рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Образование
- /
- Работа 1. ПЛАНИРОВАНИЕ ДРОБНОГО ФАКТОРНОГО ЭКСПЕРИМЕНТА
Реферат Курсовая Конспект
Работа 1. ПЛАНИРОВАНИЕ ДРОБНОГО ФАКТОРНОГО ЭКСПЕРИМЕНТА
Работа 1. ПЛАНИРОВАНИЕ ДРОБНОГО ФАКТОРНОГО ЭКСПЕРИМЕНТА - раздел Образование, Работа 1. Планирование Дробного Факторного Эксперимента...
Работа 1. ПЛАНИРОВАНИЕ ДРОБНОГО ФАКТОРНОГО ЭКСПЕРИМЕНТА
Цель работы - приобретение практических навыков в планировании и проведении экспериментов при поиске параметров линейной модели сложной системы управления.
Порядок выполнения работы
Работу следует выполнять в таком порядке: 1. Подготовить исходные данные для проведения эксперимента (варианты исходных… — составить модель локального участка целевой функции;Общие сведения
Статистические методы планирования активного эксперимента являются одним из эмпирических способов получения математического описания сложных объектов исследования, т.е. уравнения связи отклика объекта у и независимых управляемых входных переменных (факторов) х=(x1,x2,…,xk).
При этом математическое описание представляется в виде некоторого полинома — отрезка ряда Тейлора, в который разлагается неизвестная зависимость в окрестности основной точки x, например:
M{y}=j(x1,x2,…,xn)=b0+åbjxj+åbjlxjxl+åbjjxj2, j,l=1..k, l<j (1.1)
где bj,bjl ,bjj – теоретические коэффициенты:
 ;
;  ;
; 
Вследствие наличия неуправляемых и даже неконтролируемых факторов изменение величины у носит случайный характер, поэтому функциональная зависимость j(x) не дает точной связи между управляемыми факторами x(i) и откликом объекта yi, в каждом i-м опыте, а лишь между управляемыми факторами и математическим ожиданием случайной величины y:
M{yi}=j(x(i)) (1.2)
где j(x) – уравнение регрессии у по х; x(i)=(x1(i), x2(i),…, xn(i) ) – i-я точка пространства независимых управляемых факторов (факторного пространства).
В таком случае по результатам эксперимента можно отыскать оценку уравнения регрессии у=j(x) в форме некоторого полинома
уМ=b0+åbjxj+åbjlxjxl+åbjjxj2, j,l=1..k, l<j (1.3)
где коэффициенты b0, b1,…, bj,…, bjj являются лишь оценками теоретических коэффициентов регрессии b0, b1, bj, bjj соответственно, а уМ — оценкой М{y}, вычисленной по уравнению регрессии (1.3). Пусть x(i)(i=1,N) — точки факторного пространства, в которых проводится эксперимент. Тогда задача отыскания оценок коэффициентов уравнения регрессии (1.3) по результатам опытов в N точках факторного пространства является типичной задачей множественного регрессионного анализа в том случае, если выполняются следующие предпосылки:
1. Результаты наблюдений отклика y1, y2,…, yN в N точках факторного пространства представляют собой независимые нормально распределенные случайные величины, т.е. на них воздействуют нормально распределенные случайные помехи x, с нулевым математическим ожиданием M[x].
2. Дисперсии s2{y1} (i=1,N) равны. Это значит, что дисперсия s2{y1} не зависит от значения входных переменных x и получаемые при проведении многократных повторных наблюдений над величиной y в любых точках x(i) факторного пространства выборочные оценки дисперсии si (у) однородны (воспроизводимость с равной точностью).
3. Независимые управляемые факторы x1, x2,…, xk измеряются с пренебрежимо малыми ошибками по сравнению с ошибкой x, в определении у (имеется в виду влияние их ошибок на величину у по сравнению с влиянием неуправляемых и неконтролируемых факторов).
Для локального участка в пределах заданной точности поверхность отклика может быть аппроксимирована полиномом первой степени
yM=b0+åbjxj j=0..k (1.4)
Положение локального участка задается координатами базовой (центральной) точки (x10, x20,…, xk0), называемой центром эксперимента, и величиной интервалов варьирования Dx1, Dx2,…, Dxk.
Выбор координат базовой точки должен отвечать следующим условиям:
— центр эксперимента принимается в точке обычного номинального режима
функционирования исследуемой системы (объекта);
— базовая точка может находиться в центре области ограничения факторов хi, если они имеются в наличии, а другой информации о целевой функции нет;
— если имеется какая-то информация относительно положения экстремума целевой функции, то целесообразно центр эксперимента выбрать вблизи предполагаемого оптимума.
Интервалы варьирования выбираются исходя из следующих соображений. Большие интервалы варьирования не позволяют определить особенности поверхности отклика. Слишком малые интервалы обусловливают рост погрешностей в оценке составляющих градиента за счет возрастания ошибки наблюдений. Кроме того, необходимо, чтобы входные и выходные переменные не выходили за допустимую область:
xj min£xj£xj max, j=1,k (1.5)
где xj min, xj max — нижняя и верхняя границы изменения j-го фактора.
В общем случае выбор локального участка (центра плана и интервалов варьирования) зависит от вида поверхности отклика. В лабораторной работе начальные координаты центра плана принимаются равными середине области определения факторов, а начальные значения интервалов варьирования обычно принимаются равными 1...5% от величины указанной области.
При построении плана эксперимента в локальной области факторного пространства используется кодировка уровней факторов с помощью формулы

где хj— кодированное значение уровня фактора; хj~ — реальное значение уровня фактора в натуральных единицах; хj0~ — значение фактора в центре плана в натуральных единицах; Dxj~— интервал варьирования в натуральных единицах.
Если число факторов известно и планирование проводится на двух уровнях, то число опытов, необходимое для реализации всех возможных комбинаций уровней факторов, будет
N=2k
Условия эксперимента можно записать в виде таблицы, где строки соответствуют различным опытам, а столбцы — значениям факторов. Например, для двух факторов условия эксперимента приведены в табл. 1.1.
Таблица 1.1
| Номер | Фактор | Отклик | |
| х1 | х2 | у | |
| -1 | -1 | у1 | |
| +1 | -1 | у2 | |
| -1 | +1 | у3 | |
| +1 | +1 | у4 |
Сформированный подобным образом план эксперимента называется
двухуровневым полным факторным экспериментом (ПФЭ) типа 2k . Для его построения можно воспользоваться следующим приемом: в первом столбце знаки меняются поочередно, во втором — чередуются через два, в третьем — через четыре, в четвертом — через восемь и т.д.
План, соответствующий построенной таким образом матрице планирования (МП), обладает следующими свойствами:
1) симметричность относительно центра эксперимента — алгебраическая сумма элементов вектор-столбца каждого фактора равна нулю:
åx(i)j=0, i=1,N, j=1,k
2) условие нормировки — сумма квадратов элементов каждого столбца равна числу опытов:
å (x(i)j)2=N, i=1,N, j=1,k
3) ортогональность матрицы — скалярное произведение любых двух векторов-столбцов матрицы равна нулю:
åx(i)j* x(i)u =0, j¹u, i=1,N, j,u=1,k
Полный факторный эксперимент дает возможность вычислить независимо коэффициенты, соответствующие не только линейной части модели (1.1), но и эффектам взаимодействия. Во многих практических задачах влияние взаимодействий (произведений факторов) второго и более высоких порядков отсутствует или пренебрежимо мало. Кроме того, на первых этапах исследования часто достаточно получить в первом приближении лишь линейную аппроксимацию изучаемого уравнения связи при минимальном количестве опытов. Поэтому неэффективно использовать ПФЭ для оценивания коэффициентов лишь при линейных членах и некоторых парных произведениях из-за избыточного числа точек плана (2k), в особенности при большом числе факторов k (для определения (k+1) коэффициентов линейной модели достаточно (k + 1) точек плана эксперимента).
Дробным факторным экспериментом (ДФЭ) называется эксперимент, реализующий часть (дробную реплику) полного факторного эксперимента. Он позволяет получить, например, линейное приближение искомой функциональной зависимости М {у} = j(х) в некоторой небольшой окрестности точки базового режима при меньшем числе опытов.
Так, для решения трехфакторной (k = 3) задачи регрессии в линейном приближении можно ограничиться четырьмя вариантами варьирования, если для плана ПФЭ типа 22 переменных х 1 , х 2 произведение х 1, х 2 приравнять третьему независимому фактору х 3. Использование матрицы планирования, представленной в табл. 1.2, позволяет найти свободный член b 0 и три оценки коэффициентов регрессии при линейных членах
b1, b2, b3 (из четырех опытов нельзя получить более четырех оценок коэффициентов регрессии).
Таблица 1.2
| n | X0 | X1 | X2 | X3 | X1 X2 | X1 X3 | X2 X3 | X1X2X3 |
| +1 | -1 | -1 | +1 | +1 | -1 | -1 | +1 | |
| +1 | +1 | -1 | -1 | -1 | -1 | +1 | +1 | |
| +1 | -1 | +1 | -1 | -1 | +1 | -1 | +1 | |
| +1 | +1 | +1 | +1 | +1 | +1 | +1 | +1 |
Применение ДФЭ всегда связано со смешиванием, т.е. с совместным оцениванием нескольких теоретических коэффициентов математической модели. В рассматриваемом случае каждый из найденных коэффициентов b1 включает в себя оценки двух теоретических коэффициентов регрессии:
b0®b0+b123; b1®b1+b23; b2®b2+b13; b3®b3+b12;
Действительно, указанные теоретические коэффициенты в таком планировании не могут быть найдены раздельно, поскольку столбцы МП для линейных членов и парных произведений совпадают (полностью коррелированы). Рассмотренный план ДФЭ представляет половину плана ПФЭ типа 2 3 и называется полурепликой от ПФЭ типа 2 3 или планом типа N = 23-1 (табл. 1.2).
При большом числе k факторов для получения линейного приближения можно построить дробные реплики более высокой степени дробности. Так, при k= 5 можно составить дробную реплику (четвертьреплику) на основе ПФЭ типа 2 3, приравняв два из пяти факторов к взаимодействиям трех других факторов: парному и тройному. Будем обозначать тип дробной реплики записью 2 k-p, если р факторов приравнены к произведениям остальных k - р факторов. Дробность реплики при этом равна
1/2p.
При планировании ДФЭ недопустимо произвольное разбиение ПФЭ на части. Для правильного планирования ДФЭ необходимо использовать все имеющиеся сведения теоретического и интуитивного характера об объекте и выделить те факторы и произведения факторов, влияние которых на отклик существенно. При этом смешивание нужно производить так, чтобы линейные коэффициенты b0, b1, …, bk были смешаны с коэффициентами при взаимодействиях самого высокого порядка (так как обычно они в модели отсутствуют) или при тех взаимодействиях, о которых априори известно, что они не оказывают влияния на отклик.
Для построения плана ДФЭ типа 2 k-p выбирается k - р факторов и для них строится ПФП. Значения оставшихся p факторов определяются приравниванием их различным взаимодействиям (парным, тройным и т.д.) предшествующих факторов. Эти выражения называются генерирующими соотношениями. Так, в рассмотренном выше примере при построении полуреплики типа 2 3-1 переменная x была задана генерирующим соотношением х3 = х1 х2.
Умножив обе части генерирующего соотношения на переменную, для задания которой оно использовалось, получим выражение, называемое определяющим контрастом (1 = х 1 х 2 х 3 , так как всегда х 1 х 1 = 1 ). Совокупность всех определяющих контрастов, а также их произведений составляет обобщающий определяющий контраст (ООК).
Значение ООК позволяет для всех факторов определить, с какими эффектами взаимодействия смешаны их линейные эффекты. Перемножив поочередно каждый из независимых факторов на ООК, получим x1=x2x3, x2=x1x3, x3=x1x2. Собственно сам ООК задает систему смешивания для центра плана x0=x1x2x3.
Отсюда легко находятся смешиваемые теоретические коэффициенты регрессии и их оценки:
b0®b0+b123; b1®b1+b23; b2®b2+b13; b3®b3+b12;
Если априори можно принять, что коэффициенты при всех парных и тройном взаимодействиях равны нулю, то реализация этой полуреплики позволит получить раздельные оценки всех четырех линейных коэффициентов регрессии.
Для четвертьреплики в пятифакторном планировании типа 25-2 должны быть заданы два генерирующих соотношения, например:
x4=x1x2x3, x5=x1x2,
причем полагаем b123= 0, т.е. x1,x2,x3 все вместе не взаимодействуют и b12= 0 , т.е. x1,x2 также не взаимодействуют. Определяющие контрасты для этой реплики согласно приведенным выше правилам имеют вид
1=x1x2x3x4, 1=x1x2x5
Обобщающий определяющий контраст, построенный на основе всех полученных определяющих контрастов и их произведений, полностью характеризует разрешающую способность реплик высокой степени дробности. Так, в данном случае ООК имеет вид
1= x1x2x3x4= x1x2x5=x3x4x5.
Совместные оценки здесь определяются вспомогательными соотношениями
x0=x1x2x3x4=x1x2x5=x3x4x5;
x1=x2x3x4=x2x5=x1x3x4x5;
x2=x1x3x4=x1x5=x2x3x4x5;
x1x3=x2x4=x2x3x4=x1x4x5;
x3=x1x2x4=x1x2x3x5=x4x5;
x4=x1x2x3=x1x2x4x5=x3x5;
x5=x1x2x3x4x5=x1x2=x3x4;
Эти вспомогательные соотношения позволяют установить, какие столбцы МП окажутся линейно зависимыми и, следовательно, совместной оценкой каких теоретических коэффициентов является тот или иной выборочный коэффициент регрессии:
b0®b0+b1234+b125+b345;
b1®b1+b234+b25+b1345;
b2®b2+b134+b15+b2345;
b3®b3+b124+b1235+b45;
b4®b4+b123+b1245+b35;
b5®b5+b12345+b12+b34;
b13®b13+b24+b235+b145;
b14®b14+b23+b245+b135;
Разрешающая способность этой четвертьреплики невысокая и равна трем, так как все теоретические линейные коэффициенты регрессии смешаны с коэффициентами при парных взаимодействиях. Следует иметь в виду, что план ДФЭ всегда можно дополнить до плана ПФЭ недостающими дробными репликами. В данном примере для остальных трех четвертьреплик генерирующие соотношения запишутся в виде
x4=x1x2x3;
x5=-x1x2;
x4=-x1x2x3;
x5=x1x2;
x4=-x1x2x3;
x5=-x1x2;
а обобщающие определяющие соотношения — в виде
1=x1x2x3x4=-x1x2x5=-x3x4x5;
1=-x1x2x3x4=-x1x2x5=-x3x4x5;
1=-x1x2x3x4=-x1x2x5=x3x4x5;
Осуществление этих дополняющих четвертьреплик означает реализацию ПФЭ в целом и, следовательно, раздельное оценивание всех теоретических коэффициентов регрессии.
С учетом свойств матрицы планирования формулы для вычисления оценок коэффициентов регрессии bj и bj1 принимают вид
 ;
;  ;
;  ; j,l=1,..,k, j¹l (1.6)
; j,l=1,..,k, j¹l (1.6)
Поскольку они определяются по результатам эксперимента (случайные величины), то и значения их также случайны, т.е. определяются с погрешностями. Может случиться, что абсолютная величина некоторых коэффициентов приблизительно равна погрешностям их определения или даже меньше. Такие коэффициенты считаются незначимыми. Физически незначимость коэффициента по какому-либо фактору хj означает, что приращение целевой функции, вызванное изменением фактора хj, соизмеримо с погрешностями измерения целевой функции.
Для ортогональных планов ПФЭ и ДФЭ дисперсии коэффициентов регрессии равны между собой и определяются следующим образом:
sbj2=sbjl2=Dвос/N,
где Dвос - s2{у} — дисперсия воспроизводимости, характеризующая
ошибку наблюдений. Для ее определения в одной из точек плана (обычно в центре) производится q независимых наблюдений выходной переменной у. Оценка Dвос будет
 ;
; 
где у 0j — значение выходной переменной в i-м наблюдении.
Проверка значимости коэффициентов b j состоит в проверке статистической гипотезы H0: bj = 0 . С этой целью используется статистика
U j=bj/sbj , подчиненная t-распределению Стьюдента c nвос =q -1 числом степеней свободы. Если вычисленное значение ½U j½< ta, то гипотеза принимается и коэффициент bj незначим. Значение ta берется из таблицы t-распределения (приложение 2) при заданном уровне значимости a.
Аналогично может быть проверена значимость коэффициентов регрессии bjl.
Статистическая незначимость оценки коэффициента регрессии может быть обусловлена следующими причинами:
— данный j-й фактор не имеет функциональной связи с откликом, т.е. bj = 0 ;
— уровень хj0 базового режима x0 находится в точке частного экстремума функции отклика по фактору xj и тогда
bj=¶y/¶xj=0;
— интервал варьирования Dxj выбран малым;
— вследствие влияния неуправляемых и неконтролируемых факторов велика ошибка воспроизводимости эксперимента.
Если значимы все коэффициенты регрессии, полученная модель может быть использована для исследования системы.
Если часть коэффициентов регрессии значима, а часть незначима, то можно провести дополнительную серию опытов с тем же центром плана (или с его переносом) и новыми интервалами варьирования по незначимым факторам.
Возможны другие способы получения значимых коэффициентов — увеличение числа параллельных опытов и достройка плана путем перехода к реплике меньшей дробности.
Если все коэффициенты незначимы, следует увеличить интервалы варьирования Dхj ( j=1,k) по всем факторам.
Следует отметить, что найденные по формулам (1.6) параметры модели могут быть использованы только при подстановке в модель (1.4) нормированных значений переменных (1.5). Для получения линейной регрессионной модели, использующей значения входных переменных в натуральных единицах, необходимо произвести пересчет коэффициентов модели по формулам
 ;
;  ; j=1,..,k
; j=1,..,k
где b — коэффициенты модели в нормированной системе координат; а — коэффициенты модели в абсолютной системе координат.
Для модели первого порядка с парными взаимодействиями формулы пересчета коэффициентов имеют вид
 ;
;
 , i=1..k;
, i=1..k;
 , i,j=1..k, i>j
, i,j=1..k, i>j
Для проверки гипотезы об адекватности математического описания опытным данным достаточно оценить отклонение предсказаний по полученному уравнению регрессии величины отклика уMi от результатов наблюдений yi в одних и тех же i -x точках факторного пространства. Рассеяние результатов наблюдений вблизи уравнения регрессии, оценивающего истинную функцию отклика, можно охарактеризовать с помощью дисперсии адекватности
 ,
,
где (k + 1) — число членов аппроксимирующего полинома. Дисперсия адекватности определяется с числом степеней свободы nад=N-(k+1).
Проверка гипотезы об адекватности состоит, по сути дела, в сопоставлении дисперсии адекватности D ад с оценкой дисперсии воспроизводимости отклика Dвос. Если эти оценки дисперсий однородны, то математическое описание адекватно представляет результаты опыта, если же нет, то описание считается неадекватным. Проверку гипотезы об адекватности производят с использованием F -критерия Фишера, который характеризуется отношением
F=Dад/Dвос.
Если найденное эмпирически значение критерия F меньше критического Fкр, найденного из приложения 1 для соответствующих степеней свободы числителя vад = N - (k+l) и vвос= q-1 знаменателя при заданном уровне значимости a, то гипотезу об адекватности принимают. В противном случае гипотезу отвергают и математическое описание признается неадекватным.
Проверка адекватности возможна только при числе степеней свободы nад и nвос больше нуля. Если число N вариантов варьирования плана ПФЭ равно числу оценок коэффициентов регрессии N = k + 1 , то для проверки гипотезы об адекватности математического описания степеней свободы не остается (naд =0). Если же некоторые оценки коэффициентов регрессии оказались незначимыми, то число членов проверяемого уравнения в этом случае меньше числа N вариантов варьирования N > k + 1 и для проверки гипотезы об адекватности останется одна или несколько степеней свободы (nад > 0). Однако в этом случае необходимо исключить незначимые коэффициенты bj из уравнения регрессии и пересчитать величину Dад.
Если гипотеза об адекватности отвергается, необходимо переходить к более сложной форме математического описания либо, если это возможно, проводить эксперимент с меньшим интервалом варьирования D xj. Следует отметить, что максимальная величина интервала варьирования определяется условием адекватного описания объекта в области варьирования. Если при больших интервалах варьирования математическая модель неадекватна, то возникают систематические ошибки в определении коэффициентов, для уменьшения которых следует сузить область варьирования. Однако с уменьшением интервала варьирования появляется целый рад новых трудностей: растет отношение помехи к полезному сигналу, что приводит к необходимости увеличения числа параллельных опытов для выделения полезного сигнала на фоне шума, иначе оценки коэффициентов могут стать статистически незначимыми.
Если линейная модель неадекватна, то необходимо оценить значимость влияния квадратичных членов уравнения (1.1) на выходную переменную. С этой целью используется статистика
 ,
,
подчиненная t - распределению Стьюдента с числом степеней свободы nboc = q - 1 .Если U < ta , найденного из приложения 2 при заданном уровне значимости a, то влияние факторов хj2 незначимо и им можно пренебречь. В противном случае нужно переходить к уравнению регрессии более высокого порядка.
Варианты задания области изменения факторов и значимых взаимодействий представлены в табл. 1.3.
Таблица 1.3
| Номер варианта | Границы области допустимых значений факторов | Значимые взаимодействия | ||||
| Х1 | Х2 | Х3 | Х4 | Х5 | ||
| 0;30 | -10;40 | 0;70 | -50;20 | -15;15 | x1x3, x1x4 | |
| 40;100 | 25;45 | -10;80 | 20;100 | 25;65 | x1x3, x1x5 | |
| 10;70 | 10;80 | -15;65 | 50;90 | 40;100 | x2x3, x3x4 | |
| 40;90 | -20;20 | 10;60 | 50;100 | -15;45 | x1x4, x1x5 | |
| 20;60 | 0;60 | -15;75 | 0;40 | 10;60 | x1x4, x3x4 | |
| 10;60 | -15;75 | 40;90 | 50;80 | 0;100 | x1x3, x2x3 | |
| 45;85 | 40;120 | 30;100 | 20;70 | 50;120 | x1x3, x3x4 | |
| 50;125 | -20;50 | 20;80 | 40;90 | 30;80 | x2x4, x2x5 |
Для проведения эксперимента и получения значений функции отклика в заданных точках плана используется стандартная программа BLACKBOX, входящая в состав математического обеспечения кафедры. Способы обращения к программе и организации ввода данных представляются преподавателем.
Содержание отчета
Отчет должен содержать:
— задание;
— матрицы планирования эксперимента, составленные из кодированных и реальных значений входных переменных;
— результаты эксперимента;
— результаты расчетов оценок коэффициентов регрессий и дисперсий;
— результаты проверки значимости коэффициентов и адекватности модели;
— выводы по работе.
Контрольные вопросы
1. Каким образом формируется матрица планирования при ПФЭ?
2. Какими свойствами обладает матрица планирования?
3. Как осуществляется выбор интервала варьирования? Его допустимые максимальные и минимальные значения.
4. Дробные реплики. Значение реплик и составление для них матриц планирования.
5. Почему желательна симметрия уравнений регрессии относительно коэффициентов?
6. Каково допустимое минимальное число экспериментов при заданном числе факторов?
7. Полуреплики 2 4-1 заданы: одна — определяющим контрастом 1=x1x2x3x4, другая — генерирующим соотношением х 4 = - x1 х2 . Какая из этих полуреплик обладает большей разрешающей способностью?
8. Матрица планирования (ДФЭтипа25-1) задана генерирующими соотношениями x4=-x1x3; x5=x1x3x2. Найти систему смешивания основных факторов.
9. Как проверить значимость оценок коэффициентов регрессии?
10. При каких условиях оценки коэффициентов регрессии незначимы и как эти условия устранить?
11. Как проверить адекватность модели?
Работа 2 МЕТОД КРУТОГО ВОСХОЖДЕНИЯ (МЕТОД БОКСА — УИЛСОНА)
Цель работы — знакомство с методом планирования экспериментов, предназначенных для поиска условий, которые обеспечивают экстремум функции отклика.
Порядок выполнения работы
Работу следует выполнять в таком порядке: 1. Для построенной линейной регрессионной модели рассчитать шаги движения по… 2. Построить в натуральных единицах план эксперимента, реализующий движение по градиенту.Общие сведения
Метод крутого восхождения основан на использовании движения по градиенту в сторону возрастания выходной переменной у .
Напомним, что вектор-градиент в k-факторном пространстве определяется соотношением
 ,
,
где  (i=1..k) — единичные направляющие векторы (орты), расположенные вдоль факторных осей; д у / д х i — частная производная целевой функции по i-му фактору.
(i=1..k) — единичные направляющие векторы (орты), расположенные вдоль факторных осей; д у / д х i — частная производная целевой функции по i-му фактору.
Для линейной регрессионной модели вида у = b0 + blxl + ...+ bkxk коэффициенты bj являются компонентами вектора-градиента.
Таким образом, если коэффициент регрессии bj умножить на интервал варьирования фактора Dхi, то будет определено приращение координаты xi точки, лежащей на градиенте. Это положение для двумерного случая иллюстрируется на рис.2.1.
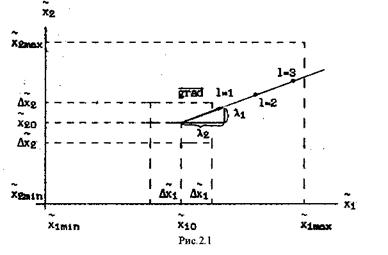
Расчет движения по градиенту осуществляется таким образом, чтобы от центра плана до границ области в направлении градиента получилось 8-10 шагов. Для этого необходимо :
а) определить составляющие градиента в реальном масштабе
lI=biDxi~, i=1,k
б) вычислить число шагов по каждой из переменных в сторону возрастания функции от центра плана хio до границы области xi~Г в направлении движения хi~ min или хi~ max:

где t — масштабный коэффициент (первоначально t = 1 );
в) определить минимальное число шагов в направлении градиента в допустимой области п= minni. Если оно неудовлетворительно, то масштабный коэффициент t необходимо скорректировать таким образом, чтобы получить число п в желаемом интервале (8-10);
г) величину шага по выбранной в п.«в» 7-й переменной принять за базовую lб а з = lItкон;
д) определить величину шага по всем переменным, обеспечивающую движение по градиенту в реальном масштабе:
 , i=1..k;
, i=1..k;
е) определить координаты точек на i- м шаге в направлении градиента
 , l=1,2,…,
, l=1,2,…,
и провести в них «мысленные» (по модели) и проверочные (реальные) опыты.
«Мысленные» опыты заключаются в получении предсказанных (расчетных) значений отклика у м по полученному линейному уравнению регрессии. Они позволяют: 1) сокращать объем реальных опытов; 2) получить представление о том, насколько хорошо регрессионные уравнения аппроксимируют реальную поверхность отклика, т.е. насколько расчетные значения у м отличаются от значений y, наблюдавшихся в реальных опытах.
Проделывая эксперименты в каждой точке (с выбранным шагом), построим зависимость функции отклика от номера шага (рис.2.2).

Найденная в результате движения по градиенту экстремальная точка принимается в качестве исходной (центр плана) для построения нового плана эксперимента.
Вокруг нее снова формируется ПФП (ДФП), проводится эксперимент, строится линейная модель, определяется новое направление движения в направлении градиента и повторяются все действия, обеспечивающие движение в область экстремума функции отклика.
Для организации движения по градиенту можно также использовать методы оптимизации функции одной переменной (методы дихотомии, «золотого сечения», чисел Фибоначчи и др.).
Поисковое рабочее движение прекращают по достижении области экстремума. Признаком достижения экстремума является статистическая незначимость оценок b i коэффициентов линейной регрессии, вычисленных по результатам ПФЭ (ДФЭ) вокруг очередной нулевой точки, либо выход на границу области допустимых значений факторов.
Содержание отчета
Отчет должен содержать:
—задание;
— матрицы планирования эксперимента;
— результаты эксперимента, оформленные в виде таблицы;
— график изменения функции отклика при движении по градиенту;
— выводы по работе.
Контрольные вопросы
1. В чем заключается процедура метода крутого восхождения?
2. В чем состоит роль мысленных опытов и как они проводятся?
3. Каким образом методом крутого восхождения можно исследовать поверхность с несколькими экстремумами?
4. Как определить расчетные составляющие рабочих шагов в реальном масштабе в направлении градиента?
5. Когда заканчивается поисковое рабочее движение к области экстремума функции отклика?
Работа 3. ПЛАНИРОВАНИЕ ВТОРОГО ПОРЯДКА.
ОРТОГОНАЛЬНОЕ ЦЕНТРАЛЬНОЕ КОМПОЗИЦИОННОЕ
ПЛАНИРОВАНИЕ
Цель работы — изучение методов планирования эксперимента для получения математического описания системы в виде полинома второго порядка и использование этого описания для определения координат оптимума функции отклика.
Порядок выполнения работы
Работу следует выполнять в таком порядке: 1. Оформить план эксперимента. 2. Для заданной преподавателем модели исследуемого объекта («черного ящика») провести на ЭВМ эксперименты в…Общие сведения
Пусть имеется сложная система. При исследовании целевой функции у в области экстремума (стационарной области) модель первого порядка является уже недостаточной. Более подходящей моделью для аппроксимации локального участка функции отклика является регрессионная модель второго порядка
M{y}=b0+åbjxj+åbjlxjxl+åbjjxj2, j,l=1..k, l<j (3.1)
где b0,bj,bjl ,bjj — коэффициенты регрессии.
Планы проведения эксперимента, необходимого для построения модели второго порядка, отличаются от линейных планов тем, что факторы варьируются на нескольких (минимум на трех) уровнях. В связи с этим на практике используются центральные композиционные планы (ЦКП), состоящие из трех блоков, включающих:
1) ядро плана — точки Nф= 2k полного или дробного факторного эксперимента Nф = 2 k-p
2) «звездные» точки N а = 2 k ;
3) нулевые (центральные) точки N 0.
Общее число N точек ЦКП N = N ф + N а + N 0 .
При построении планов используют различные критерии оптимальности планирования. Наиболее широко применяются ортогональные, ротатабельные и D-оптимальные планы.
При ортогональном планировании коэффициенты уравнения регрессии оцениваются независимо с минимальными дисперсиями. Причем факторы с незначимыми коэффициентами можно сразу отбрасывать, без пересчета оставшихся значимых коэффициентов, как это необходимо делать при неортогональных планах.
Ротатабельные планы позволяют получать уравнения регрессии, предсказывающие значения функции отклика с одинаковой точностью во всех направлениях на одинаковом расстоянии от центра плана.
Точность оценивания коэффициентов регрессии характеризуется эллипсоидом рассеивания их оценок. Планирование, при котором требуется, чтобы объем эллипсоида рассеяния оценок коэффициентов был минимальным, называется D-оптимальным.
В настоящей работе рассматривается ортогональное центральное композиционное планирование (ОЦКП). Критерием оптимальности плана является ортогональность столбцов матрицы планирования. В силу ортогональности планирования все оценки коэффициентов являются независимыми друг от друга.
При ОЦКП к ядру N ф плана добавляют 2 k звездных точек с координатами, включающими звездное плечо (так, при k= 2 добавляются четыре точки с координатами (±а,0),(0,±а), которые изображены на рис.3.1), и одна точка в центре плана.

Значения входных переменных, соответствующие композиционному плану второго порядка при k = 3, приведены в табл.3.1.
Таблица 3.1
| Номер опыта | Х1 | Х2 | Х3 | Примечания |
| -1 | -1 | -1 | Полный факторный план Nф | |
| +1 | -1 | -1 | ||
| -1 | +1 | -1 | ||
| +1 | +1 | -1 | ||
| -1 | -1 | +1 | ||
| +1 | -1 | +1 | ||
| -1 | +1 | +1 | ||
| +1 | +1 | +1 | ||
| +a | Звездные точки Na | |||
| -a | ||||
| +a | ||||
| -a | ||||
| +a | ||||
| -a | ||||
| Центр плана N0 |
Величина a выбирается так, чтобы обеспечить ортогональность получаемого плана. В табл.3.2 приведены параметры ортогональных центральных композиционных планов для разного числа входных переменных.
Таблица 3.2
| Размерность | Ядро плана | N | a | b | C0 | C1 | C2 | C3 |
| 22 | 0,6667 | 0,1111 | 0,1667 | 0,5 | 0,25 | |||
| 23 | 1,215 | 0,73 | 0,0667 | 0,0913 | 0,229 | 0,1250 | ||
| 24 | 1,414 | 0,8 | 0,04 | 0,05 | 0,125 | 0,0625 | ||
| 25-1 | 1,547 | 0,77 | 0,0370 | 0,0481 | 0,087 | 0,0625 | ||
| 26-1 | 1,722 | 0,843 | 0,222 | 0,0264 | 0,056 | 0,0312 | ||
| 27-1 | 1,885 | 0,9 | 0,0127 | 0,0141 | 0,038 | 0,0156 | ||
| 28-1 | 2,001 | 0,8898 | 0,0123 | 0,0139 | 0,031 | 0,0156 |
Формулы для расчета оценок коэффициентов уравнения регрессии имеют вид

 , 1 £ i £ k;
, 1 £ i £ k;
 , 1 £ i £ k;
, 1 £ i £ k;
(3.2)
 , 1 £ i , l £ k, i<1;
, 1 £ i , l £ k, i<1;
 .
.
Оценки дисперсий коэффициентов модели определяются по формулам

где D вос — оценка дисперсий ошибок наблюдений (дисперсия воспроизводимости), для определения которой необходимо произвести q дополнительных наблюдений в выбранной точке (например, в центре плана):
 , (3.3)
, (3.3)
где  — среднее значение выходной переменной, вычисленное по результатам этих наблюдений.
— среднее значение выходной переменной, вычисленное по результатам этих наблюдений.
Проверка значимости коэффициентов регрессии проводится по t -критерию по изложенной в работе 1 методике с v = q - 1 степенями свободы:
Если какое-либо неравенство выполняется, то соответствующий коэффициент значим.
Найденные по формулам (3.1) параметры модели могут быть использованы только при подстановке в модель нормированных значений переменных (1.5). Для получения регрессионной модели вида (3.1), использующей значения входных переменных в натуральных единицах, необходимо произвести пересчет коэффициентов модели по формулам

где b — оценки коэффициентов модели в нормированной системе координат; а — оценки коэффициентов модели в абсолютной системе координат. Проверка адекватности модели проводится с помощью F-критерия Фишера:
F=Dад/Dвос
где Dад — дисперсия адекватности, определяющая рассогласование результатов эксперимента у i со значениями выходной переменной уi м, вычисленными по модели:
 , (3.4)
, (3.4)
где d—число коэффициентов модели.
Если F < FKp при заданном уровне значимости для числа степеней свободы числителя .vaд = N-d и vвос =q-l знаменателя, то гипотеза об адекватном описании объекта принимается.
Если модель неадекватна, то следует изменить интервалы варьирования переменных. Если и это не приводит к желаемым результатам, необходимо переходить к построению модели более высокого порядка.
Если полученная модель адекватна, то она используется для анализа поверхности отклика и поиска положения точки оптимума. Для определения координат экстремальной точки необходимо либо приравнять нулю первые частные производные полученного уравнения регрессии и решить данную систему линейных уравнений, либо воспользоваться имеющимися стандартными численными методами оптимизации функции многих переменных, используя уравнение регрессии в качестве целевой функции. Если найденная экстремальная точка находится в допустимой области, то в ней необходимо провести дополнительный эксперимент и сопоставить полученные результаты с величиной, вычисленной в этой же точке по модели, а также со значением функции отклика в центре плана.
Содержание отчета
Отчет должен содержать:
— задание;
— план эксперимента;
— полученную нелинейную модель;
— результаты проверки на значимость;
— результаты проверки на адекватность;
— результаты поиска экстремума с использованием модели;
— выводы по работе.
Контрольные вопросы
1. В каких случаях используется план второго порядка?
2. Как достигается ортогональность матрицы планирования при
ОЦКП?
3. Как определяются координаты звездных точек?
4. Как определяется общее количество опытов в ОЦКП?
5. Каким образом осуществляется преобразование переменных в
ОЦКП?
6. Каким образом проверяется значимость коэффициентов модели?
7. Как проверить адекватность модели?
Работа 4. РОТАТАБЕЛЬНОЕ ЦЕНТРАЛЬНОЕ КОМПОЗИЦИОННОЕ ПЛАНИРОВАНИЕ
Цель работы — ознакомление с методом ротатабельного композиционного планирования и изучение особенностей его применения в экстремальных экспериментах.
Порядок выполнения работы
Работу следует выполнять в таком порядке: 1. Сформировать план эксперимента. 2. Для заданной преподавателем модели исследуемого объекта («черного ящика») провести на ЭВМ эксперименты в…Общие сведения
Пусть имеется сложная система управления. Для аппроксимации локального участка функции отклика и исследования целевой функции у в области экстремума (стационарной области) используется регрессионная модель второго порядка вида (3.1).
Задача состоит в том, чтобы по результатам эксперимента, проведенного в соответствии с ротатабельными композиционными планами, найти оценки коэффициентов уравнения регрессии к на основе полученного описания системы предсказать оптимальные значения управляемых переменных (как отмечалось ранее, ротатабельные планы позволяют получать уравнения регрессии, предсказывающие значения функции отклика с одинаковой точностью во всех направлениях на одинаковом расстоянии от центра плана). Ротатабельный центральный композиционный план для математической модели второго порядка может быть получен путем добавления к N ф точек ядра плана N а звездных точек с координатами (± а,0,...,0),...,(0,...,0,± а),а также Nо точек в центре плана.
Величина плеча а для ротатабельного плана второго порядка вычисляется по формуле
A=2(k-p)/4
Число опытов Nо в центре плана выбирается из следующих соображений. Выдвигается требование, чтобы информация о значении выходной переменной оставалась неизменной для точек внутри сферы единичного радиуса с центром в центре плана. Иными словами, требуется, чтобы информационный профиль ротатабельного плана мало изменялся при значениях радиуса от 0 до 1. Планы, удовлетворяющие этому условию, называются ротабельными униформ-планами.
Униформ-план можно получить, меняя число точек в центре композиционного плана второго порядка. В табл.4.1 приведены значения плеча а ,числа точек в центре плана N о, звездных точек N а и общего числа точек N для ротатабельных униформ-планов второго порядка.
Таблица 4.1
| Размерность | Ядро плана | Nф | Na | No | N | a |
| 22 | 1,414 | |||||
| 23 | 1,682 | |||||
| 24 | 2,000 | |||||
| 25 | 2,378 | |||||
| 25-1 | 2,000 | |||||
| 26 | 2,828 | |||||
| 26-1 | 2,378 | |||||
| 27 | 3,333 | |||||
| 27-1 | 2,828 |
Формулы для расчета оценок коэффициентов уравнения регрессии в нормированной системе координат имеют вид

 ;
;



где


В формулах значения xij, xlj берутся из матрицы ротатабельногс планирования.
Оценки коэффициентов bi и bil получаются не зависимыми друг oт друга, а оценки коэффициентов b0 и bii коррелированы между собой,
Оценки дисперсии оценок коэффициентов регрессии определяются по формулам



Оценка значимости коэффициентов регрессии проводится по t - критерию по изложенной в работе 1 методике с v = q - 1 степенями свободы. Ширина доверительных интервалов для коэффициентов регрессии
Db= ±(tasb).
Значение ta. находится из таблиц (приложение 2) исходя из заданного уровня значимости а и числа степеней свободы дисперсии воспроизводимости D вос. Значимость коэффициентов регрессии проверяется сравнением доверительных интервалов с абсолютной величиной коэффициентов регрессии.
Проверка адекватности модели проводится с помощью F-критерия
Фишера:
F=Dад/Dвос
где D ад — дисперсия адекватности, определяющая рассогласование результатов эксперимента уi со значениями выходной переменной уi; , вычисленными из модели (3.4); D вос — оценка дисперсии ошибок наблюдений (дисперсия воспроизводимости) (3.3).
Если F < Fкр при заданном уровне значимости для числа степеней свободы числителя vaд = N-d и vвос =q-l знаменателя, то гипотеза об адекватности модели принимается.
В случае адекватности модели она используется для анализа поверхности отклика и поиска положения точки оптимума. В противном случае следует изменить интервалы варьирования переменных или перейти к построению модели более высокого порядка.
Пересчет коэффициентов модели для использования значения входных переменных в натуральных единицах производится по формулам, используемым в работе 3.
Содержание отчета
Отчет должен содержать:
— задание;
— план эксперимента;
— полученную нелинейную модель;
— результаты проверки на значимость;
— результаты проверки на адекватность;
— результаты поиска экстремума с использованием модели;
— выводы по работе.
Контрольные вопросы
1. Какое планирование называется ротатабельным?
2. Какие планы эксперимента используются при ротатабельном планировании второго порядка?
3. Как определяется величина плеча а в ротатабельном планировании?
4. Что означает понятие «информационный профиль» плана?
5. Чем определяется в ротатабельном планировании число центральных точек N0?
6. Какой критерий оптимальности плана применяется в ротатабельном планировании?
7. Когда применяется ротатабельное композиционное планирование?
8. Чем отличается дробный факторный эксперимент от ротатабельного планирования?
9. Как переводится уравнение для нормированных величин в уравнение для физических величин?
Работа 5. ПОСТРОЕНИЕ D - ОПТИМАЛЬНЫХ ПЛАНОВ
Цель работы — изучение численных методов построения D- оптимальных планов и получение практических навыков их использования.
Порядок выполнения работы
Работу следует выполнять в таком порядке : 1. Для модели объекта, заданной пользователем, построить непрерывный… — определить точки спектра непрерывного D-оптимального плана;Общие сведения
При построении по экспериментальным данным математических моделей исследуемых объектов, описываемых уравнением вида
y=bTf(x) (5.1)
где f(х) — заданные функции: f(x)={f0(x), f1(x),…,fd(x)}T ; d — число параметров уравнения (5. 1); х = {х1 , х2 ,…, хk } — вектор независимых управляемых переменных (факторов), обычно требуется составить программу проведения эксперимента, удовлетворяющую условиям выполнения некоторого критерия оптимальности. В планировании эксперимента широко используется критерий D-оптимальности, позволяющий охватить широкий круг экспериментальных задач: нелинейных, последовательного планирования, с произвольной областью варьирования независимых переменных, с неодинаковой точностью опытов при различных условиях проведения эксперимента.
Пусть задан точный план эксперимента
x={x(1), x(2),…,x(N)}T
где x(i)- i-я точка факторного пространства: x(i)=(x1(i), x2(i),…, xk(i)); N — число точек плана.
Матрица значений функций независимых переменных в точках плана имеет вид
 .
.
Так как часть точек плана может повториться, то его можно представить в виде
 ,
,
где x(j) — точки, в которых сосредоточен план X, j = 1 ,r (спектр плана); hj — число повторных наблюдений в j -й точке плана, причем

Обозначим lj=hj/N— частота j -й точки плана. Тогда соответствующий ему план, заданный в виде

называется нормированным планом. Если частоты lj могут принимать любые значения в интервале [0,1] при условии ålj== 1, то план L называется непрерывным.
Например, если для двух переменных х1, х2 точный план
 -1 -1
-1 -1
+1 -1
-1 +1
Х= -1 +1
0 0
0 0
то с учетом кратности последних точек соответствующий ему непрерывный план будет
 |
x(1), x(2), x(3), x(4), x(5)
L=
1/6, 1/6, 1/6, 1/6, 2/6,
Критерий D-оптимальности требует такого выбора плана X *, содержащего N опытов, при котором определитель дисперсионной матрицы С (X ) минимален т.е.
½С (X* )½=min½С (X)½=min½(FTF)-1½ xÎWx
или, соответственно, максимален определитель информационной матрицы М(Х):
½M (X* )½=max½M(X)½=max½FTF½ xÎWx
где X* — оптимальный план в смысле критерия D-оптимальности; Wх — область изменения параметров плана X.
План L * будет непрерывным D-оптимальным планом, если он минимизирует на множестве всех непрерывных планов в области Wx величину определителя дисперсионной матрицы или, соответственно, максимизирует определитель информационной матрицы М(Х).
Из теории планирования эксперимента известно, что в случае равноточных наблюдений процедура построения непрерывного D-оптимального плана сводится к выполнению рекуррентных операций, определяемых уравнениями
M(t+1)=M(t)+f(x*)fT(x*) (5.2)
fT(x*)C(t)f(x*)=max fT(x*)C(t)f(x*) (5.3)
где C(t)M(t) — дисперсионная и информационная матрицы соответственно на t -м шаге.
Для упрощения вычислений целесообразно разделить процедуры получения координат точек (спектра) D-оптимального плана и определения частот повторения. Выявление точек, в которых концентрируется D-оптимальный план, можно осуществить за сравнительно небольшое количество циклов по рекуррентным соотношениям (5.2), (5,3), тогда как точное определение частот в каждой точке требует большего числа циклов. Такое разбиение процедуры получения D-оптимальных планов обусловлено тем, что при определении частоты повторения наблюдений нет необходимости искать глобальный максимума f(x)t C(t)f(x} по всему пространству, так как заранее известно, что он будет иметь место в одной из точек, найденных на первом этапе.
Для получения спектра непрерывного D-оптимального плана следует провести следующие операции:
а) выбрать произвольный начальный невырожденный план для числа наблюдений Nо (r <=Nо:
 |
x(1), x(2),…, x(r)
L(0)=
l1, l2, …, lr
и определить информационную матрицу
M(0)=ålif(x(i))fT(xi)
б) по уравнению (5.3) определить точку х *, в которой квадратичная форма fт(x)С(0)f(х) имеет глобальный максимум на множестве Wх. Поиск глобального максимума может быть основан на многократном применении локального поиска из разных точек пространства Wх и последующем выборе максимального из всех значений локальных максимумов. Поиск локальных максимумов следует начинать с точек начального плана. Для обнаружения возможных максимумов, не предусмотренных начальным планом, локальный поиск следует осуществлять также из ряда случайных точек, координаты которых можно получить с помощью генератора случайных чисел, равномерно распределенных на области Wх;
в) после определения точки глобального максимума х * скорректировать матрицу L(0) по уравнению (5.2), т.е. получить план
 |
x(1) , x(2), …, x(r), x*
L(1)=
(l-a0)l1, (l-a0)l2, …, (l-a0)lr, a0
Операции «б», «в» повторить с заменой плана L(0) на L(1) и т.д. до выполнения останова в соответствии с выбранным правилом.
Практика показывает, что обычно можно производить останов по процедуре (5.2), (5.3), когда число циклов будет в два-три раза больше максимального числа точек, в которых концентрируется D-оптимальный план. В общем случае количество вычислений зависит от выбранных начальных приближений и будет тем меньше, чем ближе М(О) к информационной матрице D-оптимального плана.
Для определения частоты повторения наблюдений в каждой точке необходимо:
а) выбрать начальный план L(0), включающий по одному разу все точки, которые были определены на первом этапе:
|
x(1), x(2),…, x(r)
L(0)=
1/No, 1/No, 1/No
где No—число наблюдений (в начальном плане N 0 = r); r — число точек спектра D-оптимального плана;
б) на основании соотношения (5.3) определить точку x(i)* спектра плана, в которой квадратичная форма fт(х(i)*)C(0)f(x(i)*) (i=1 , r) больше, чем в остальных точках спектра. В том случае, когда получаются одинаковые наибольшие значения в нескольких точках спектра оптимального плана, выбирается любая из них;
в) скорректировать информационную матрицу М по уравнению (5.2), в результате чего получается план

где а0 = 1 / N и k — номер точки спектра, в которой добавляется еще одно наблюдение к плану L (0);
— операции «б»и«в» повторить с заменой плана L(0) на L(1) и числа наблюдений N 0 на N 1.
Другой подход к определению частот связан с подсчетом числа попаданий глобального максимума квадратичной формы fт(х(i)*)C(0)f(x(i)*) (i=1 , r) в каждую точку спектра х(i) D-оптимального плана:
li = (mi+l)/(N0 +S),
где т i — число попаданий в точку х(i)* спектра плана; S — число циклов на этапе определения частот.
Из процедуры построения непрерывных D-оптимальных планов видно, что вычислительные затраты на каждом шаге планирования складываются главным образом из времени, необходимого для поиска глобального максимума квадратичной формы, и времени обращения скорректированной информационной матрицы.
Дисперсионная матрица С (t + 1 ) на ( t + 1 )-м шаге рекуррентной процедуры может быть получена на основании известной после t-го этапа информационной матрицы по формуле
C(t+1)=[M(t)+f(x)fT(x)]-1
где х — точка, добавляемая в план L(t) .
Для упрощения вычислений можно воспользоваться известной формулой обращения матриц
 (5.4)
(5.4)
где А — квадратичная матрица размерности п х п; U — вектор-столбец размерности п .С учетом того что добавление точки в исходный план происходит c некоторым весом а , выражение (5.4) приводит к следующей формуле для определения элементов обратной матрицы С (t + 1) по известной матрице С(t):

Обозначим через Q (х , L ) функцию Q(x, L)=fT(x)C(L(t))f(x). Из теории планирования эксперимента известно, что непрерывный план L тогда и только тогда оптимален, когда
max Q(x , L) = k+1 ,
x Î Wx
где(k+ 1) — число оцениваемых параметров.
Это положение можно использовать для оценки относительного отличия получаемого плана L от D-оптимального с помощью формулы

С другой стороны, этой формулой можно воспользоваться для останова процедуры построения D-оптимального плана при достижении некоторого наперед заданного, достаточно малого положительного значения d.
Полученный непрерывный план может быть использован для построения точного D-оптимального плана при заданном числе опытов N. Решение данной задачи зависит от соотношений числа опытов в точном плане N и числа точек непрерывного плана r , а также от соотношений максимальной lmах и минимальной lmin частот точек непрерывного плана. При этом возможны следующие ситуации:
а) N = т r , l mах = l min и т — целое число. Так как l mах = l min , то
l1=l2=…=lr=1/r
Точный план, определяемый при этих условиях с помощью непрерывного D-оптимального плана, является D-оптимальным планом. Количество наблюдений в точке х(i) этого плана
hi=nli=N1/r=mr1/r=m
б) r <<N. В этом случае можно ожидать, что с помощью непрерывного плана получится точный план, достаточно близкий к D-оптимальному. Число наблюдений hi в точке х(i) определяется округлением произведения N1i до ближайшего целого числа;
в) k + 1 <= N <r. В этом случае трудно получить однозначное решение.
Варианты задания приведены в табл.5.1.
Таблица 5.1
| Номер бригады | Вид математической модели объекта |
| y=bo+b1x1+b2x12 | |
| y=bo+b1x1+b2x2 | |
| y=bo+b1x1+ b2x2+b12x1x2 | |
| y=bo+b1x1+ b2x2+b11x12 | |
| y=bo+b1x1+ b2x2+ b12x1x2+b11x12 | |
| y=bo+b1x1+ b2x2+ b12x1x2+b11x12+b22x22 | |
| y=bo+b11x12+b22x22 |
Построить D-оптимальные планы для расположения точек, представленного на рис.5.1.

Содержание отчета
Отчет должен содержать:
—задание;
— блок-схему процедуры вычисления непрерывного D-оптимального
плана; ооауг
— программу для вычисления D-оптимального плана на JBM;
— полученный непрерывный и точный D-оптимальные планы;
— выводы по работе.
Контрольные вопросы
1. Какой план называется D-оптимальным?
2 Чем отличается непрерывный план от точного?
3. Чем вызвано разбиение процедуры построения D-оптимального
плана на два этапа?
4. Как определяется глобальный максимум квадратичной формы fT(x)Cf(x)?
5. Исходя из каких условий выполняется останов вычислительных процедур каждого этапа построения D-оптимального плана?
6. Каким образом проверяется близость полученного плана к D-оптимальному?
7. Как получить на основе непрерывного точный D-оптимальный план?
Приложение 1
ЗНАЧЕНИЯ F-РАСПРЕДЕЛЕНИЯ ПРИ УРОВНЕ ЗНАЧИМОСТИ а = 0,05
| Значение v2 | Значение v1 | ||||||||
| ¥ | |||||||||
| 164.4 | 199.5 | 215.7 | 224.6 | 236.9 | 238.9 | 254.3 | |||
| 18.5 | 19.2 | 19.2 | 19.3 | 19.3 | 19.3 | 19.4 | 19.4 | 19.5 | |
| 10.1 | 9.6 | 9.3 | 9.1 | 9.0 | 8.9 | 8.5 | 8.5 | 8.5 | |
| 7.7 | 6.9 | 6.6 | 6.4 | 6.3 | 6.2 | 6.1 | 6.1 | 5.6 | |
| 6.6 | 5.8 | 5.4 | 5.2 | 5.1 | 5.0 | 4.9 | 4.9 | 4.3 | |
| 6.0 | 5.1 | 4.8 | 4.5 | 4.4 | 4.3 | 4.2 | 4.1 | 3.7 | |
| 5.5 | 4.7 | 4.4 | 4.1 | 4.0 | 3.9 | 3.8 | 3.7 | 3.2 | |
| 5.3 | 4.5 | 4.1 | 3.8 | 3.7 | 3.6 | 3.5 | 3.4 | 2.9 | |
| 5.1 | 4.3 | 3.9 | 3.6 | 3.5 | 3.4 | 2.3 | 3.2 | 2.7 | |
| 5.0 | 4.1 | 3.7 | 3.5 | 3.3 | 3.2 | 3.1 | 3.1 | 2.5 | |
| 4.8 | 4.0 | 3.6 | 3.4 | 3.2 | 3.1 | 3.0 | 3.0 | 2.4 | |
| 4.8 | 3.9 | 3.5 | 3.3 | 3.1 | 3.0 | 2.9 | 2.9 | 2.3 | |
| 4.7 | 3.8 | 3.4 | 3.2 | 3.0 | 2.9 | 2.8 | 2.8 | 2.2 | |
| 4.6 | 3.7 | 3.3 | 3.1 | 3.0 | 2.9 | 2.8 | 2.7 | 2.1 | |
| 4.5 | 3.7 | 3.3 | 3.1 | 2.9 | 2.8 | 2.7 | 2.6 | 2.1 | |
| 4.5 | 3.6 | 3.2 | 3.0 | 2.9 | 2.7 | 2.7 | 2.6 | 2.0 | |
| 4.5 | 3.6 | 3.2 | 3.0 | 2.8 | 2.7 | 2.6 | 2.5 | 2.0 | |
| 4.4 | 3.6 | 3.2 | 2.9 | 2.8 | 2.7 | 2.6 | 2.5 | 1.9 | |
| 4.4 | 3.5 | 3.1 | 2.9 | 2.7 | 2.6 | 2.5 | 2.5 | 1.9 | |
| 4.4 | 3.5 | 3.1 | 2.9 | 2.7 | 2.6 | 2.5 | 2.4 | 1.8 | |
| 4.3 | 3.4 | 3.1 | 2.8 | 2.7 | 2.6 | 2.5 | 2.4 | 1.8 | |
| 4.3 | 3.4 | 3.0 | 2.8 | 2.6 | 2.5 | 2.4 | 2.4 | 1.7 | |
| 4.2 | 3.4 | 3.0 | 2.7 | 2.6 | 2.5 | 2.4 | 2.3 | 1.7 | |
| 4.2 | 3.3 | 3.0 | 2.7 | 2.6 | 2.4 | 2.4 | 2.3 | 1.7 | |
| 4.2 | 3.3 | 2.9 | 2.7 | 2.5 | 2.4 | 2.3 | 2.3 | 1.6 | |
| 4.1 | 3.2 | 2.9 | 2.6 | 2.5 | 2.3 | 2.2 | 2.2 | 1.5 | |
| 4.0 | 3.2 | 2.8 | 2.5 | 2.4 | 2.3 | 2.2 | 2.1 | 1.4 | |
| 3.9 | 3.1 | 2.7 | 2.5 | 2.3 | 2.2 | 2.1 | 1.9 | 1.3 | |
| ¥ | 3.8 | 3.0 | 2.6 | 2.6 | 2.4 | 2.2 | 2.0 | 1.9 | 1.0 |
Приложение 2
ЗНАЧЕНИЕ f-РАСПРЕДЕЛЕНИЯ СТЬЮДЕНТА ПРИ УРОВНЕ ЗНАЧИМОСТИ а = 0,05
| Число степеней свободы | Значения t-распределения | Число степеней свободы | Значения t-распределения | Число степеней свободы | Значения t-распределения |
| 12.71 | 2.201 | 2.080 | |||
| 4.303 | 2.179 | 2.074 | |||
| 3.182 | 2.160 | 2.069 | |||
| 2.876 | 2.145 | 2.064 | |||
| 2.671 | 2.131 | 2.060 | |||
| 2.447 | 2.120 | 2.056 | |||
| 2.365 | 2.110 | 2.052 | |||
| 2.306 | 2.101 | 2.048 | |||
| 2.262 | 2.093 | 2.045 | |||
| 2.228 | 2.086 | 2.042 | |||
| ¥ | 1.960 |
ЛИТЕРАТУРА
1. Хартман К., Лецкий Э., Шефер В. Планирование эксперимента в исследовании технологических процессов. —М.: Мир, 1977.
2. Химмелъблау Д. Анализ процессов статистическими методами. — М.: Мир, 1973.
3. А.Г. Иваное, А.И, Павленко, О.И. Филиппов. Лабораторные работы по курсу «Планирования эксперимента и испытания АСУ». — М.: МАИ, 1981.
4. Зедгинидзе И.Г. Планирование эксперимента ддя исследования многокритериальных систем. — М.: Наука, 1976.
– Конец работы –
Используемые теги: работа, Планирование, ДРОБНОГО, факторного, эксперимента0.072
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Работа 1. ПЛАНИРОВАНИЕ ДРОБНОГО ФАКТОРНОГО ЭКСПЕРИМЕНТА
Что будем делать с полученным материалом:
Если этот материал оказался полезным для Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.155 сек.
Новости и инфо для студентов