рефераты конспекты курсовые дипломные лекции шпоры

Реферат Курсовая Конспект
Теоретическая механика
Теоретическая механика - Лекция, раздел Механика, ...
Теоретическая механика
ЛЕКЦИЯ 1
Тема 1.1. Основные понятия и аксиомы статики
Введение
Техническая механика — комплексная дисциплина. Она включает три раздела: «Теоретическая механика», «Сопротивление материалов», «Детали машин». «Теоретическая механика» — раздел, в котором излагаются основные законы движения твердых тел и их взаимодействия. В разделе «Сопротивление материалов» изучаются основы прочности материалов и методы расчетов элементов конструкций на прочность, жесткость и устойчивость под действием внешних сил. В заключительном разделе «Технической механики» «Детали машин» рассматриваются основы конструирования и расчета деталей и сборочных единиц общего назначения.
Дисциплина «Техническая механика» является общепрофессиональной, обеспечивающей базовые знания при усвоении специальных дисциплин, изучаемых в дальнейшем.
Задачи теоретической механики
Для удобства изучения теоретическую механику подразделяют на статику, кинематику и динамику. Статика изучает условия равновесия тел под действием сил. Кинематика рассматривает движение тел как перемещение в пространстве; характеристики тел и причины, вызывающие…Аксиомы статики
В результате обобщения человеческого опыта были установлены общие закономерности механического движения, выраженные в виде законов и теорем. Все теоремы и уравнения статики выводятся из нескольких исходных положений. Эти положения называют аксиомами статики.
Первая аксиома
Под действием уравновешенной системы сил абсолютно твердое тело или материальная точка находятся в равновесии или движутся равномерно и прямолинейно (закон инерции).
Вторая аксиома
Две силы, равные по модулю и направленные по одной прямой в разные стороны, уравновешиваются (рис. 1.2).
Р,=Р2
Третья аксиома
Р,=Р2 Р,=Р.Пятая аксиома
При взаимодействии тел всякому действию соответствует равное и противоположно направленное противодействие (рис. 1.5).
Силы действующие и противодействующие всегда приложены к разным телам, поэтому они не уравновешиваются .
Силы, с которыми два тела действуют друг на друга, всегда равны по модулю и направлены вдоль одной прямой в разные стороны.
Следствие из второй и третьей аксиом
Сила F приложена в точке А. Требуется перенести ее в точку В. Используя… (F';F"). Образуется уравновешенная по второй аксиоме система сил (F;F"). Убираем ее и получим в точке В…Связи и реакции связей
Все тела делятся на свободные и связанные. Свободные тела — тела, перемещение которых не ограничено. Связанные тела — тела, перемещение которых ограничено другими телами.Жесткий стержень
Стержень может быть сжат или растянут. Реакция стержня направлена вдоль… Возможным перемещением точки называет? такое бесконечно малое мысленное перемещение, которое допускается в данный…Шарнирная опора
Шарнир допускает поворот вокруг точки закрепления. Различают два вида шарниров.
Подвижный шарнир
Стержень, закрепленный на шарнире, может поворачиваться вокруг шарнира, а точка крепления может перемещаться вдоль направляющей (площадки) (рис. 1.10).
Реакция подвижного шарнира направлена перпендикулярно опорной поверхности, т. к. не допускается только перемещение поперек опорной поверхности.
Неподвижный шарнир
неизвестна по направлению. Ее принято изображать в виде двух составляющих: горизонтальной и вертикальной (Rx; Rу) (рис. 1.11). Защемление или «заделка» Любые перемещения точки крепления невозможны.R = Rх + Rу.
ЛЕКЦИЯ 2
Тема 1.2. Плоская система сходящихся сил.
Определение равнодействующей геометрическим способом
Знать геометрический способ определения равнодействующей системы сил, условия равновесия плоской системы сходящихся сил.
Уметь определять равнодействующую, решать задачи на равновесие в геометрической форме.
Плоская система сходящихся сил
Необходимо определить равнодействующую системы сходящихся сил (F1; F2; F3;... ...; Fn ) п — число сил, входящих в систему. По следствию из аксиом статики, все силы системы можно переместить вдоль…Равнодействующая сходящихся сил
Используя свойства векторной суммы сил, можно получить равнодействующую любой… Вектор равнодействующей силы соединит начало первого вектора с концом последнего.Порядок построения многоугольника сил
1. Вычертить векторы сил заданной системы в некотором масштабе один за другим так, чтобы конец предыдущего вектора совпадал с началом последующего.
2. Вектор равнодействующей замыкает полученную ломаную линию; он соединяет начало первого вектора с концом последнего и направлен ему навстречу.
3. При изменении порядка вычерчивания векторов в многоугольнике меняется вид фигуры. На результат порядок вычерчивания не влияет.
Условие равновесия плоской системы сходящихся сил
Если плоская система сходящихся сил находится в равновесии, многоугольник сил этой системы должен быть замкнут. Если в системе три силы, образуется треугольник сил. Сравните два треугольника сил (рис. 2.4) и сделайте вывод о количестве сил, входящих в каждую систему.Решение задач на равновесие геометрическим способом
Порядок решения задач: 1. Определить возможное направление реакций связей. 2. Вычертить многоугольник сил системы, начиная с известных сил в некотором масштабе. (Многоугольник должен быть…Решение
Определяем возможные направления реакций связей «жесткие стержни». Усилия направлены вдоль стержней.Тема 1.2. Плоская система сходящихся сил.
Определение равнодействующей аналитическим способом
Знать аналитический способ определения равнодействующей силы, условия равновесия плоской сходящейся системы сил в аналитической форме. Уметь определять проекции силы на две взаимно перпендикулярные оси решать задачи на равновесие в аналитической форме.
Проекция силы на ось
Проекция силы на ось определяется отрезком оси, отсекаемым перпендикулярами, опущенными на ось из начала и конца вектора (рис. 3.1).Определение равнодействующей системы
Сил аналитическим способом
Модуль (величину) равнодействующей можно найти по известным проекциям:Условия равновесия плоской системы
Сходящихся сил в аналитической форме
Исходя из того, что равнодействующая равна нулю, получим: Условия равновесия в аналитической форме можно сформулировать следующим образом:Тема 1.3. Пара сил и момент силы относительно точки
Знать обозначение, модуль и определение моментов пары сил и силы относительно точки, условия равновесия системы пар сил.
Уметь определять моменты пар сил и момент силы относительно точки, определять момент результирующей пары сил.
Пара сил, момент пары сил
Рассмотрим систему сил (Р; Б"), образующих пару. Пара сил вызывает вращение тела и ее действие на тело оценивается моментом.… Их действие на тело не может быть заменено одной силой (равнодействующей).Момент силы относительно точки.
Сила, не проходящая через точку крепления тела, вызывает вращение тела относительно точки, поэтому действие такой силы на тело оценивается… Момент силы относительно точки численно равен произведению модуля силы на… Обозначение момента Мо(F) или то(F)',Тема 1.4. Плоская система произвольно расположенных сил
Иметь представление о главном векторе, главном моменте, равнодействующей плоской системы произвольно расположенных сил.
Знать теорему Пуансо о приведении силы к точке, приведение произвольной плоской системы сил к точке, три формы уравнений равновесия.
Уметь заменять произвольную плоскую систему сил одной силой и одной парой.
Теорема Пуансо о параллельном переносе сил
Дано: сила в точке А (рис. 5.1). Добавим в точке В уравновешенную систему сил (F'; F"). Образуется пара сил (F; F"}. Получим силу в точке В…Приведение к точке плоской системы произвольно
Расположенных сил
Появившиеся при переносе пары называют присоединенными парами. Дана плоская система произвольно расположенных сил (рис. 5.2). Переносим все силы в точку О. Получим пучок сил в точке О, который можно заменить одной силой — главным вектором…Влияние точки приведения
Величина главного момента при переносе точки приведения изменится, т. к. меняются расстояния от векторов-сил до новой точки приведения. С помощью теоремы Вариньона о моменте равнодействующей можно определить точку… Эту силу называют равнодействующей системы сил.Частные случаи приведения системы сил к точке
При приведении системы сил к точке возможны следующие варианты:
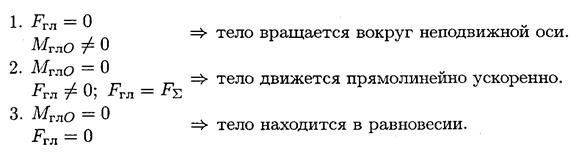
тело вращается вокруг неподвижной оси. тело движется прямолинейно ускоренно, тело находится в равновесии.
Условие равновесия произвольной
Плоской системы сил
Аналитическое определение главного вектора приводит к выводу: где Fkx и Fky — проекции векторов на оси координат.Тема 1.4. Балочные системы.
Определение реакций опор и моментов
Защемления
Иметь представление о видах опор и возникающих реакциях в опорах.
Знать три формы уравнений равновесия и уметь их использовать для определения реакций в опорах балочных систем. Уметь выполнять проверку правильности решения.
Виды нагрузок и разновидности опор
Виды нагрузок
Часто нагрузка распределена по значительной площадке или линии (давление воды на плотину, давление снега на крышу и т.п.), тогда нагрузку считают… В задачах статики для абсолютно твердых тел распределенную нагрузку можно…Момент силы относительно оси
MOO(F) = пр F a а — расстояние от оси до проекции F;Пространственная сходящаяся система сил
Вектор в пространстве
Модуль вектора может быть получен из зависимостиПространственная сходящаяся система сил
Равнодействующую пространственной системы сил можно определить, построив пространственный многоугольник (рис. 7.3), FΣ = F1+ F2 + F3 +……+ Fn Доказано, что равнодействующая системы сходящихся сил приложена в точке пересечения линий действия сил системы.Произвольная пространственная система сил
Приведение произвольной пространственной системы сил к центру О
Силы необходимо параллельно перемещать, при этом образуется система пар сил. Момент каждой из этих пар равен произведению модуля силы на расстояние… В центре приведения возникает пучок сил, который может быть заменен суммарной… Моменты пар сил можно сложить, получив суммарный момент системы Мгл (главный момент).Сила тяжести
Сила тяжести — равнодействующая сил притяжения к Земле, она распределена по всему объему тела. Силы притяжения, приложенные к частицам твердого тела, образуют систему сил, линии действия которых сходятся в центре Земли (рис. 8.1). Поскольку радиус Земли значительно больше размеров любого земного тела, силы притяжения можно считать параллельными.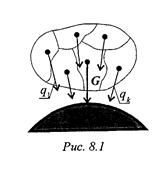
Точка приложения силы тяжести
Для определения точки приложения силы тяжести (равнодействующей параллельных сил) используем теорему Вариньона о моменте равнодействующей:
Момент равнодействующей относительно оси равен алгебраической сумме моментов сил системы относительно этой оси.
Изображаем тело, составленное из некоторых частей, в пространственной системе координат (рис. 8.2).
Тело состоит из частей, силы тяжести которых ^^ приложены в центрах тяжести (ЦТ) этих частей.Пусть равнодействующая (сила тяжести всего тела) приложена в неизвестном пока центре С.
Хc, Ус и Zс — координаты центра тяжести С.
Хk, уk и zk — координаты центров тяжести частей тела
Из теоремы Вариньона следует:
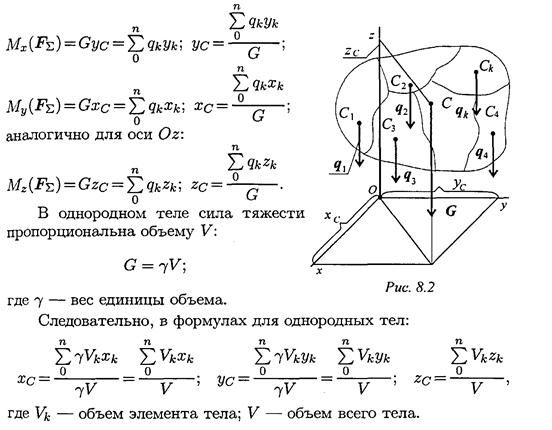
Центр тяжести однородных плоских тел
Очень часто приходится определять центр тяжести различных плоских тел и геометрических плоских фигур сложной формы. Для плоских тел можно записать:… Тогда после подстановки в записанные выше формулы получим:Определение координат центра тяжести плоских фигур
Центр тяжести стержня находится на середине высоты. Положения центров тяжести простых геометрических фигур могут быть рассчитаны по известным… При решении задач используются следующие методы:Тема 1.7. Основные понятия кинематики.
Кинематика точки
Знать обозначения, единицы измерения, взаимосвязь кинематических параметров движения, формулы для определения скоростей и ускорений (без вывода). … Кинематика рассматривает движение как перемещение в пространстве. Причины,…Основные кинематические параметры
Траектория
Линию, которую очерчивает материальная точка при движении в пространстве, называют траекторией.
Траектория может быть прямой и кривой, плоской и пространственной линией.
Уравнение траектории при плоском движении: у = f(х).
Пройденный путь
единицы измерения — метры. Уравнение движения точки : Уравнение, определяющее положение движущейся точки в зависимости от времени, называется уравнением движения.Положение…Скорость движения
Скорость — вектор, в любой момент направленный по касательной к траектории в сторону направления движения (рис. 9.3). Если точка за равные промежутки времени проходит равные расстояния, то… Средняя скорость на пути ΔS определяется какУскорение точки
Скорость точки при перемещении из точки М1 в точку М2 меняется по величине и направлению. Среднее значение ускорения этот промежуток времени При рассмотрении бесконечно малого промежутка времени средне ускорение превратится в ускорение данный момент:Тема 1.8. Кинематика точки
Иметь представление о скоростях средней и истинной, об ускорении при прямолинейном и криволинейном движениях, о различных видах движения точки.
Знать формулы (без вывода) и графики равномерного и равнопеременного движений точки. Уметь определять параметры движения точки по заданному закону движения, строить и читать кинематические графики.
Анализ видов и кинетических параметров движений
Равномерное движение
v = const. Для прямолинейного равномерного движения (рис. 10.1 а)Равнопеременное движение
Равнопеременное движение — это движение с постоянным касательным ускорением: at = const. Для прямолинейного равнопеременного движенияНеравномерное движение
При неравномерном движении численные значения скорости и ускорения меняются.
Уравнение неравномерного движения в общем виде представляет собой уравнение третьей S = f(t3) и выше степени.
Кинематические графики
Кинематические графики — это графики изменения пути, скорости и ускорений в зависимости от времени.
Равномерное движение (рис. 10.3)

Равнопеременное движение (рис. 10.4)

Определение скорости и ускорения точки при координатном способе задания ее движения
Если движение точки задано в координатной форме, то каждое параметрическое уравнений , взятое отдельно, описывает движение не самой точки, а ее проекции вдоль соответствующих осей. Пусть движение точки А в плоской системе координат задано уравнениями
х =f1 (t) и у =f2 (t).
Первое из уравнений определяет закон изменения абсциссы х движущейся точки (рис. 1.118), т. е. описывает движение по оси абсцисс точки Ах — проекции точки А на ось х. Второе уравнение определяет закон изменения ординаты у точки А, т. е. описывает движение по оси ординат ее проекции Ау на эту ось. Допустим, что в данный момент времени t точка А имеет скорость v , тогда Ах и А у — проекции точки на оси х и у—движутся по осям со скоростями vх и vу, модули которых равны проекциям скорости v на соответствующие оси (рис. 10.5). Следовательно, дифференцируя каждое из заданных уравнений, найдем модули скоростей vx и vу или, иначе говоря, проекции скорости v на оси координат.
Итак,
vx = dx/dt =f'(t) и vy = dy/dt = f'(t). (1.100)

Рис 10.5
Если из начала и конца вектора v провести прямые, параллельные осям координат, то получим прямоугольный треугольник с гипотенузой v и катетами vх и vy . Отсюда модуль искомой скорости
 (1.101)
(1.101)
Направление скорости v, т. е. углы αх или αу , находим по одной из следующих формул:

Аналогично определяется и вектор ускорения а. Сначала находим его проекции на оси х и у:
ах = dvx/dt =f"(t) и ау = dvу /dt =f"(t), (1.105)
а затем модуль
 (1.106)
(1.106)
и направление, т. е. углы βх и βy (угол βу на рис. 1.118 не обозначен):
От координатного способа задания движения точки нетрудно перейти к естественному способу. Ранее мы рассмотрели , что, исключив время из уравнений движения х =f1 (t),
у =f2 (t), получаем уравнение траектории Ф (х, у) = 0. Уравнение движения S =f(t) по этой траектории получаем следующим образом. Так как v = dS / dt то dS = v dt; подставив сюда значение полученное из уравнений движения в
осях координат, и проинтегрировав:
 (1.108)
(1.108)
получим уравнения движения вида S =f(t).
Например, если движение точки задано уравнениями х = 3t2 и у = 4t2, то точка движется по прямолинейной траектории, уравнение которой 4x – 3y = 0.
Из заданных уравнений движения следует, что проекции скорости на оси координат
VX = 6t Vу = 8t ,
а модуль скорости в любой момент времени

Из уравнения (1.108)

Таким образом, точка движется прямолинейно по траектории 4х— 3y = 0 согласно уравнению S = 5t2.
ЛЕКЦИЯ 11
Тема 1.9. Простейшие движения твердого тела
Иметь представление о поступательном движении, его особенностях и параметрах, о вращательном движении тела и его параметрах. Знать формулы для определения параметров поступательного и вращательного движений тела.
Уметь определять кинематические параметры тела при поступательном и вращательном движениях, определять параметры любой точки тела.
Поступательное движение
При поступательном движении все точки тела движутся одинаково: скорости и ускорения в каждый момент одинаковы. Поэтому для описания движения тела… Поступательное движение может быть прямолинейным и криволинейным.Вращательное движение
Неподвижная ось, вокруг которой вращаются все точки тела, называется осью вращения. При этом каждая точка движется по окружности, радиус которой равен расстоянию… Для описания вращательного движения тела вокруг неподвижной оси можно использовать только угловые параметры (рис.…Частные случаи вращательного движения
ω =const Уравнение (закон) равномерного вращения в данном случае имеет вид: φ =φ0 + ωtСкорости и ускорения точек вращающегося тела
Тело вращается вокруг точки О. Определим параметры движения точки A , расположенной на расстоянии RA от оси вращения (рис. 11.6, 11.7). Путь точки А: SA = φRA Линейная скорость точки А: vA = ωRaРешение
2. Участок 2 — скорость постоянна — движение равномерное, . ω = const 3. Участок 3 — скорость убывает равномерно — равнозамедленное движение,Тема 1.10. Сложное движение точки.
Сложное движение твердого тела
Иметь представление о системах координат, об абсолютном, относительном и переносном движениях. Знать разложение сложного движения на относительное и переносное, теорему сложения скоростей. Знать разложение плоскопараллельного движения на поступательное и вращательное, способы определения мгновенного центра скоростей.
Основные определения
Для рассмотрения сложного движения точки выбирают две системы отсчета: подвижную и неподвижную. Движение точки (тела) относительно неподвижной системы отсчета называют… Подвижную систему отсчета обычно связывают с движущимся телом. Движение подвижной системы отсчета относительно…Плоскопараллельное движение твердого тела
Плоскопараллельное движение мож-но изучать, рассматривая любое плоское сечение тела, параллельное неподвижной плоскости, называемой основной (рис.… Все точки тела, расположенные на прямой, перпендикулярной к основной плоскости, движутся одинаково.Метод разложения сложного движения на
Поступательное и вращательное
Разложение используют для определения скорости любой точки тела, применяя теорему о сложении скоростей (рис. 12.2). Точка А движется вместе с точкой В, а затем поворачивается вокруг В с угловой скоростью ω , тогда абсолютная…Метод определения мгновенного
Центра скоростей
Задача сводится к определению положения мгновенного центра 1 вращений (скоростей) (рис. 12.4). Мгновенным центром скоростей (МЦС) является точка на плоскости, абсолютная скорость которой в данный момент равна…Тема 1.12. Основные понятия и аксиомы динамики.
Понятие о трении
Иметь представление о массе тела и ускорении свободного падения, о связи между силовыми и кинематическими параметрами движения, о двух основных задачах динамики. Знать аксиомы динамики и математическое выражение самого закона динамики. Знать зависимости для определения силы трения.
Содержание и задачи динамики
Динамика — раздел теоретической механики, в котором устанавливается связь между движением тел и действующими на них нами. В динамике решают два типа задач:
— определяют параметры движения по заданным силам;
— определяют силы, действующие на тело, по заданным кинематическим параметрам движения.
При поступательном движении все точки тела движутся одинаково, поэтому тело можно принять за материальную точку. Если размеры тела малы по сравнению с траекторией, его тоже можно рассматривать как материальную точку, при этом точка падает с центром тяжести тела.
При вращательном движении тела точки могут двигаться неодинаково, в этом случае некоторые положения динамики можно применять только к отдельным точкам, а материальный объект рассматривать как совокупность материальных точек.
Поэтому динамику делят на динамику точки и динамику материальной системы.
Аксиомы динамики
Первая аксиома (принцип инерции) Всякая изолированная материальная точка находится в состоянии покоя или равномерного и прямолинейного движения, пока…Понятие о трении. Виды трения
Трение скольжения Причина — механическое зацепление выступов. Сила сопротивления движению при…Трение качения
Обычно считают грунт мягче колеса, тогда в основном деформируется грунт, и в каждый момент колесо должно перекатываться через выступ грунта. Для… Условие качения колеса состоит в том, что движущийся момент должен быть не меньше момента сопротивления:Тема 1.13. Движение материальной точки.
Метод кинетостатики
Иметь представление о свободных и несвободных материальных точках, о силах инерции, об использовании силы инерции для решения технических задач. Знать формулы для расчета силы инерции при поступательном и вращательном движениях, знать принцип Даламбера и уметь определять параметры движения с использованием законов динамики и метода кинетостатики.
Свободная и несвободная точки
Материальные точки, движение которых ограничено связями, называются несвободными. Для несвободных точек необходимо определять реакции связей. Эти точки движутся… Несвободные материальные точки освобождаются от связей: связи заменяются их реакциями. Далее несвободные точки можно…Сила инерции
Сила инерции — сила, возникающая при разгоне или торможении тела (материальной точки) и направленная в обратную сторону от ускорения. Силу инерции… Рассчитано, что сила инерции равна Fин = | m*a|Порядок решения задач с использованием принципа
Даламбера
1. Составить расчетную схему.
2. Выбрать систему координат.
3. Выяснить направление и величину ускорения.
4. Условно приложить силу инерции.
5. Составить систему уравнений равновесия.
6. Определить неизвестные величины.
Примеры решений задач
Пример 1.Рассмотрим движение платформы по шероховатой поверхности с ускорением (рис. 14.4).
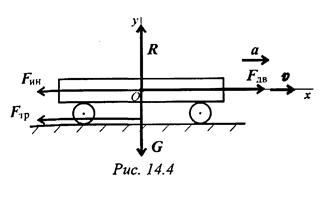
Решение
где .Fдв — движущая сила;Тема 1.14. Работа и мощность
Иметь представление о работе силы при прямолинейном и криволинейном перемещениях, о мощности полезной и затраченной, о коэффициенте полезного действия.
Знать зависимости для определения силы трения, формулы для расчета работы и
мощности при поступательном и вращательном движениях.
Уметь рассчитывать работу и мощность с учетом потерь на трение и сил инерции.
Работа
Для характеристики действия силы на некотором перемещении точки ее приложения вводят понятие «работа силы».
Работа служит мерой действия силы, работа — скалярная величина.
Работа постоянной силы на прямолинейном пути
Работа силы в общем случае численно равна произведению модуля силы на длину пройденного пути и на косинус угла между направлением силы и направлением перемещения (рис. 15.1):

W = FS cos α
Единицы измерения работы:
1 Дж (джоуль) 1 Н-м;
1 кДж (килоджоуль) — 103 Дж.
Рассмотрим частные случаи.
1. Силы, совпадающие с направлением перемещения, называются движущими силами. Направление вектора силы совпадает с направлением перемещения (рис. 15.2).
В этом случае α = 0° (соs α = 1). Тогда W = FS > 0.
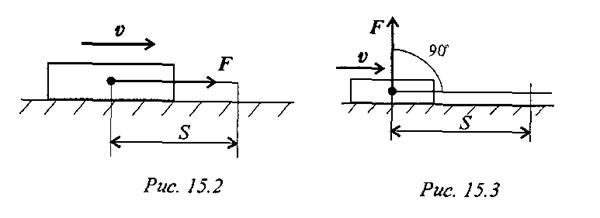
2. Силы, перпендикулярные направлению перемещения, работы не производят (рис. 15.3).
Сила F перпендикулярна направлению перемещения, α = 90° (соs α = 0); W = 0.
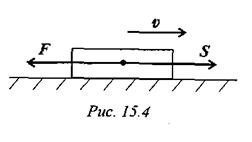
3. Силы, направленные в обратную от направления перемещения сторону, называются силами сопротивления (рис. 15.4).
Сила F направлена в обратную от перемещения S сторону.
В этом случае α = 180° (соs α = —1), следовательно, W = —FS < 0.
Движущие силы увеличивают модуль скорости, силы сопротивления уменьшают скорость.
Таким образом, работа может быть положительной и отрицательной в зависимости от направления силы и скорости.
Работа постоянной силы на криволинейном пути
Пусть точка М движется по дуге окружности и сила F составляет некоторый угол а с касательной к окружности (рис. 15.5).
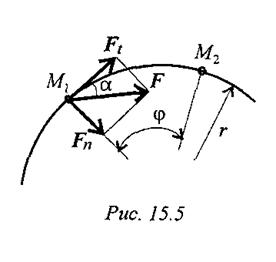
Вектор силы можно разложить на две составляющие
F = Ft + Fn
Используя принцип независимости действия сил, определим работу каждой из составляющих силы отдельно:
W(Ft) = Ft ΔŠ ; W(Fn) = Fn ΔŠ
где ΔŠ = M1Μ2 — пройденный путь.,
ΔŠ = φr
Нормальная составляющая силы Fп всегда направлена перпендикулярно перемещению и, следовательно, работы не производит:
W (Fп) = 0.
При перемещении по дуге обе составляющие силы разворачиваются вместе с точкой М. Таким образом, касательная составляющая силы всегда совпадает по направлению с перемещением.
Будем иметь: W(Ft) = Ft φr.
Касательную силу Ft обычно называют окружной силой.
Работа при криволинейном пути — это работа окружной силы:
W(F) = W(Ft)
Произведение окружной силы на радиус называют вращающим
моментом:
Мвр = Ft r
Работа силы, приложенной к вращающемуся телу, равна произведению вращающего момента на угол поворота:
W(F) = Mврφ
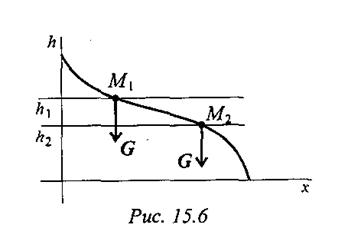
Работа силы тяжести
Работа силы тяжести зависит только от изменения высоты и равна произведению модуля сипы тяжести на вертикальное перемещение точки (рис. 15.6):
W(G) = G(h1 – h2) = G Δh
где Δh — изменение высоты.
При опускании работа положительна, при подъеме отрицательна.
Работа равнодействующей силы
В случае движения под действием системы сил пользуются теоремой о работе равнодействующей. Работа равнодействующей на некотором перемещении равна алгебраической сумме работ системы сил на том жеперемещенииТема 1.14. Работа и мощность. Коэффициент полезного действия
Иметь представление о мощности при прямолинейном и криволинейном перемещениях, о мощности полезной и затраченной, о коэффициенте полезного действия.
Знать зависимости для определения мощности при поступательном и вращательном движениях, КПД.
Уметь рассчитать мощность с учетом потерь на трение и сил инерции.
Мощность
Мощность — работа, выполненная в единицу времени: Единицы измерения мощности: ватты, киловатты,Мощность при вращении
Тело движется по дуге радиуса из точки М1 в точку М2 М1М2 = φr Работа силыКоэффициент полезного действия
Таким образом, машина (механизм) кроме полезной работы совершает еще и дополнительную работу. Отношение полезной работы к полной работе или полезной мощности ко всей…Тема 1.15. Общие теоремы динамики
Иметь представление о понятиях «импульс силы», «количество движения», «кинетическая энергия», о системе материальных точек, о внутренних и внешних силах системы.
Знать основные теоремы динамики, основные уравнения динамики при поступательном и вращательном движениях твердого тела, формулы для расчета моментов инерции некоторых однородных твердых тел.
Уметь определять параметры движения с помощью теорем динамики.
Теорема об изменении количества движения
Вектор количества движения совпадает по направлению с вектором скорости. Единица измерения [mv] = кг м/с. Произведение постоянного вектора силы на некоторый промежуток времени, в течение которого действует эта сила,…Теорема об изменении кинетической энергии
Существуют две формы механической энергии: потенциальная энергия, или энергия положения, и кинетическая энергия, или энергия движения. Потенциальная энергия (П) определяет способность тела совершать работу при… П = Gh,Основы динамики системы материальных точек
Любое материальное тело в механике рассматривается как механическая система, образуемая совокупностью материальных точек. Из определения механической системы следует, что движение каждой из точек,… Силы, действующие на точки системы, делятся на внешние и внутренние. Силы взаимодействия между точками этой системы…Основное уравнение динамики при поступательном движении тела
Для определения движения тела (системы материальных точек) можно использовать второй закон динамики
FΣ = тас,
где т — суммарная масса тела; ас — ускорение центра масс тела.
В поле земного притяжения центр масс совпадает с центром тяжести.
Основное уравнение динамики вращающегося тела
Рассматривая твердое тело как механическую систему, разобьем ее на множество… с касательным ускорениемНапряжения
Величину интенсивности внутренних сил в точке поперечного сечения называют ме-ханическим напряжением. Напряжение характеризует величину внутренней… Рассмотрим брус, к которому приложена внешняя нагрузка (рис. 19.2). С помощью… Направление напряжения рср совпадает с направлением внутренней силы в этом сечении.Внутренние силовые факторы, напряжения. Построение эпюр
Знать правила построения эпюр продольных сил и нормальных напряжений, закон распределения нормальных напряжений в поперечном сечении бруса. Уметь строить эпюры продольных сил и нормальных напряжений Растяжение и сжатиеПримеры построения эпюры
Продольных сил
Делим брус на участки нагружения. Участком нагружения считают часть бруса между внешними силами. На… Воспользуемся методом сечений и определим внутренние силовые факторы внутри каждого участка.Геометрические характеристики плоских сечений
Знать формулы моментов инерции простейших сечений, способы вычисления моментов инерции при параллельном переносе осей. При растяжении, сжатии, смятии и сдвиге деталь сопротивляется деформации всем… При кручении и изгибе сечение сопротивляется деформации не одинаково, при расчетах напряжений появляются другие…Статический момент площади сечения
Если разбить сечение на бесконечно малые площадки dA и умножить каждую площадку на расстояние до оси координат и проинтегрировать полученное… 1) относительно оси Ох; Рис. 25.1 2) относительно оси ОуЦентробежный момент инерции
Центробежный момент инерции может быть положительным, отрицательным и равным нулю. Центробежный момент инерции относительно осей, проходящих через… Оси, относительно которых центробежный момент равен нулю, Называются главными.…Осевые моменты инерции
1) осевой момент инерции сечения относительно оси ОхПолярный момент инерции сечения
где р — расстояние до полюса (центра поворота) (рис. 25.1). Поскольку ρ2 = х2 + у2, получим: полярный момент инерции сечения равен…Моменты инерции простейших сечений
Представим прямоугольник высотой h и шириной b в виде сечения, составленного из бесконечно тонких полос. Запишем площадь такой полосы:. bdy = dA.… Рис. 25. 2 По аналогии, если разбить прямоугольник на вертикальные полосы, рассчитать площади полос и подставить в формулу для…Полярный момент инерции круга
Площадь каждого кольца можно рассчитать как площадь прямоугольника с длинной стороной, равной длине соответствующей окружности, и высотой, равной… dA = 2πρ dρ. Подставим это выражение для площади в формулу для полярного момента инерции:Тема 2.5. Кручение. Внутренние силовые факторы при кручении.
Построение эпюр крутящих моментов
Иметь представление о деформациях при кручении, о внутренних силовых факторах при кручении. Уметь строить эпюры крутящих моментов.
Деформации при кручении
Длина бруса и размеры поперечного сечения при кручении не изменяются. Рис. 26.1Гипотезы при кручении
дикулярное продольной оси, после деформацииостается плоским и перпендикулярным продольной оси. 2. Радиус, проведенный из центра поперечного сечения бруса, после деформации остаетсяВнутренние силовые факторы при кручении
Внешними нагрузками также являются две противоположно направленные пары сил. Рассмотрим внутренние силовые факторы при кручении круглого бруса (рис.… Для этого рассечем брус плоскостью I и рассмотрим равновесие отсеченной части (рис. 26.1а). Сечение рассматриваем со…Эпюры крутящих моментов
Крутящий момент считаем положительным, если моменты внешних пар сил направлены по часовой стрелке, в этом случае момент внутренних сил упругости…Тема 2.5. Кручение. Напряжения и деформации
При кручении
 Иметь представление о напряжении и деформациях при кручении, о моменте сопротивления при кручении.
Иметь представление о напряжении и деформациях при кручении, о моменте сопротивления при кручении.
Знать формулы для расчета напряжений в точке поперечного сечения, закон Гука при кручении.
Напряжения при кручении
Рис. 27.1а деформации (рис. 27.1а). Поперечные окружности, оставаясь плоскими,… Рис. 27.1Максимальные напряжения при кручении
Определим максимальное напряжение, учитывая, что ρmах = = d/2, где d — диаметр бруса круглого сечения. Для круглого сечения полярный момент инерции рассчитывается по формуле .Условие прочности при кручении
Разрушение бруса при кручении происходит с поверхности, при расчете на прочность используют условие прочности

где [τк] — допускаемое напряжение кручения.
Виды расчетов на прочность
1. Проектировочный расчет — определяется диаметр бруса (вала) в опасном сечении: ОткудаРасчет на жесткость
При кручении деформация оценивается углом закручивания: . Здесь φ — угол закручивания; γ— угол сдвига; l — длина бруса; R — радиус; R = d/2. ОткудаТема 2.6. Изгиб. Классификация видов изгиба. Внутренние силовые факторы при изгибе
Иметь представление о видах изгиба и внутренних силовых факторах.
Знать методы для определения внутренних силовых факторов и уметь ими пользоваться для определения внутренних силовых факторов при прямом изгибе.
Основные определения
изгиб, называют балкой. Изображен брус, закрепленный справа (за-щемление), нагруженный внешними… Плоскость, в которой расположены внешние силы и моменты, называют силовой плоскостью.Если все силы лежат в одной…Внутренние силовые факторы при изгибе
Рассмотрим равновесие участка 1 (рис. 29.36). Под действием внешней пары сил участок стремится развернуться по часовой… Продольные силы упругости выше оси бруса направлены направо, а силы ниже оси направлены налево. Таким образом, при…Принятые в машиностроении знаки поперечных сил и
Изгибающих моментов
Знаки изгибающих моментов Если действующие на участке внешние силы стремятся изогнуть балку выпуклостью вниз, то изгибающий момент считается…Выводы
При чистом изгибе в поперечном сечении балки возникает только изгибающий момент, постоянный по величине.
При поперечном изгибе в сечении возникает изгибающий момент и поперечная сила.
Изгибающий момент в произвольном сечении балки численно равен алгебраической сумме моментов всех внешних Рис. 29.5
сил, приложенных к отсеченной части, относительно рассматриваемого сечения.
Поперечная сила в произвольном сечении балки численно равна алгебраической сумме проекций всех внешних сил, действующих на отсеченной части на соответствующую ось.
Пример 2.На балку действует пара сил с моментом m и распределенная нагрузка интенсивностью q. Балка защемлена справа (рис. 29.6).
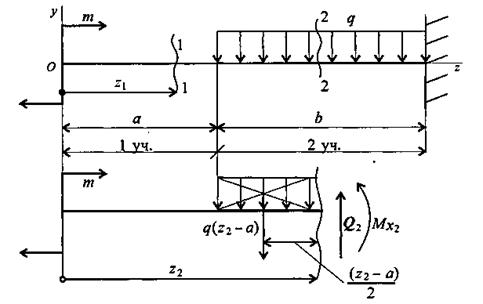
Рис. 29.6
Рассечем балку на участке 1 на расстоянии z1 от левого края. Рассмотрим равновесие отсеченной части. Из уравнения ΣMх1 = 0 получим:
т — Мx1 = 0; Mx1 = m = const.
Участок 1 — участок чистого изгиба.
Рассечем балку на участке 2 на расстоянии z2 > а от края, z2 — расстояние сечения от начала координат.
Из уравнения ΣFy = 0 найдем поперечную силу Q2 . Заменяем распределенную нагрузку на рассматриваемом участке равнодействующей силой q(z2 — а).
ΣFy = - q(z2 — а) + Q2 = 0; Q2 = q(z2 — а)
Из уравнения моментов определяем изгибающий момент в сечении:

На втором участке возникает поперечный изгиб.
Выводы
При действии распределенной нагрузки возникает поперечная сила, линейно зависящая от координаты сечения.
Изгибающий момент на участке с распределенной нагрузкой меняется в зависимости от координаты сечения по параболическому закону.
Дифференциальные зависимости при прямом поперечном изгибе
Поперечная сила равна производной от изгибающего момента по длине балки: Интенсивность "равномерно распределенной нагрузки равна производной от поперечной силы по длине балки:Внутренних силовых Q1= F1 – F2.
Факторов при изгибе
Методом сечения Полученное выражение можно обобщить
Q = ΣFi Поскольку речь идет об алгебраической сумме, в которой необходимо учитывать…Поперечный изгиб. Внутренние силовые факторы.
Напряжения
В поперечном сечении возникает изгибающий момент, меняющийся по длине балки,… Рассмотрим участок балки длиной dz (рис. 33.16).Тема 2.7. Сочетание основных деформаций. Гипотезы прочности
Иметь представление о напряженном состоянии в точке упругого тела, о теории предельных напряженных состояний, об эквивалентном напряженном состоянии, о гипотезах прочности.
Знать формулы для эквивалентных напряжений по гипотезам наибольших касательных напряжений и энергии формоизменения.
Напряженное состояние в точке
Положения теории напряженного состояния: 1. Напряженное состояние в данной точке полностью определено, если известны… 2. Среди множества площадок, которые можно провести через данную точку, есть три такие взаимно перпендикулярные…Понятие о сложном деформированном состоянии
Сложное деформированное состояние возникает, если деталь одновременно подвергается нескольким простейшим нагружениям. Такие состояния возникают в заклепочных соединениях (срез и смятие), в… Часто одним из нагружений (незначительным) пренебрегают.Расчет круглого бруса на изгиб с кручением
Рис. 34.3Тема 2.10. Устойчивость сжатых стержней. Основные положения
Иметь представление об устойчивых и неустойчивых формах равновесия, критической силе и коэффициенте запаса устойчивости, о критическом напряжении, гибкости стержня и предельной гибкости.
Знать условие устойчивости сжатых стержней, формулу Эйлера и эмпирические формулы для расчета критической силы и критического напряжения.
Понятие об устойчивом и неустойчивом равновесии
Равновесие считают устойчивым, если за счет сил упругости после снятия внешней отклоняющей силы стержень восстановит первоначальную форму (рис.… Если упругое тело после отклонения от равновесного положения не возвращается… Потерю устойчивости под действием центрально приложенной продольной сжимающей силы называют продольным изгибом.Расчет на устойчивость
где F — действующая сжимающая сила; [F] — допускаемая сжимающая сила, обеспечивает некоторый запас устойчивости;Способы определения критической силы
Расчет по формуле Эйлера
Л. Эйлер в 1744 г. Для шарнирно закрепленного с обеих сторон стержня (рис. 36.2) формула Эйлера…Критические напряжения.
Напряжение от сжимающей силы определяется по формуле где сгкр — напряжение сжатия, при котором стержень еще устойчив. Корень квадратный из отношения минимального момента…Пределы применимости формулы Эйлера
Таким образом, критическое напряжение должно быть меньше предела упругости материала. Предел упругости при расчетах можно заменять пределом пропорциональности. Таким образом,, где σу — предел…– Конец работы –
Используемые теги: Теоретическая, Механика0.049
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: Теоретическая механика
Что будем делать с полученным материалом:
Если этот материал оказался полезным для Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.126 сек.
Новости и инфо для студентов