рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Физика
- /
- Физические измерения
Реферат Курсовая Конспект
Физические измерения
Физические измерения - раздел Физика, 1. Статистическая Обработка Результатов Эксперимента ...
1. Статистическая обработка результатов
эксперимента
1.1. Физические измерения
В данной работе рассматривается классификация экспериментов и погрешностей, а также простейшие методы математической обработки результатов наблюдений.
Физическая величина – характеристика особенности физического объекта или явления, которая отображает его свойство, состояние или происходящий в нем процесс. Физические величины имеют количественное и качественное содержание.
Измерение – экспериментальное определение количественного значения физической величины с помощью специально предназначенных для этого технических средств. Измерение включает в себя наблюдение и математические операции для определения результата измерений.
Измерения подразделяются на прямые и косвенные.
Прямое измерение – это измерение, при котором искомое значение физической величины является показанием какого-либо прибора, например: длина – на шкале линейки, температура – на термометре, напряжение – на вольтметре и т.п.
Косвенное измерение – это измерение, при котором искомое значение получают вычислением на основании ее зависимостей от величин, измеряемых прямо, т.е. по формулам (ускорение, энергия и т.п.)
Количественно измерения подразделяются на одно- и многократные.
К однократным отнесем измерения, не только проводимые один раз, но и те значения физических величин, которые мы сами задаем в экспериментах, например, высоту, с которой опускаем груз, массу этого груза и т.п.
При многократных измерениях эксперименты повторяются несколько раз при одинаковых исходных состояниях (независимые наблюдения).
1.2. Погрешности физических измерений
В процессе измерений всегда присутствуют погрешности, т.е. отклонения результата наблюдения физической величины х от ее истинного значения хист.. Абсолютные погрешности Δх выражаются в единицах измеряемой величины и равны:
Δх = х – хист., (1.1)
а относительные – в процентах от значения измеряемой величины
 . (1.2)
. (1.2)
Погрешности подразделяют на три типа.
Систематическая погрешность при повторении одинаковых наблюдений остается постоянной или изменяется закономерным образом. Если природа и значение ее известны, такая погрешность может быть исключена из конечного результата введением соответствующей поправки (например, учет сдвига нуля шкалы прибора). Главной особенностью систематических погрешностей является возможность их оценки до проведения измерений.
Случайная погрешность проявляется в хаотическом изменении результатов повторных наблюдений вследствие беспорядочных воздействий весьма большого числа случайных факторов. Очевидно, что оценить величину случайной погрешности до проведения измерений невозможно.
Промах возникает в результате небрежности или ослабления внимания экспериментатора. Промахи легко выявить, поскольку соответствующие результаты заметно отличаются от остальных, например: не в том месте поставлена десятичная запятая при записи числа. Промахи должны быть исключены из ряда наблюдений.
1.3. Оценка величины систематической погрешности
Систематические погрешности являются следствием несовершенства приборов, а также недостатков методики измерения. В связи с этим рассматривают инструментальные погрешности, которые связаны с конструкцией измерительного прибора.
Одна из них своим происхождением имеет точность нанесения делений шкалы. В условиях лабораторного практикума эта погрешность всегда существенно меньше других, и в дальнейшем мы ее учитывать не будем.
Другой тип погрешности связан с принципом действия прибора и выражается в виде приведенной погрешности (класса точности). Классом точности называют относительную погрешность, приведенную к пределу измерений хпр.:
 . (1.3)
. (1.3)
Класс точности принимает значения 0,1; 0,2; 0,5; 1,0; 1,5; 2,5; 4,0. Обычно ими характеризуются электроизмерительные приборы. Абсолютная погрешность таких приборов постоянна по всей шкале для выбранного предела измерений, ее можно определить по формуле (1.3).
Очень часто при измерениях возникает необходимость оценки долей наименьшего деления шкалы. В некоторых приборах (штангенциркуль, микрометр) для этой цели предусмотрены специальные дополнительные шкалы, называемые нониусами. На тех приборах, где нониусов нет, в связи с приближенной оценкой доли наименьшего деления возникает погрешность отсчета. Для обычных шкал эту погрешность принимают равной половине цены деления прибора С, т.е.  . Например: для линейки с миллиметровыми делениями Δхотсч.= 0,5 мм, а с сантиметровыми – 0,5 см. Если шкала прибора зеркальная, то погрешность отсчета берут равной С/5. Погрешность микрометра и штангенциркуля указана на этих приборах.
. Например: для линейки с миллиметровыми делениями Δхотсч.= 0,5 мм, а с сантиметровыми – 0,5 см. Если шкала прибора зеркальная, то погрешность отсчета берут равной С/5. Погрешность микрометра и штангенциркуля указана на этих приборах.
При использовании цифровых приборов за погрешность отсчета принимают единицу младшего разряда. Для лабораторных секундомеров это, как правило, 0,01 или 0,001 с.
Погрешность отсчета берется в качестве систематической ошибки в том случае, если нет других данных о погрешности прибора, например, нет информации о классе точности.
Величина сдвига нуля шкалы обычно определяется в начале наблюдений и сразу проводится коррекция результатов.
Погрешность метода измерений – это самая сложная по своей природе систематическая погрешность. В механике главной причиной таких погрешностей являются силы трения различного вида, в электричестве – это неучитываемые падения напряжений на внутренних сопротивлениях приборов, контактов и подводящих проводов и т.п. Существование этой погрешности выявляется обычно при несовпадении теоретически рассчитанных и измеренных величин с учетом всех других погрешностей. Это происходит, как правило, при достаточно высокой точности измерений.
1.4. Оценка погрешности при прямых однократных измерениях
При этом типе измерений мы будем оценивать только систематическую погрешность, связанную с видом применяемых приборов. Это либо приведенная погрешность, либо погрешность отсчета. Следовательно, необходимо знать либо класс точности прибора, либо цену деления шкалы измерительного прибора.
Погрешность табличных величин, если она не оговорена в справочнике, берется равной 5 единицам в разряде, следующем за млад-шим. Например, если значение g берется равным 9,8 м/с2, то Δg=0,05 м/c2. Если же взять величину g равной 9,81 м/с2, то Δg=0,005 м/с2.
К погрешности табличной величины сведется и погрешность измерения массы, т.к. она определена по эталонным грузам (как правило, выгравирована на используемых грузах и перегрузках).
Отметим, что при записи значений измеряемых величин нули справа указывают на точность измерений. Например, такая запись длины L=1,00 м предполагает погрешность ΔL = 0,005 м, а при записи L = 1м, подразумевается ΔL = 0,5 м. Аналогично, запись значений масс в виде m=100 г и m=0,1 кг неэквивалентна с точки зрения точности. Правильная запись m=100 г = 0,100 кг. Еще один пример: если х=1,26∙103, то погрешность Δх = 0,005×103 = 5, а при записи х=1260 получим погрешность Δх = 0,5, т.е. в десять раз меньше.
1.5. Оценка величины случайной погрешности
Случайные погрешности являются следствием случайных, неконтролируемых помех, влияние которых на процесс измерения невозможно учесть непосредственно, проявляются в хаотическом изменении результатов повторных наблюдений, могут отклонять результаты измерения от истинного значения в обе стороны. При обработке результатов эксперимента возникают два вопроса: 1) как найти из полученных значений наиболее вероятное значение измеряемой величины и 2) чему равна ожидаемая погрешность измерений? Ответ на эти вопросы дается теорией вероятностей. Согласно этой теории, случайные погрешности измерений подчиняются закону нормального распределения (закону Гаусса).
Смысл этого закона заключается в следующем. Допустим, мы хотим измерить некоторую физическую величину, истинное (и нам неизвестное) значение которой есть хо. Проведя несколько раз измерения, вместо хо получаем набор значений х1, х2, … хi, … xn. Оказывается, что с помощью закона распределения мы хотя и не можем указать точное значение хо, но можем найти, с какой вероятностью Р величина хо окажется в любом интервале значений а<xo<b . Область значений а<xo<b называют доверительным интервалом. По закону Гаусса эта вероятность определяется функцией плотности распределения
 (1.4)
(1.4)
и равна
 . (1.5)
. (1.5)
Функция плотности распределения f(x) характеризует число случаев, когда измеряемая величина попала в интервал от x до x+dx (dx- малое изменение измеряемой величины). x – набор значений, которые мы получаем в результате измерения, áxñ – их среднее арифметическое, а  среднее квадратичное отклонение
среднее квадратичное отклонение
 , (1.6)
, (1.6)
 .(1.7)
.(1.7)
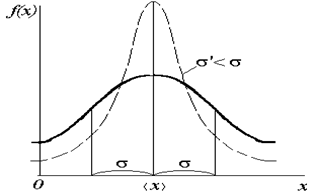
Рис. 1.1.
Как видно из рисунка, гауссова кривая, имеющая на графике симметричный колоколообразный вид, характеризуется двумя параметрами: положением вершины – áxñ и шириной 2σ – расстоянием между точками перегиба. Значение áxñ обычно принимают за ту величину, которую надо было измерить, а σ характеризует степень влияния случайных погрешностей на результаты измерения: чем меньше σ, тем уже гауссова кривая и тем, следовательно, точнее проведено измерение. Площадь под кривой от а до b определяет долю случаев, в которых измеряемая величина лежит в этом интервале (т.е. вероятность того, что измеряемая величина попала в интервал от а до b).
Следует подчеркнуть, что áxñ – не истинное значение измеряемой величины, а лишь некоторое приближение к нему. Чем более широким выбирается доверительный интервал, тем выше вероятность попадания истинного значения в этот интервал. Так, например, вероятность отклонения истинного значения от положения вершины гауссовой кривой áxñ не более чем на σ равна 0,683, а не более чем на 2σ – 0,955.
Бесконечное увеличение числа измерений не дает заметного увеличения точности. Зависимость надежности (вероятности) от числа измерений сложна и не выражается в элементарных функциях. Существуют специальные таблицы коэффициентов Стьюдента, по которым можно определить, во сколько раз надо увеличить стандартный доверительный интервал Sáxñ, чтобы при определенном числе измерений n получить требуемую вероятность (надежность) Р.
Стандартный доверительный интервал или среднеквадратичная ошибка среднего согласно выводам математической статистики убывает пропорционально  и определяется формулой:
и определяется формулой:
 . (1.8)
. (1.8)
Таблица 1.1
Таблица коэффициентов Стьюдента t (P,n)
| P N | 0,5 | 0,7 | 0,9 | 0,95 | 0,999 |
| 0,82 | 1,3 | 2,9 | 4,3 | 31,6 | |
| 0,74 | 1,2 | 2,1 | 2,8 | 8,6 | |
| 0,72 | 1,1 | 1,9 | 2,4 | 6,0 | |
| 0,70 | 1,1 | 1,8 | 2,3 | 4,8 | |
| 0,69 | 1,1 | 1,7 | 2,1 | 3,9 | |

| 0,67 | 1,0 | 1,6 | 2,0 | 3,3 |
Чтобы найти величину случайной погрешности, необходимо стандартный доверительный интервал умножить на коэффициент Стьюдента.
Δхсл.= t (P,n) . Sáxñ. (1.9)
1.6. Оценка погрешности при прямых многократных измерениях
Ошибка при этих измерениях складывается из случайной и систематической погрешностей. Выполнив n измерений и записав их результаты в таблицу, вычисляют по (1.6) среднее арифметическое значение измеряемой величины. Затем по формуле (1.8) вычисляют стандартный доверительный интервал, находят по таблице коэффициент Стьюдента в зависимости от требуемой надежности (вероятности) и числа измерений и по формуле (1.9) вычисляют величину случайной погрешности.
Поскольку величину случайной погрешности в некоторой степени регулирует сам экспериментатор, то возникает вопрос, до каких же пределов имеет смысл уменьшать величину этой погрешности? Напомним, что при любых измерениях присутствует систематическая погрешность, связанная с ограниченной точностью используемых приборов. Поэтому оптимальной методике многократных измерений соответствует такая, при которой величина случайной ошибки Δхсл. не превышает величины систематической Δхсист. Этот критерий служит для оценки максимально разумного числа наблюдений N. Дальнейшее повышение точности измерений должно происходить за счет применения более точных приборов.
Полная погрешность при многократных измерениях определяется по формуле:
 . (1.10)
. (1.10)
Если одна из компонент – Δхсл. или Δхсист. в два и более раза превышает другую, то меньшей пренебрегают. Причина этого в том, что случайная погрешность при малом числе измерений (N<15) по формуле (1.9) определяется приближенно. Погрешность этого приближения составляет порядка 30%. Такая погрешность величины Δх позволяет говорить только об оценке величины погрешности, а при записи значения использовать округление. Если первая значащая цифра равна 1, то округляют до двух значащих цифр, например: Δх=0,013. Если первая значащая цифра больше или равна 2, то округляют до одной (первой) значащей цифры, например: Δх=0,35789 0,4 или Δх=0,035789 0,04.
0,4 или Δх=0,035789 0,04.
Результат измерений (среднее значение áxñ) также округляется до разряда последней значащей цифры в уже округленной погрешности, например: при Δх=0,4 имеем áxñ=1,25781,3. Окончательный результат измерений записывается в виде:
Х = áxñ  Δx =1,3 0,4 (размерность измеряемой величины).
Δx =1,3 0,4 (размерность измеряемой величины).
1.7. Оценка погрешности косвенных измерений
Результат косвенных измерений вычисляется по расчетной формуле, куда обычно входят как табличные величины, так и величины, полученные при прямых измерениях. Каждая из них имеет свою погрешность, а задача состоит в том, чтобы учесть их влияние на погрешность конечного результата.
Существуют математические приемы, с помощью которых из расчетной формулы выводится функция для вычисления погрешности косвенных измерений. Эти приемы различны в зависимости от вида расчетной формулы, которая может содержать либо только сомножители, либо еще и слагаемые. Чтобы эти действия были более наглядны, возьмем в качестве примера формулу для определения ускорения, а при равноускоренном движении без начальной скорости, которая содержит только сомножители:
 , (1.11)
, (1.11)
где S – путь, t – соответствующее время.
1. Логарифмируем расчетную формулу:

2. Берем дифференциал от левой и правой части. Напомним, что дифференциал какой-либо величины y – это ее изменение dy при бесконечно малом изменении аргумента dx, а производная некоторой функции – это отношение дифференциалов функции и аргумента, т.е.  . Отсюда следует, что дифференциал функции равен
. Отсюда следует, что дифференциал функции равен  . Кроме того, производная от функции
. Кроме того, производная от функции  равна
равна  , а дифференциал суммы равен сумме дифференциалов. В результате дифференцирования получаем:
, а дифференциал суммы равен сумме дифференциалов. В результате дифференцирования получаем:
 . (1.12)
. (1.12)
3. Заменяем дифференциалы величин на соответствующие абсолютные погрешности, а также все знаки «минус» меняем на знак «плюс», т.е. относительные погрешности только складываются:
 . (1.13)
. (1.13)
Обычно путь S является однократным измерением (задается самим экспериментатором), а соответствующее время t измеряется несколько раз. Погрешность Δt вычисляется по формуле (1.10), а в знаменатель (1.13) подставляется среднее время átñ. Получим среднее значение ускорения áañ, подставив в (1.11) среднее время átñ и соответствующий ему путь S. Максимальная абсолютная погрешность ускорения определяется из (1.13):
 . (1.14)
. (1.14)
Формула (1.14) указывает на оптимальную методику проведения измерений, т.е. на достижение максимальной точности определения ускорения. Для этого время надо измерять точнее, чем путь, т.к. отно-сительная погрешность времени входит в (1.14) с коэффициентом 2.
Если расчетная формула содержит как сомножители, так и слагаемые, то вычисляется сначала максимальная абсолютная погрешность косвенного измерения. Используем в качестве примера формулу для измерения потенциальной энергии шарика массой m, падающего с высоты Н1 до отметки Н2:
W = mg (H1 – H2), (1.15)
где g – ускорение свободного падения.
Для получения формулы вычисления ошибки измерений проделаем следующие операции:
1. Возьмем дифференциал от расчетной формулы:
dW = g (H1 – H2) dm + m (H1 – H2) dg + mg (dH1 – dH2). (1.16)
2. Заменим дифференциалы на соответствующие абсолютные погрешности, а также знаки «минус» между дифференциалами на знаки «плюс». Получаем:
ΔW = g (H1 – H2)Δm + m (H1 – H2)Δg + mg (ΔH1 +ΔH2). (1.17)
3. Делим левую и правую части на расчетную формулу. Поделим выражение (1.17) на (1.15), получим относительную погрешность измерения:
 . (1.18)
. (1.18)
Из (1.15) следует, что с максимальной точностью следует измерять высоты Н1 и Н2, т.к. относительная погрешность есть результат деления на малую величину разности (Н1 – Н2). В этой формуле величины m, Н1, Н2 являются результатами однократных измерений, а ускорение свободного падения g – табличной величиной.
 Экспериментальная часть
Экспериментальная часть
Упражнение 1. Определение погрешности прямого многократного измерения времени
Примером прямых многократных измерений может служить массив измерений времени лабораторным секундомером. Поскольку цена деления секундомера 0,01 с, а реакция человека составляет десятые доли секунды, то при попытках остановить секундомер точно на заданном значении мы получим набор случайно распределенных около этого значения результатов.
Проведение измерений
1. Ознакомиться с работой секундомера и подключить его к сети.
2. В качестве тренировки попытаться несколько раз установить на секундомере значение 1,00 с или какое-либо другое, указанное преподавателем.
3. Проделать серию измерений (5 – 7) раз с целью установления на секундомере указанного значения времени.
4. Записать результаты измерений в таблицу 1.2.
Вычисление погрешности
Для вычисления погрешности прямых многократных измерений предлагается следующий порядок действий.
1. Вычислить среднее значение  по формуле (1.6).
по формуле (1.6).
2. Найти погрешности отдельных измерений:  .
.
3. Вычислить квадраты погрешностей отдельных измерений:
4. Определить среднеквадратичную погрешность среднего  по формуле (1.8).
по формуле (1.8).
5. Для данного числа измерений  и доверительной вероятности
и доверительной вероятности  найти в таблице 1.1 значение коэффициента Стьюдента
найти в таблице 1.1 значение коэффициента Стьюдента  .
.
6. Вычислить случайную погрешность  по формуле (1.9).
по формуле (1.9).
7. Записать значение систематической погрешности (погрешности прибора)  .
.
8. Вычислить полную погрешность измерений по формуле (1.10).
9. Оценить относительную погрешность  по формуле (1.2).
по формуле (1.2).
Таблица 1.2
| № | 
|
| 
| 
|
| 
|
|
| 
|
|
Упражнение 2. Определение погрешности косвенного измерения удельного сопротивления
В качестве примера косвенных измерений определим удельное сопротивление хромоникелевого провода с помощью прибора ФРМ-01. (Подробное описание этого прибора можно получить у лаборанта).
Удельное сопротивление r найдем путем измерения активного сопротивления R, т.к.
 , (1.19)
, (1.19)
где  длина провода,
длина провода,  площадь поперечного сечения провода.
площадь поперечного сечения провода.
Отсюда получим:
 , (1.20)
, (1.20)
где  диаметр провода.
диаметр провода.
Для проведения измерений используем режим точного измерения тока.
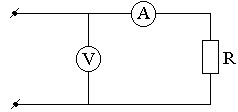
Рис. 1.2. Схема измерений в режиме точного измерения тока
В этой схеме показания вольтметра включают в себя падения напряжения как на измеряемом сопротивлении R, так и на внутреннем сопротивлении амперметра 
 . (1.21)
. (1.21)
Отсюда имеем:
 . (1.22)
. (1.22)
Проведение измерений
Таблица 1.3 …Подготовка прибора к измерениям
2) При помощи регулируемых ножек основания привести колонну прибора в вертикальное положение, ориентируясь по положению нити с грузиками (отвес). … 3) Установить средний кронштейн на заданной высоте над нижним кронштейном так,… 4) Установить верхний кронштейн на заданной высоте над средним кронштейном в одной плоскости с ним и с нижним…Измерения
2) Согласовать нижнюю грань правого грузика с чертой на верхнем кронштейне. 3) Измерить при помощи шкалы на колонне прибора пути равноускоренного S1 и… 4) Нажать клавишу “пуск”.ИЗУЧЕНИЕ ЗАКОНОВ ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ
НА МАШИНЕ АТВУДА
Приборы и принадлежности: машина Атвуда с платформой и электромагнитом, секундомер, набор грузов и перегрузков.
Перед выполнением работы необходимо ознакомиться с основными понятиями кинематики материальной точки и поступательного движения твердого тела: траектория, длина пути, перемещение, мгновенная скорость, ускорение, а также с законами динамики материальной точки и поступательного движения твердого тела (законами Ньютона).
3.1. Описание прибора и метода работы
Машина Атвуда представляет собой вертикальную рейку со шкалой А, прикрепленную к стене или укрепленную на массивном чугунном треножнике (рис. 3.1).
 Рис.3.1.
Рис.3.1.
|  Рис.3.2.
Рис.3.2.
|
На верхнем конце рейки имеется легкий алюминиевый блок В, вращающийся с малым трением. Через блок перекинута нить, на концах которой подвешиваются грузы С и С’ разных масс М1 и М2
Масса грузов слагается из массы основного (большого) груза с подвеской  и добавочных грузиков (перегрузков) m:
и добавочных грузиков (перегрузков) m:
M = mo + m
Вдоль рейки может перемещаться платформа Д. Левый груз С’ в нижнем (начальном) положении удерживается электромагнитом Э. Тумблер К, укрепленный сбоку на рейке, находится при этом в положении «вниз».
При переключении тумблера в положение «вверх» электромагнит отключается, вся система грузов приходит в движение.
При этом одновременно включается секундомер. В момент удара груза С о платформу Д секундомер выключается.
Рассмотрим движение грузов массой М1 и М2 на машине Атвуда (рис.3.2). Каждый из рассматриваемых грузов находится под действием двух сил: силы тяжести P=mg и силы натяжения Т (силами трения пренебречь). Применяя II закон Ньютона для каждого груза, получим:
 (3.1)
(3.1)
Если считать, что нить и блок невесомы, то сила натяжения нити по всей длине одинакова:
Т1=Т2=Т.
Вследствие нерастяжимости нити, ускорения обоих грузов равны по величине и противоположны по направлению:  .
.
Тогда уравнение (3.1) можно переписать в виде:
 (3.1’)
(3.1’)
Проецируя эти уравнения на вертикальное направление, получим систему:

Решая систему уравнений относительно а, находим:
 (3.2)
(3.2)
Из формулы (3.2) видно, что сила F, которая сообщает ускорение системе грузов на нити общей массой Мс=М1+М2, равна разности сил тяжести грузов P2 – P1, находящихся на концах нити, то есть
F= P2 – P1=(М2 – М1)g.
Ускорение системы а всегда меньше ускорения свободного падения g и может быть определено экспериментально.
Если F=(М2 – М1)g во время движения не изменяется, то движение системы будет равноускоренно, и для него справедливо уравнение:

где S – расстояние, проходимое грузом Р за время t.
Измеряя S и t, можно определить ускорение:
 .
.
Из-за весомости блока и наличия сил трения в оси блока, ускорение, наблюдаемое на опыте, будет меньше, чем определяемое формулой (3.2)
Примечание: Если суммарные массы подвески и основного груза (m0) на концах нити одинаковы, то сила F =P2 - P1, сообщающая ускорение системе грузов на нити, будет равна разности сил тяжести перегрузков, находящихся на разных концах нити: F =(m2 - m1)g
Перекладывая перегрузки с одного конца нити на другой (но не снимая с нити), можно менять величину движущей силы F, не меняя общей массы системы Мс.
Меняя же массу основных грузов m0 при неизменном положении перегрузков, можно менять общую массу системы Мс при постоянной движущей силы F.
Порядок выполнения работы
1. Включить секундомер и электромагнит в сеть. На концы нити подвесить основные грузы одинаковой массы m0. На правый конец нити добавить перегрузок… 2. Левый груз С’ опустить до соприкосновения с электромагнитом. Тумблер К… 3. Переводом тумблера К в положение «вверх» выключить ток в обмотке электромагнита. Одновременно включится секундомер…Задание 2. Проверка следствий II закона Ньютона
а) проверка соотношения:  при m=const. (3.4)
при m=const. (3.4)
1. На концы нити подвесить по основному грузу одинаковой массы (30 – 50 г) и 2 – 3 перегрузка так, чтобы разность сил тяжести грузов на концах нити была не более 20 г. Установить платформу Д в определенном положении.
2. Зная массу грузов на нити (она указана на самих грузах), определить массу системы Мс=М1+М2 и движущую силу F=(М2 - М1)g.
3. Провести измерения согласно 2 – 4 задания 1.
4. Изменить движущую силу F, не меняя массы системы Мс. Для этого, оставляя основные грузы на месте, переложить один перегрузок с правого конца нити на левый так, чтобы величина разности (М2 - М1) изменилась.
5. Повторить опыт (3 – 5 раз) для нового положения грузов. Данные измерений занести в таблицу 3.2.
б) Проверка соотношения:  при F=const. (3.5)
при F=const. (3.5)
1. На концах нити подвесить основные грузы одинаковой массы (30 – 50 г), на правый конец добавить перегрузок (7 – 10 г). Определить общую массу системы Мс=М1+М2, движущую силу F=(М2 - М1)g.
2. Провести измерения времени движения (3 – 5 раз) для выбранной высоты S.
3. Изменить массу системы Мс, не меняя движущей силы F. Для этого, оставляя перегрузок на месте, заменить прежние основные грузы новыми или добавить на оба конца по грузу одинаковой массы (20-30 г).
4. Повторить опыт (3 – 5 раз) для новой системы грузов. Все данные измерений занести в таблицу 3.2.
Таблица 3.2
| S, м | t, с | tср, с | а, мс-2 | M1, кг | M2, кг | Мс=М1+М2,, кг | F=(М2 - М1)g. H | |
| а) | a1 | const | F1 | |||||
| a2 | F2 | |||||||
| б) | a1 | Мс1 | const | |||||
| a2 | Мс2 |
Обработка результатов измерений
2. Пользуясь формулой , вычислить ускорения. 3. Подсчитать погрешность измерения ускорений ,Теория метода и описание установки
. (4.7) До столкновения импульс шаров определяется по формуле: . (4.8)Задание 1. Определение коэффициентов восстановления скорости и энергии при ударе шаров
1. Проверить положение основания прибора. В случае необходимости произвести его установку по уровню.
2. Взвешиванием на технических весах определить массы шаров m1 и m2. Подвесить шары и произвести их центровку. Измерить длину подвеса шаров l.
3. Установить электромагнит в положение, соответствующее определенному углу α. Включить установку.
4. Отклонить правый шар на угол α и зафиксировать с помощью электромагнита его положение, занести в таблицу 4.1 значение угла. Левый шар оставить в состоянии покоя.
5. Нажать кнопку «пуск» и произвести отсчет первого отброса после удара для обоих шаров α1 и α2 (лучше отсчет делать вдвоем, так как одному наблюдателю практически невозможно следить сразу за двумя шарами). Занести в таблицу значения этих углов, а также время столкновения шаров Δt.
6. Удар из данного положения произвести не менее 5 раз, занося данные в таблицу.
7. Повторить опыт при 2 – 5 (по указанию преподавателя) различных первоначальных положениях ударяющегося шара. Данные записать в таблицу.
8. По формулам (4.4) и (4.6) рассчитать коэффициенты восстановления скорости и энергии, используя средние значения углов отклонения.
Задание 2. Определение энергии остаточной деформации
1. Проделать все операции, указанные в пунктах 1 – 7 задания 1.
2. По формулам (4.7), (4.10) и (4.11) вычислить скорости шаров до и после удара и погрешности, с которыми эти скорости были определены.
3. По формуле (4.5) найти энергию остаточной деформации для различных значений скорости первого шара до удара (для различных углов α).
4. Построить график зависимости энергии остаточной деформации от скорости ударяющего шара (если было выполнено более 2 опытов).
Задание 3. Проверка закона сохранения импульса для упругого удара и закона сохранения импульса и энергии для абсолютно упругого удара
1. Проделать все операции, указанные в пунктах 1 – 7 задания 1.
2. По формулам (4.7), (4.10), (4.11) вычислить скорости шаров до и после удар
3. Из закона сохранения импульса для упругого удара шаров в нашем опыте имеем:
 .
.
Обозначим  как
как  и рассчитаем по формуле:
и рассчитаем по формуле:
 .
.
Расчеты занести в таблицу и сравнить экспериментальные значения  с теоретическими .
с теоретическими .
4. Считая удар абсолютно упругим и используя формулы для скоростей после удара (полученные из закона сохранения импульса и закона сохранения энергии), рассчитать теоретические значения скоростей  и
и  :
:
 ,
,
 ,
,
занести в таблицу 4.1 и сравнить со скоростями  и
и  , полученными экспериментально.
, полученными экспериментально.
Задание 4. Определение средней силы удара
1. Проделать все операции, указанные в пунктах 1-7 задания 1.
2. По начальному углу отклонения шара и углу отскока определить скорости шара в момент удара и после удара, найти изменение импульса одного из шаров.
Таблица 4.1
m1 = кг, m2 = кг, l = м
| № | a град | a1 град | a2 град | Dt мс | V1, м/с | U1, м/с | U2, м/с | Кэ | Кv | Wод Дж | U/2 м/с | U//1 м/с | U//2 м/с | Fср Н |
| ср |
3. Рассчитать по формуле  среднюю силу удара.
среднюю силу удара.
4. Определить среднюю силу удара для всех углов бросания одного и того же шара. Построить график зависимости средней силы удара от начальной скорости (если было проделано более двух опытов).
Контрольные вопросы
1. Сформулируйте цель работы.
2. Что такое импульс материальной точки, системы материальных точек?
3. Сформулируйте законы изменения и сохранения импульса.
4. Что такое энергия? Какие Вы знаете виды механической энергии и их свойства?
5. Какие силы называются потенциальными и диссипативными?
6. Сформулируйте законы изменения и сохранения полной механической энергии.
7. Что такое удар тел? Дайте определение абсолютно упругого и неупругого ударов.
8. Что характеризуют коэффициенты восстановления энергии и скорости?
9. Выведите все расчетные формулы.
10. Как изменяется кинетическая энергия шаров и их относительная скорость при абсолютно упругом, упругом и абсолютно неупругом ударах?
11. Можно ли сказать до опыта как будет влиять скорость ν1 на величины KЭ, KС, WОД, Fср?
12. Почему для определения коэффициентов восстановления берут серию опытов?
13. На основании какого физического закона выводится формула для определения силы удара шаров?
14. Сделайте выводы по работе.
5. Проверка закона сохранения механической энергии
с помощью прибора гримзеля
Приборы и принадлежности: прибор Гримзеля, масштабная линейка стальной шарик, полоски белой бумаги, копировальная бумага.
Перед выполнением работы необходимо изучить следующие темы из курса механики: работа силы, потенциальные и непотенциальные силы, механическая энергия, кинетическая энергия, потенциальная энергия, закон изменения механической энергии, закон сохранения механической энергии.
Описание установки и метода работы
Рис. 5.1.Порядок выполнения работы и обработка
1. Взвесить на весах шарик, вставить его в кольцо, измерить линейкой высоту H2 (рис. 5.1). 2. Закрепить электромагнит в некотором положении, включить ток в его… 3. Отклонить шарик до соприкосновения с электромагнитом и измерить линейкой высоту H1.Контрольные вопросы
1. Сформулируйте цель работы.
2. Энергия. Работа, как способ передачи энергии. Величина работы. Единицы измерения энергии, работы.
3. Кинетическая энергия. От чего она зависит?
4. Потенциальная энергия. Знак и величина потенциальной энергии. От чего она зависит?
5. Замкнутая система тел. Система каких тел рассматривается в работе? Является ли она замкнутой?
6. Консервативные (потенциальные) силы, системы. Является ли рассматриваемая в работе система консервативной?
7. Закон сохранения механической энергии. Выполняется ли он в работе? Покажите это на основе результатов измерений.
8. Как рассчитывается кинетическая энергия в работе (выведите формулу)?
9. Может ли быть T>ΔП, Т<ΔП ?
10. Порядок выполнения работы, обработка результатов измерений и их анализ.
11. Сделайте выводы по работе.
6. Изучение законов вращательного движения
на маятнике Обербека
Приборы и принадлежности: маятник Обербека, набор грузов, штангенциркуль.
Перед выполнением работы необходимо ознакомиться со следующими понятиями и законами: материальная точка, абсолютно твердое тело, вращательное движение твердого тела, вектор элементарного поворота, угловая скорость тела, угловое ускорение, момент силы относительно точки, относительно оси, момент инерции материальной точки, тела относительно оси, основной закон вращательного движения твердого тела.
6.1. Описание прибора и метода работы
Основной частью маятника Обербека является крестообразный маховик, который может свободно вращаться вокруг горизонтальной оси (рис.6.1).
 Рис .6.1. Рис .6.1.
| На четырех взаимно-перпендикулярных стержнях закреплены одинаковые по размеру и массе цилиндри-ческие грузы, положение которых можно менять; при этом изменяется момент инерции маховика. На горизонтальной оси маховика имеются два шкива различного диаметра, на один из которых наматывается нить, перекинутая через неподвиж-ный блок. К свободному концу |
нити подвешивается груз массой m. Сила натяжения нити создает постоянный по величине вращательный момент, под действием которого маховик приводится во вращательное движение.
Для экспериментальной проверки основного уравнения динамики вращательного движения необходимо определить угловое ускорение ε и момент силы M.
Если груз массой m, двигаясь равноускоренно, опускается с высоты h за время t, то ускорение его движения определяется по формуле:
 . (6.1)
. (6.1)
Таким же будет тангенциальное ускорение любой точки на поверхности шкива (при условии, что нить не соскальзывает со шкива), то есть
 , (6.2)
, (6.2)
где ε - угловое ускорение вращающегося маховика, r - радиус шкива.
Измеряя диаметр шкива d, с помощью соотношений (6.1) и (6.2) можно найти угловое ускорение маховика:
 . (6.3)
. (6.3)
Вращательный момент M, создаваемый силой натяжения нити T, направленной по касательной к шкиву, равен
 . (6.4)
. (6.4)
Сила натяжения нити T обусловлена действием на нее груза. В предположении невесомой нити и невесомого блока (через который перекинута нить) сила натяжения постоянна по всей длине нити. Ее можно найти из второго закона Ньютона для опускающегося груза массой m:
 .
.
В проекции на направление движения ma = mg - T,откуда
T = m (g – a). (6.5)
С учетом того, что r = d/2 и с использованием соотношения (6.1) выражение для вращающегося момента примет вид:
 . (6.6)
. (6.6)
Экспериментальную проверку основного закона динамики вращательного движения можно осуществить следующим образом: при неизменном моменте инерции маховика изучить зависимость его углового ускорения ε от величины вращающего момента M. При этом изменение M можно осуществить изменением массы подвешиваемого груза либо изменением радиуса шкива, на который наматывается нить. Если построить график зависимости ε от M, то экспериментальные точки должны укладываться на прямую, по тангенсу угла наклона α которого можно определить момент инерции маховика. Действительно, поскольку
 , то
, то  ,
,
откуда  .
.
Порядок выполнения работы
Изучение законов вращательного движения выполняется на маятнике Обербека. Подробное описание этого прибора можно получить у лаборанта.
Подготовка прибора к измерениям
2) Навесить на блок нить с грузом массой m. 3) Установить подвижный (верхний) кронштейн на заданной высоте над нижним… 4) Включить сетевой шнур измерителя в сеть.Измерения
2) Измерить с помощью штангенциркуля диаметры и обоих шкивов маятника. 3) Намотать нить на один из шкивов, к другому концу нити подвесить груз массой… 4) Совместить нижний край груза с чертой на корпусе верхнего фотоэлектрического датчика.Контрольные вопросы
1. Сформулируйте цель работы.
2. Как определяются угловая скорость, угловое ускорение? Укажите направления этих величин.
3. Что называется моментом силы относительно точки, относительно неподвижной оси? Как он направлен? Чему равен модуль момента силы? Что называется плечом силы? Какова единица измерения момента силы?
4. Сформулируйте основной закон динамики вращательного движения. Сопоставьте уравнение  со вторым законом Ньютона
со вторым законом Ньютона  . Проведите аналогию величин, характеризующих вращательное и поступательное движения.
. Проведите аналогию величин, характеризующих вращательное и поступательное движения.
5. Что называется моментом инерции материальной точки, тела относительно некоторой оси?
6. Как осуществляется в работе проверка основного закона динамики вращательного движения?
7. Какая сила создает вращающий момент в данной установке? Как ее можно определить? Каким образом изменяют момент этой силы при выполнении работы?
8. От чего зависит момент инерции маятника Обербека? Как его можно изменить?
9. Сделайте выводы по работе.
7. Определение момента инерции и проверка закона сохранения энергии с помощью маятника Максвелла
Приборы и принадлежности: маятник Максвелла РМ-03, металлические кольца, штангенциркуль.
Перед выполнением работы необходимо изучить следующие темы из курса механики: линейная и угловая скорости, связь между ними; линейное и угловое ускорения и связь между ними; момент силы; момент инерции; моменты инерции симметричных тел: шара ,диска, цилиндра; вывод формулы момента инерции сплошного цилиндра, вращающегося вокруг оси; основное уравнение динамики вращательного движения; кинетическая энергия вращательного движения; закон сохранения механической энергии.
Задание 1. Определение момента инерции маятника Максвелла относительно его оси
Введение
Различают пять видов движения тела:
1) поступательное; 2) вращение вокруг неподвижной оси; 3) плоское движение; 4) сферическое движение (вокруг неподвижной точки); 5) свободное движение.
Первые два вида движений (поступательное и вращение вокруг не подвижной оси) являются основными движениями твердого тела. Остальные виды движения твердого тела можно свести к одному из главных или к их совокупности.
Поступательное движение – это движение твердого тела, при котором любая прямая, связанная с телом, все время остается параллельной своему начальному положению (например, вагон, движущийся по прямому участку пути, кабина колеса обозрения и др.).
Вращательное движение вокруг неподвижной оси АВ – это такое движение твердого тела, при котором все точки прямой АВ, жестко связаны с телом, остаются неподвижными. Прямая называется осью вращения тела.
Плоское движение – это такое движение, при котором каждая точка твердого тела движется в плоскости, параллельной некоторой неподвижной (в данной системе отсчета) плоскости.
Плоское движение совершает маятник Максвелла, который представляет собой диск, насаженный на тонкий стержень и подвешенный на двух нитях закрепленных на оси диска. Нить накручивается на ось диска. При раскручивании нити диск спускается, вращаясь вокруг своей оси. Плоское движение диска можно рассматривать как сумму поступательного движения оси вращения АВ и вращательного движения диска вокруг неподвижной оси АВ. Поэтому мы для описания движения маятника Максвелла воспользуемся основными уравнениями динамики поступательного движения.
 , (7.1)
, (7.1)
где  - результирующая всех сил, действующих на тело массой m,
- результирующая всех сил, действующих на тело массой m,  - его ускорение; и вращательного движения:
- его ускорение; и вращательного движения:
 , (7.2)
, (7.2)
где  - результирующий момент всех сил, действующих на тело с моментом инерции J,
- результирующий момент всех сил, действующих на тело с моментом инерции J,  - его угловое ускорение.
- его угловое ускорение.
 Рис.7.1
Рис.7.1
|
На ось действуют две силы – сила натяжения нити  и сила тяжести
и сила тяжести , где
, где  – суммарная масса диска и оси. Следовательно,
– суммарная масса диска и оси. Следовательно,  . Сила натяжения нити создает вращательный момент , где r - радиус осевого стержня. Тогда уравнения в проекциях на ось ОХ и на ось вращения АВ соответственно имеют вид:
. Сила натяжения нити создает вращательный момент , где r - радиус осевого стержня. Тогда уравнения в проекциях на ось ОХ и на ось вращения АВ соответственно имеют вид:
 (7.3)
(7.3)
Для решения этой системы уравнений воспользуемся связью между тангенциальной составляющей ускорения и угловым ускорением  . Тогда для момента инерции маятника Максвелла мы получаем выражение
. Тогда для момента инерции маятника Максвелла мы получаем выражение
 . (7.4)
. (7.4)
Из этого выражения видно, что маятник Максвелла будет двигаться равноускоренно; если учесть, что маятник опускается с высоты без начальной скорости, то
 , (7.5)
, (7.5)
тогда из (7.4) следует:
 . (7.6).
. (7.6).
Следовательно, по этой формуле мы сможем определить момент инерции маятника Максвелла.
Момент инерции однородного диска и цилиндра относительно оси, проходящей через ось симметрии цилиндра можно определить также по формуле:
 , (7.7)
, (7.7)
где m1 - масса цилиндрического тела, R1 - его радиус.
Используя формулу (7.7) можно легко получить формулу для моментов инерции полых цилиндрических тел
 , (7.8)
, (7.8)
где R2 - внешний, R1 - внутренний радиус полого цилиндра.
Момент инерции нескольких тел равен сумме моментов инерции каждого тела в отдельности. Следовательно, момент инерции маятника Максвелла JP равен сумме моментов инерции диска JD, кольца JK и оси JO: JP = JO + JD +JK.
Тогда для момента инерции маятника Максвелла можно получить расчетную формулу:
 , (7.9)
, (7.9)
где mO - масса оси, mD - масса диска, mK - масса кольца, RD - радиус диска, RK - внешний радиус кольца, RO - радиус оси.
В сопоставлении значений момента инерции маятника Максвелла, полученных экспериментально и расчетным путем, заключается предлагаемая к выполнению работа.
7.1. Описание установки
Маятник Максвелла – это диск, закрепленный на оси и подвешенный на двух нитях. На диск накладывается одно из трех колец, изменяя таким образом его момент инерции JP = JO + JD +JK, где JO - момент инерции оси маятника, JD - момент инерции диска, JK - момент инерции кольца, аксиально надетого на диск.
Маятник с надетым кольцом удерживается в верхнем положении (нулевая отметка шкалы) электромагнитом, который действует при включении прибора в сеть. На колонке прибора закреплена миллиметровая шкала, по которой определяется длина маятника.
На верхнем неподвижном кронштейне кроме электромагнита находится фотоэлектрический датчик. Нижний кронштейн вместе с прикрепленным к нему фотоэлектрическим датчиком можно перемещать вдоль колонки и фиксировать в произвольно избранном положении, соответствующем длине маятника.
Таким образом, при отключении электромагнита мятник падает с высоты h, равной длине маятника. Время падения отмечается секундомером.
Порядок выполнения работы
1. Надеть на диск кольцо, прижимая его до упора.
2. Нажатием клавиши СЕТЬ включить напряжение питания, при котором высвечиваются лампочки фотоэлектрических датчиков №1 и №2 и циферблат миллисекундомера. Одновременно включается электромагнит.
3. На ось маятника намотать нить подвески, стараясь, чтобы она наматывалась равномерно, виток к витку.
4. Фиксировать маятник при помощи электромагнита, обращая внимание на то, что нить в этом положении не была слишком скручена. Убедиться, что нижняя грань кольца отвечает нулю шкалы на колонке. Чуть повернуть маятник в направлении его движения (на угол около 5о).
5. Установить нуль миллисекундомера нажатием клавиши СБРОС.
6. Нажать клавишу ПУСК, при этом отключается электромагнит, маятник падает, включается миллисекундомер, идет отсчет времени.
7. Замер времени повторить 5 раз. Все измерения занести в табл. 7.1.
8. Определить значение среднего времени падения.
9. Измерить внешний диаметр оси маятника D.
10. По шкале на вертикальной колонке прибора определить длину маятника h, а по формуле m = mO + mD + mK вычислить массу маятника вместе с кольцом, где mO – масса оси маятника, mD – масса диска, mK - масса кольца. Значения масс отдельных элементов нанесены на них.
11. По формуле (7.6) определить момент инерции маятника J.
12. Все результаты измерений записать в таблице 7.1. Под таблицей выполнить расчеты.
13. Примечание: при выполнении работы ось маятника должна быть параллельна оси прибора.
14. По формуле:  оценить погрешность измерения момента инерции.
оценить погрешность измерения момента инерции.
15. По формуле (7.9) определить расчетное значение момента инерции маятника Максвелла.
16. Сравнить расчетное значение момента инерции с его экспериментальным значением. Сделать выводы.
17. Опыт повторить с другими кольцами.
Таблица 7.1
| h, м | D , м | m, кг | ti, с | t ср , с | J, кг∙м2 |
Задание 2 . Проверка закона сохранения механической энергии
Методика эксперимента. Вывод расчетной формулы
. (7.10) При падении маятника происходит изменение его потенциальной и кинетической… ,. (7.11)Порядок выполнения работы
2. Рассчитайте изменение потенциальной энергии по формуле (7.12). 3. Рассчитайте изменение кинетической энергии по формуле (7.14). 4. Для этого выполните п.п. 1 –10 задания 1.Контрольные вопросы
1. Сформулируйте цель работы.
2. Назовите основные виды движения твердых тел.
3. Запишите уравнение движения для маятника Максвелла.
4. Момент инерции материальной точки, твердого тела.
5. Получите формулу для момента инерции полых цилиндрических тел относительно оси, проходящей через ось симметрии.
6. Кинетическая энергия тела при сложном движении.
7. Запишите закон сохранения механической энергии для маятника Максвелла.
8. Сделайте выводы по работе.
8. ОПРЕДЕЛЕНИЕ СКОРОСТИ ПОЛЕТА СНАРЯДА С ПОМОЩЬЮ
БАЛЛИСТИЧЕСКОГО КРУТИЛЬНОГО МАЯТНИКА
Приборы и принадлежности: баллистический крутильный маятник, универсальный миллисекундомер, фотоэлектрический датчик.
Перед выполнением лабораторной работы необходимо в учебной литературе по курсу физики ознакомиться со следующими темами: момент количества движения (момент импульса) и закон его сохранения, закон сохранения механической энергии, дифференциальное уравнение свободного гармонического колебания, момент инерции, основной закон динамики вращательного движения.
Теория метода и описание установки
Моментом импульса материальной точки относительно некото-рого центра О называется векторная величина (- векторное произведение вектора на вектор ),… Для твердого тела, вращавшегося вокруг неподвижной оси, момент импульса… Момент импульса системы тел определяется выражениемПорядок выполнения работы
2. Нажать переключатель СЕТЬ, проверяя, все ли индикаторы измерителя высвечивают цифру нуль, а также светится ли лампочка фотоэлектрического… 3. Максимально отдалить друг от друга грузы. 4. Установить маятник в таком положении, чтобы черта на мисочке показывала угол отклонения α=0.Контрольные вопросы
1. Сформулируйте цель работы.
2. Как определяется момент импульса материальной точки, твердого тела относительно неподвижной оси вращения?
3. При каких условиях выполняется закон сохранения момента импульса относительно оси?
4. Почему измерения проводятся при двух положениях перемещаемых грузов?
5. Как получить формулу (8.16)?
6. Сделайте выводы по работе.
9. ИЗУЧЕНИЕ ПРЕЦЕССИИ ГИРОСКОПА
Приборы и принадлежности: гироскоп РМ-10.
Перед выполнением лабораторной работы необходимо в учебной литературе по курсу физики ознакомиться со следующими темами: свободные оси, гироскоп, момент импульса, основной закон динамики вращательного движения.
Введение
В этой работе определяется скорость прецессии гироскопа Ω и проверяется отношения:

 .
.
Гироскопом называется быстро вращающееся симметричное твердое тело, ось вращения которого может изменять свое направление в пространстве. Основное свойство гироскопа – способность сохранять неизменным направление оси вращения при отсутствии момента внешних сил.
 Рис. 9.1.
Рис. 9.1.
|
Рассмотрим гироскоп, состоящий из диска, который может вращаться вокруг горизонтальной оси О1О2 (рис. 9.1) и противовеса К. Ось гироскопа О1О2 шарнирно закреплена в точке О1 вертикальной подставки. Противовес К можно перемещать вдоль оси. Если противовес К расположен таким образом, что точка О1 является центром тяжести, т.е.  где F1 и F2 - силы тяжести диска и противовеса, l1 и l2 плечи сил, то результирующий момент сил, действующих на систему, равен нулю (М=О). В противном случае система отклонилась бы от положения равновесия. Пусть диск уравновешенной системы вращается с угловой скоростью ω. В этом случае на основании II закона динамики для вращательного движения
где F1 и F2 - силы тяжести диска и противовеса, l1 и l2 плечи сил, то результирующий момент сил, действующих на систему, равен нулю (М=О). В противном случае система отклонилась бы от положения равновесия. Пусть диск уравновешенной системы вращается с угловой скоростью ω. В этом случае на основании II закона динамики для вращательного движения
 (9.1)
(9.1)
получим
 , (9.2)
, (9.2)
где  - момент импульса диска. Из уравнения (9.2) следует, что вектор момента импульса в этом случае не зависит от времени.
- момент импульса диска. Из уравнения (9.2) следует, что вектор момента импульса в этом случае не зависит от времени.
 .
.
 Рис.9.2. Рис.9.2.
| Гироскоп обладает постоян-ным моментом импульса , совпадающим по направлению с угловой скоростью; таким образом, при отсутствии момента внешних сил гироскоп сохраняет положение своей оси в пространстве.
Передвинем противовес К на небольшое расстояние вправо. Центр тяжести системы переместится в точку О' (рис.9.2). Равновесие нарушится, ось гироскопа будет составлять с вертикалью угол j.
В этом случае момент силы (в формуле (9.1)) обусловлен , совпадающим по направлению с угловой скоростью; таким образом, при отсутствии момента внешних сил гироскоп сохраняет положение своей оси в пространстве.
Передвинем противовес К на небольшое расстояние вправо. Центр тяжести системы переместится в точку О' (рис.9.2). Равновесие нарушится, ось гироскопа будет составлять с вертикалью угол j.
В этом случае момент силы (в формуле (9.1)) обусловлен
|
смещением центра тяжести системы и
 ,
,
где  - радиус-вектор, проведенный из точки О1 к точке приложения силы. Вектор на рис. 9.2 направлен (по правилу векторного произведения) от нас. Момент силы численно равен
- радиус-вектор, проведенный из точки О1 к точке приложения силы. Вектор на рис. 9.2 направлен (по правилу векторного произведения) от нас. Момент силы численно равен
 . (9.3)
. (9.3)
Из уравнения (9.2) следует, что изменение момента импульса  за время dt совпадает по направления с вектором
за время dt совпадает по направления с вектором
 . (9.4)
. (9.4)
Результирующий момент будет равен
 .
.
Это означает, что ось гироскопа изменит свое положение в горизонтальной плоскости, повернувшись за время dt на угол da. За последующий промежуток времени снова произойдет изменение момента импульса на и т.д. В результате ось гироскопа будет непрерывно вращаться с некоторой угловой скоростью W, описывая в пространстве конус. Такое движение называется прецессией
Величина
 (9.5)
(9.5)
называется угловой скоростью прецессии. Вычислим ее значение.
Из формул (9.3) и (9.4) следует, что
 . (9.6)
. (9.6)
Из рис. 9.2 следует:  , тогда
, тогда
 (9.7)
(9.7)
подставим (9.7) в (9.5), получим

или  . (9.8)
. (9.8)
Из уравнения (9.8) следует, что с увеличением угловой скорости вращения гироскопа ω угловая скорость прецессии W уменьшается. Если скорость вращения диска постоянна w = const, то отношение  постоянно.
постоянно.
Описание прибора
I) СЕТЬ, 2) СБРОС, 3) СТОП, 4) РЕГ. СКОРОСТЬ. Время запуска гироскопа 2 минуты.Порядок выполнения работы
2. Включить питание двигателя. 3. Отрегулировать обороты двигателя 6000 об/мин. 4. Переместить груз на 2 см от положения равновесия.Контрольные вопросы
1. Сформулируйте цели работы.
2. Как определяются направления векторов: углового перемещения, угловой скорости, углового ускорения?
3. Запишите выражения для момента импульса относительно точки и относительно неподвижной оси.
4. Сформулируйте 2-ой закон динамики для вращательного движения.
5. Запишите выражение момента сил относительно точки.
6. Сформулируйте закон сохранения момента импульса.
7. Что называется гироскопом?
8. Куда направлен вектор момента импульса гироскопа?
9. Каково направление вектора момента сил гироскопа? С каким вектором совпадает направление момента сил?
10. Запишите условие равновесия системы.
11. Какое движение называется прецессией? Чему равна угловая скорость прецессии?
12. Как изменится скорость прецессии с изменением угловой скорости вращения?
13. Сделайте выводы по работе.
10. ОПРЕДЕЛЕНИЕ УСКОРЕНИЯ СВОБОДНОГО ПАДЕНИЯ
С ПОМОЩЬЮ ОБОРОТНОГО МАЯТНИКА
Приборы и принадлежности: оборотный маятник, секундомер.
Введение
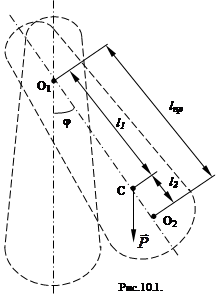 Всякое тело, подвешенное в точке, лежащей выше его центра тяжести, может колебаться и представляет собой физический маятник (рис. 10.1).
Всякое тело, подвешенное в точке, лежащей выше его центра тяжести, может колебаться и представляет собой физический маятник (рис. 10.1).
Если мятник отклонить от положения равновесия на угол j, то сила тяжести  создает относительно оси вращения (проходит через т. О1 перпендикулярно к плоскости рисунка) вращающий момент
создает относительно оси вращения (проходит через т. О1 перпендикулярно к плоскости рисунка) вращающий момент
 , (10.1)
, (10.1)
где l1 - расстояние от оси вращения до центра тяжести С, m – масса маятника, а угол j отсчитывается от вертикальной линии против часовой стрелки. Момент силы М стремится вернуть маятник в положение равновесия.
При малых углах отклонения колебания маятника будут близки к гармоническим. Действительно, при малых углах sinj » j и (10.1) принимает вид:
 . (10.2)
. (10.2)
По основному закону динамики вращательного движения
 , (10.3)
, (10.3)
где J – момент инерции маятника относительно оси О1,
ε = d2φ / dt2 - угловое ускорение
Подставляем M и ε в (10.3), получим
 . (10.4)
. (10.4)
Обозначая  , перепишем (10.4) в виде
, перепишем (10.4) в виде
 . (10.5)
. (10.5)
Уравнение (10.5) – дифференциальное уравнение гармонических колебаний. Решением этого уравнения является функция
 , (10.6)
, (10.6)
где j0 - максимальный угол отклонения маятника от положения равновесия, а  - круговая (или циклическая) частота.
- круговая (или циклическая) частота.
Для периода колебаний получаем:
 . (10.7)
. (10.7)
Величину  называют приведенной длиной физического маятника. Подставив это в (10.7), найдем, что приведенной длина физического маятника равна длине математического маятника с таким же периодом колебаний.
называют приведенной длиной физического маятника. Подставив это в (10.7), найдем, что приведенной длина физического маятника равна длине математического маятника с таким же периодом колебаний.
Точка, находящаяся на расстоянии lпр от точки подвеса по лини, проходящей через центр тяжести, называется центром качания.
Точка подвеса и центр качания обладают свойством обратимости: если центр качания сделать точкой подвеса, то прежняя точка подвеса станет новым центром качания, при этом период колебаний не изменится.
Для доказательства этого утверждения воспользуемся теоремой Штейнера: момент инерции тела относительно оси z равен моменту инерции этого тела относительно оси z’, проходящей через его центр инерции параллельно оси z, плюс произведение массы тела на квадрат расстояния между осями z и z’, т.е. (рис. 10.2)
 , (10.8)
, (10.8)
где J - момент инерции относительно оси z, J0 - момент инерции относительно оси z’, m - масса тела, l - расстояние между осями z и z’.
 Рассмотрим вращение физического маятника вокруг т. О1 (рис. 10.1).
Рассмотрим вращение физического маятника вокруг т. О1 (рис. 10.1).
Проведем линию О1С и на ее продолжении возьмем точку О2, такую, что О1О2= . Обозначим О2С=
. Обозначим О2С= , так что
, так что  . Тогда
. Тогда
 .Таким образом,
.Таким образом,  . Теперь перевернем маятник и рассмотрим его вращение вокруг оси, проходящей через т. О2, при этом
. Теперь перевернем маятник и рассмотрим его вращение вокруг оси, проходящей через т. О2, при этом
 ,
,
откуда следует, что lпр1 =lпр2.
 Зная период колебаний физического маятника и его приведенную длину lпр, ускорение свободного падения рассчитаем по формуле:
Зная период колебаний физического маятника и его приведенную длину lпр, ускорение свободного падения рассчитаем по формуле:
 . (10.9)
. (10.9)
Таким образом, для определения g с помощью физического маятника необходимо измерить период колебаний T и определить приведенную длину маятника lпр.
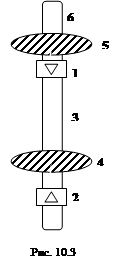
Описание прибора и метода измерений
На металлическом стержне 3 жестко закреплены опорные призмы 1 и 2 и находящаяся между ними чечевица 4. Чечевица 5 может перемещаться по шкале 6 и… Расстояние между призмами постоянно (l0=730 мм). При перемещении чечевицы 5 по стержню изменяются периоды колебаний Т1 и Т2 (на ребрах призм 1 и 2 соответственно).Порядок выполнения работы и обработка
Результатов измерений
2. Закрепить чечевицу 5 на делении 0 по шкале 6. 3. Отклонить маятник от положения равновесия на угол не более 3…5 градусов и… 4. Перевернуть маятник на призму 2 и измерить время t2 пятидесяти (или ста) колебаний, как в пункте 3.– Конец работы –
Используемые теги: Физические, измерения0.048
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Физические измерения
Что будем делать с полученным материалом:
Если этот материал оказался полезным для Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.147 сек.
Новости и инфо для студентов