, три диска, соединенных с помощью шести стержней так, что между каждой парой дисков установлено по два стержня, точки пересечения которых не лежат на одной прямой, представляют собой геометрически неизменяемую систему.
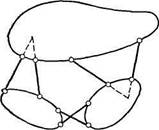
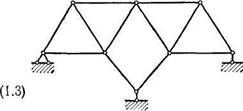
На рис. 1.19, а — к приведен ряд систем, образованных указанными способами.
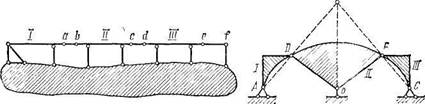
На рис. 1.20 изображена система, представляющая собой один из возможных вариантов многопролетной статически определимой балки (более подробно такого рода системы рассмотрены в § 2.9). Установим ее геометрическую неизменяемость. Для этого выделим из балки какую-нибудь геометрически неизменяемую систему (диск), неподвижно соединенную с землей тремя стержнями, а затем постараемся убедиться в том, что каждая следующая геометрически неизменяемая система присоединяется к диску (т. е. к земле и уже присоединенным к ней системам) с помощью трех стержней.
Рассматривая стержень /, убеждаемся в том, что он неподвижно соединен с землей тремя стержнями, не пересекающимися в одной точке и не параллельными между собой; стержень //, соединенный двумя стержнями с землей и одним стержнем ab со стержнем /,
4 г)
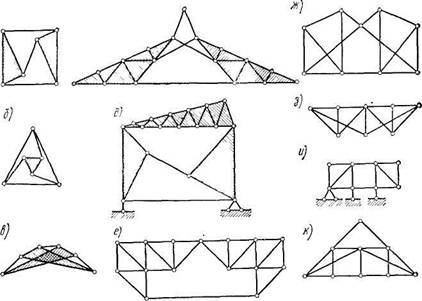
Рис. 1.19
также образует неизменяемую систему; к этой системе аналогично (с помощью стержня сс/и двух опорных стержней) присоединен стержень ///; наконец, к этому стержню посредством шарнира е и опорного стержня присоединен последний элемент ef. Следовательно, вся система в целом является геометрически неизменяемой.
|
| Рис. 1.20 |
| Рис. 1.21 |
Е
Рассмотрим теперь пример геометрически изменяемой системы (рис. 1.21). Диски / и /// по отношению к диску // можно рассматривать как опорные стержни AD и CF; тогда диск // оказывается прикрепленным к земле тремя стержнями AD, CF и вертикальным стержнем В, оси которых пересекаются в точке Е. Следовательно, система является мгновенно изменяемой.
§ 1.3. УСЛОВИЯ СТАТИЧЕСКОЙ ОПРЕДЕЛИМОСТИ ГЕОМЕТРИЧЕСКИ НЕИЗМЕНЯЕМЫХ СТЕРЖНЕВЫХ СИСТЕМ
Выше было установлено, что связь сооружения с землей, схематически изображаемая тремя стержнями, не пересекающимися в одной точке, геометрически неизменяема. Такая связь статически определима, так как число усилий в этих стержнях равно числу уравнений статики (например, 2^=0, 2^=0 и ^М=0), которые можно составить для плоской системы сил, находящейся в равновесии.
Сооружение статически определимо относительно опорных закреплений лишь в том случае, когда число параметров, определяющих реакции этих закреплений, равно трем. Этому условию удовлетворяют, например, следующие две системы опорных закреплений:
1) комбинация шарнирно-подвижной и шарнирно-неподвижной
опор — для сооружений, опираю- а,
щихся в двух точках (рис. 1.22, а);
| / |
| R |
2) комбинация трех шарнирно-
подвижных опор (рис. 1.22,6) —
при наличии трех опорных точек в
сооружении; при этом направле
ния реакций (на рисунке показаны
штриховыми линиями) всех трех
опор не должны пересекаться в од
ной точке и не должны быть napai-
лельны друг другу.
| Рис. 1.22 |
Наличие у геометрически неизменяемой системы четырех и более опорных стержней, среди которых имеется три стержня с направлениями осей, не пересекающимися в одной точке и не параллельными друг другу, указывает на то, что сооружение статически неопределимо (рис. 1.23). Статически неопределимое сооружение нельзя рас-
 ~ а) - J) ~
~ а) - J) ~
| Рис. 1.24 |
Рис. 1.23
считывать с помощью одних лишь уравнений статики; для этого требуется составить дополнительные уравнения,^основанные на изучении его деформаций.
Перейдем теперь к условиям, которым должны удовлетворять сами статически определимые стержневые системы (фермы), т. е. такие системы, усилия в элементах (стержнях) которых могут быть найдены с помощью одних лишь уравнений статики.
При действии на шарнирную ферму сосредоточенных сил, приложенных в узлах (шарнирах), в ее прямолинейных стержнях возникают одни лишь продольные (сжимающие или растягивающие)
|
силы. Для доказательства условия этого выделим из фермы (рис. 1.24, а) стержень ab (рис. 1.24, б) и рассмотрим условия его равновесия.
| Рис. 1.25 |
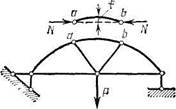
Если к элементу ab непосредственно не приложена внешняя нагрузка, то равновесие его возможно только тогда, когда силы N, действующие на стержень от шарниров а и Ь, равны друг другу по числовому значению величины и направлены в противоположные стороны. Силы N проходят через центры шарниров, так как соединения стержней в узлах предполагаются выполненными с помощью идеальных шарниров (свободных от трения). Следовательно, силы N направлены вдоль прямой, проходящей через центры шарниров а и Ь, а потому вызывают в поперечных сечениях стержня ab лишь продольные силы. Если ферма имеет криволинейные стержни, то в поперечных сечениях этих стержней кроме продольных сил возникают изгибающие моменты, вызывающие в них дополнительные напряжения. Наибольшие значения этих моментов M=Nf (рис. 1.25).
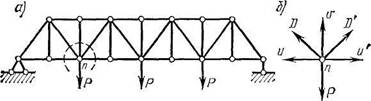
Рис. 1.26
Если ферма в целом (рис. 1.26, а) под действием сил, приложенных к ее узлам, находится в равновесии, то и любой из ее узлов (рис. 1.26, б) также находится в равновесии, т. е. внешняя нагрузка, действующая на узел, и внутренние усилия в стержнях, сходящихся в данном узле, взаимно уравновешиваются.
На каждый узел фермы действует система сил, пересекающихся в одной точке. Для такой системы сил статика дает два уравнения равновесия:
2*=о и 2^=о-
Если ферма имеет К узлов, то для них можно составить 2/С уравнений равновесия, с помощью которых должны быть найдены усилия во всех стержнях фермы и три неизвестные опорные реакции.
Дюбые другие уравнения равновесия для отдельных частей фермы (например, группы узлов) или для всей фермы в целом могут быть получены из этих уравнений, а потому не дадут новых условий для определения неизвестных усилий. Следовательно, ферма будет статически определима, если число стержней ее 5 равно удвоенному числу узлов минус 3:
=2^—3.
(1.2)
Полученная зависимость между числом стержней и числом узлов статически определимой фермы совпадает с условием (1.1) ее геометрической неизменяемости.
 Следовательно, всякая простейшая ферма, т. е. ферма, образованная из стержневого шарнирного треугольника последовательным присоединением узлов (каждого с по'мощью двух стержней, не лежащих на одной прямой), является системой геометрически неизменяемой и одновременно статически определимой.
Следовательно, всякая простейшая ферма, т. е. ферма, образованная из стержневого шарнирного треугольника последовательным присоединением узлов (каждого с по'мощью двух стержней, не лежащих на одной прямой), является системой геометрически неизменяемой и одновременно статически определимой.
Если при подсчете числа стержней S системы учесть и опорные стержни, то условие 5=2/С—3 примет вид
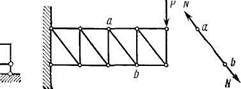
Этой формулой удобно пользоваться в тех случаях, когда сооружение хотя и является геометрически изменяемым (т. е. количество 5 его стержней меньше, чем 2К—3), но так связано с землей, что образует вместе с ней единую геометрически неизменяемую статически определимую систему. Пример такого сооружения дан на рис. 1.27. Для него /С=8, количество стержней в сооружении 5 (без опорных) равно 12. Таким образом, оно не удовлетворяет условию (1.1): S=2K~3 (так как 5=12, а 2/С—3=2-8—3 = 13) и, следовательно, является геометрически изменяемым. Однако So6ni системы вместе с опорными стержнями, равное 16, удовлетворяет условию (1.3), а потому эта система может быть (и в данном случае является) геометрически неизменяемой статически определимой системой 1.
Все стержни статически определимой системы являются с точки зрения геометрической неизменяемости безусловно необходимыми, т. е. в такой системе нет ни одной лишней связи (ни одного лишнего стержня).
Если геометрически неизменяемая система в своем составе .имеет
_число стержней, превышающее минимально необходимое, то она
является статически неопределимой. ~ ~
Рис. 1.27
Методы исследования такого рода систем см, в § 4.5,
Глава 1
КИНЕМАТИЧЕСКИЙ АНАЛИЗ СООРУЖЕНИЙ
В курсе строительной механики рассматривается расчет геометрически неизменяемых систем (сооружений), т. е. таких, перемещения отдельных точек… Первый тип опоры представлен на рис. 1.1. Он состоит из двух балансиров —… …Рис. 1.1
V////
Рис. 1.3
этому валику верхний балансир может поворачиваться относительно нижнего. Кроме того, он можег (вместе с нижним балансиром, опирающимся на катки 4) перемещаться по опорной плоскости, называемой опорной подушкой 5.
Рассматриваемая опора имеет, следовательно, две степени свободы (изменяемости). Трением, развивающимся в опоре, принято при расчете пренебрегать, а потому реакция такой опоры представ-
 1 Под термином «земля» понимается геометрически неизменяемая система —
1 Под термином «земля» понимается геометрически неизменяемая система —
диск
2 В дальнейшем при расчете плоских систем цилиндрический шарнир будем
называть шарниром.
ляет собой силу, проходящую через центр шарнира и перпендикулярную направлению возможного перемещения катков, т. е. верхней плоскости опорной подушки. Эта сила определяется одним параметром —'- ее величиной. Рассматриваемая опора носит название цилиндрической подвижной или шарнирно-подвижнои. Схематически ее изображают в виде одного стержня с двумя идеальными (без трения) шарнирами на концах1 (рис. 1.2).
|
У/////////.
V/,
Рис. 1.4
Рис. 1.5
Стержень, схематически изображающий шарнирно-подвижную опору, условно принимается бесконечно длинным; верхняя точка такого стержня может перемещаться лишь по прямой линии (прямая есть окружность бесконечно большого радиуса), перпендикулярной его оси, что полностью соответствует тем условиям, в которых находится действительная шарнирно-подвижная опора. Собственные деформации опоры при расчетах не учитываются, т. е. опорный стержень условно считается бесконечно жестким.
| У////////////////////////А |
| Опорное сечение |
| I Рис. 1.6 |
Второй тип опоры (рис. 1.3) отличается от первого тем, что нижний балансир 3 закреплен и не может перемещаться. Такая опора обладает одной степенью свободы и носит название цилиндрической неподвижной или шарнирно-неподвижной. Реакция ее представляет собой силу, проходящую через центр шарнира. Эта сила может иметь любое направление и определяется, следовательно, двумя параметрами — величиной и направлением (или, что то же самое, величинами двух составляющих ее сил, например вертикальной и горизонтальной).
Схематически опора второго
типа изображается с помощью двух стержней с идеальными шарнирами по концам; верхний шарнир является общим для обоих стержней (рис. 1.4). Такая схема определяет точку приложения опорной реакции (центр верхнего шарнира), оставляя ее направление неизвестным.
Направления стержней на схеме шарнирно-неподвижной опоры могут быть выбраны вполне произвольно, так как силу (реакцию) можно разложить на два любых направления.
1 Иногда шарнирно-подвижная опора осуществляется в виде колонны с двумя шарнирами по концам, тогда она называется качающейся опорой или качающейся стойкой,
– Конец работы –
Используемые теги: восьмой, главе, рассмотрены, общие, уравнения, строительной, механики0.102
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: В восьмой главе рассмотрены общие уравнения строительной механики
Что будем делать с полученным материалом:
Если этот материал оказался полезным для Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.181 сек.
Новости и инфо для студентов