рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Менеджмент
- /
- ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Реферат Курсовая Конспект
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ - раздел Менеджмент, Министерство Образования И Науки Российской Федерации ...
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ
РОССИЙСКОЙ ФЕДЕРАЦИИ
Кубанский государственный технологический университет
А.В.Нестеров, С.В.Нестеров
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Допущено Учебно-методическим объединением вузов по образованию в области… "Автоматизированные технологии и производства"ОГЛАВЛЕНИЕ
Предисловие.................................................................................... 6
Введение.......................................................................................... 7
1 ОСНОВНЫЕ ПОНЯТИЯ.......................................................... 10
1.1 Понятие об автоматическом управлении..................................... 10
1.2 Принципы автоматического управления..................................... 11
1.2.1 Понятие о принципе управления................................................. 11
1.2.2 Принцип управления по отклонению (по ошибке)..................... 11
1.2.3 Принцип управления по возмущению (принцип компенсации возмущения) 12
1.2.4 Принцип комбинированного управления................................... 12
1.3 Примеры промышленных систем управления............................ 13
1.3.1 САР температуры......................................................................... 13
1.3.2 САР угловой скорости ДПТ......................................................... 17
1.4 Функциональная схема типовой одноконтурной САУ............... 18
1.5 Классификация САУ..................................................................... 19
1.6 Задачи теории автоматического управления.............................. 20
Контрольные вопросы.................................................................. 21
2 ЛИНЕЙНЫЕ НЕПРЕРЫВНЫЕ МОДЕЛИ И ХАРАКТЕРИСТИКИ СИСТЕМ УПРАВЛЕНИЯ............................................................................ 22
2.1 Модели "вход-выход"................................................................... 22
2.1.1 Дифференциальные уравнения типовых звеньев и систем......... 22
2.1.1.1 Постановка задачи математического описания линейной САУ. 22
2.1.1.2 Понятие динамического звена...................................................... 22
2.1.1.3 Дифференциальное уравнение динамического звена.................. 23
2.1.1.4 Дифференциальное уравнение САУ............................................ 24
2.1.1.5 Линеаризация дифференциальных уравнений реальных САУ.. 25
2.1.2 Передаточная функция звена и САУ........................................... 25
2.1.2.1 Передаточная функция звена....................................................... 25
2.1.2.2 Передаточные функции типовых звеньев.................................... 27
2.1.2.3 Типовые соединения динамических звеньев................................ 30
2.1.2.4 Структурная схема одноконтурной САУ.................................... 31
2.1.2.5 Передаточные функции САУ....................................................... 32
2.1.2.6 Эквивалентные преобразования структурных схем................... 37
2.1.3 Типовые воздействия.................................................................... 38
2.1.4 ВременнÏе характеристики динамических звеньев и САУ........ 40
2.1.5 Частотные характеристики........................................................... 46
2.1.5.1 Частотные характеристики динамических звеньев...................... 46
2.1.5.2 Логарифмические частотные характеристики............................. 49
2.1.6 Понятие об идентификации.......................................................... 57
2.1.7 Определение временнÏх характеристик...................................... 62
2.1.7.1 Общие сведения............................................................................ 62
2.1.7.2 Классический метод...................................................................... 63
2.1.7.3 Операционный метод.................................................................... 65
2.1.7.4 Численные методы........................................................................ 72
2.1.7.5 Сравнительная характеристика методов решения задач Коши. 76
2.2 Модели "вход-состояние-выход"................................................. 77
2.2.1 Общие сведения............................................................................ 77
2.2.2 Понятие пространства состояний................................................. 77
2.2.3 Описание линейных САУ переменными состояния.................... 79
2.2.4 Канонические формы уравнений состояния................................ 81
2.2.4.1 Общие сведения............................................................................ 81
2.2.4.2 Первая управляемая каноническая форма.................................. 82
2.2.4.3 Управляемое каноническое представление................................. 84
2.2.4.4 Наблюдаемое каноническое представление................................ 88
2.2.4.5 Вторая наблюдаемая каноническая форма................................. 90
2.2.4.6 Каноническая форма Жордана.................................................... 91
2.2.4.7 Понятие о дуальных системах уравнений состояния.................. 93
2.3 Преобразование форм представления моделей.......................... 94
2.3.1 Преобразование уравнений состояния к каноническому виду.. 94
2.3.2 Алгоритм приведения уравнений состояния к первому управляемому представлению.............................................................................. 95
2.3.3 Алгоритм приведения уравнений состояния ко второму управляемому представлению.............................................................................. 96
2.3.4 Определение уравнений состояния по основной передаточной функции 96
2.3.5 Определение передаточной функции по уравнениям состояния 98
2.4 Анализ основных свойств линейных САУ.................................. 99
2.4.1 Анализ устойчивости САУ........................................................... 99
2.4.1.1 Основные понятия......................................................................... 99
2.4.1.2 Критерий устойчивости Рауса-Гурвица.................................... 104
2.4.1.3 Критерий устойчивости Михайлова.......................................... 106
2.4.1.4 Критерий устойчивости Найквиста............................................ 107
2.4.1.5 Оценка запаса устойчивости САУ............................................. 111
2.4.1.6 Понятие об области устойчивости САУ.................................... 112
2.4.2 Анализ инвариантности САУ..................................................... 113
2.4.3 Анализ чувствительности САУ.................................................. 117
2.4.4 Анализ управляемости и наблюдаемости линейных САУ....... 122
2.4.5 Оценка качества переходных процессов................................... 124
2.4.5.1 Основные показатели качества................................................... 124
2.4.5.2 Частотные критерии.................................................................... 127
2.4.5.3 Корневые критерии.................................................................... 129
2.4.5.4 Интегральные критерии............................................................. 131
2.4.6 Анализ точности САУ по величине ошибки............................. 136
Контрольные вопросы................................................................ 138
3 ЗАДАЧИ И МЕТОДЫ СИНТЕЗА САУ................................. 140
3.1 Задачи синтеза САУ................................................................... 140
3.2 Типовые свойства объектов управления.................................... 140
3.3 Типовые законы регулирования (алгоритмы управления)...... 143
3.4 Критерии оптимальной настройки............................................ 146
3.5 Методы синтеза САУ.................................................................. 148
3.6 Метод стандартных коэффициентов.......................................... 149
3.7 Метод корневого годографа...................................................... 161
3.8 Метод расширенных частотных характеристик....................... 169
3.9 Метод синтеза типовых одноконтурных САР с использованием справочных материалов.................................................................................. 174
3.10 Метод синтеза многоконтурных САУ....................................... 177
Контрольные вопросы................................................................ 180
ЗАКЛЮЧЕНИЕ......................................................................... 182
Предметный указатель............................................................... 183
Список литературы..................................................................... 188
ПРЕДИСЛОВИЕ
Учебное пособие соответствует рабочей программе дисциплины "Теория автоматического управления" (ТАУ) специальности 220301 – Автоматизация технологических процессов и производств (в машиностроении) и предназначено для студентов всех форм обучения. Пособие может быть использовано также студентами специальностей 151001 – Технология машиностроения и 151002 – Металлообрабатывающие станки и комплексы.
Учебное пособие издается в двух частях (книгах). Настоящая книга является первой частью и состоит из введения и трех разделов.
Во введении кратко сформулированы место и роль ТАУ в системе общетехнических дисциплин.
Первый раздел включает основные понятия ТАУ, примеры систем автоматического управления (САУ) промышленными объектами, их особенности и классификацию, а также типовые задачи ТАУ.
Второй раздел посвящен математическому моделированию линейных непрерывных САУ при решении типовых задач ТАУ, включающих анализ и синтез линейных систем управления.
Третий раздел содержит постановку задачи и обзор методов синтеза линейных САУ, а также примеры параметрической оптимизации типовых одноконтурных и двухконтурных систем автоматического регулирования (САР).
ВВЕДЕНИЕ
Теория автоматического управления сформировалась как самостоятельная наука на основе изучения процессов управления техническими устройствами.
Науку об управлении техническими устройствами называют технической кибернетикой.
Разделами технической кибернетики являются теория информационных устройств, связанная со сбором и переработкой информации, необходимой для управления системой человеком, и теория автоматического управления, связанная с управлением системой без непосредственного участия человека.
В основу ТАУ положена теория автоматического регулирования, ставшая самостоятельной наукой к середине XX столетия. Регулирование считают простейшей разновидностью управления.
Автоматическим регулированием называют поддержание постоянной некоторой заданной величины, характеризующей процесс, или изменение ее по заданному закону, осуществляемое с помощью измерения состояния объекта или действующих на него возмущений и воздействия на регулирующий орган объекта.
Управление охватывает больший круг задач. Под автоматическим управлением понимают автоматическое осуществление совокупности воздействий, выбранных из множества возможных на основании определенной информации и направленных на поддержание или улучшение функционирования управляемого объекта в соответствии с целью управления.
Сравнение определений регулирования и управления показывает, что все задачи регулирования входят в состав задач управления как более простые варианты. Кроме того, типовыми задачами автоматического управления считают адаптацию или самонастройку системы управления в соответствии с изменением ее параметров или внешних воздействий, оптимальное управление и другие, не входящие в круг задач автоматического регулирования.
Теория автоматического регулирования (ТАР) сыграла большую роль в развитии технической кибернетики. Автоматическое регулирование представляло собою наиболее совершенный принцип автоматики в недавний период частичной автоматизации, когда технические средства автоматики осуществляли лишь простые функции управления, связанные с измерением, анализом, контролем различных величин и отработкой решений, принятых оператором в виде уставок, программ или других сигналов управления. В настоящее время комплексной автоматизации автоматизированы не только простые функции управления, связанные с отработкой сигналов управления, но и значительно более сложные, связанные с самой выработкой этих сигналов или с принятием решений, исходя из цели управления.
Сложность автоматических систем значительно возросла. Если в период частичной автоматизации они обычно состояли из отдельных (локальных) САР, взаимная координация действия которых осуществлялась оператором, то теперь возникла необходимость в автоматической координации их действий и, следовательно, в создании сложных взаимосвязанных САУ. В основе их построения лежит ступенчатый принцип. На первой ступени автоматизируются сравнительно простые локальные процессы управления, на второй – процессы управления, имеющие более общий и сложный характер и т.д.
С этой точки зрения ТАР представляет собою основы построения систем первой ступени, а ТАУ – теоретические основы построения всей иерархической лестницы процессов управления, необходимых для комплексной автоматизации сложных объектов.
Таким образом, ТАУ рассматривают как обобщение и дальнейшее развитие ТАР, требующее, в частности, широкого использования понятия информации, которое в ТАР играет сравнительно небольшую роль.
В настоящее время интенсивно развиваются теория и техника иерархических многоуровневых САУ технологическими процессами и объектами. Однако, теория и техника САР, непосредственно связанных с процессами промышленного производства и играющих в этих сложных системах роль подсистемы нижнего уровня, остается базой для их построения.
Основные понятия, принципы, задачи и методы классической ТАУ сохраняют свою актуальность и получают дальнейшее развитие в современной теории интеллектуальных систем управления. Новым в этих подходах является существенное возрастание значения понятия информации и компьютеризация процессов обработки информации, поскольку любая САУ представляет собой систему, выполняющую поставленную перед ней задачу путем сбора, передачи, обработки и использования информации на основе принципа обратной связи.
В ТАУ ключевым является понятие модели – определенной математической абстракции, описывающей процесс управления любой природы. Задачи анализа и синтеза САУ решаются методом математического моделирования. Математическое описание объекта управления, функциональных блоков САУ позволяет прогнозировать поведение объекта, возможность достижения поставленных целей управления при различных внешних условиях и т.д. Более того, поскольку самые разнообразные реальные процессы могут быть описаны в рамках одних и тех же математических структур, общая теория управления может оперировать не с конкретными техническими описаниями, а с классами математических моделей. Это обстоятельство придает ТАУ внешний облик математической дисциплины.
ОСНОВНЫЕ ПОНЯТИЯ
Понятие об автоматическом управлении
Управление каким-либо объектом, называемым объектом управления (ОУ), представляет собой процесс воздействия на него в целях обеспечения требуемого… Техническое устройство, с помощью которого осуществляют автоматическое… Совокупность ОУ и УУ образует САУ, которая в общем виде показана на рисунке 1.1.Принципы автоматического управления
Принцип управления составляет основу функционирования любой САУ. Под принципом… В технике автоматического управления нашли применение три принципа управления. Каждый из них реализуется определенным…Примеры промышленных систем управления
1.3.1 САР температуры
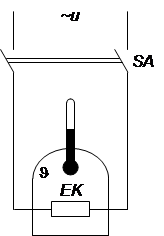
На рисунке 1.4 показана схема электрической цепи, позволяющая вручную поддерживать заданное значение температуры J (регулировать температуру) в электрической печи. Оператор в зависимости от показаний термометра включает и выключает нагреватель EK выключателем SA.
 |  | ||||
|
Рассмотренная система является разомкнутой, так как выходная величина, температура J, не оказывает никакого влияния на входное воздействие системы – напряжение нагревателя U. Другими словами, в системе ручного регулирования температуры температура внутри печи не оказывает без вмешательства оператора никакого влияния на положение выключателя SA (вкл. или откл.). Состояние на входе системы приводится в соответствие с состоянием ее на выходе действиями оператора. Таким образом, оператор замыкает систему регулирования. Следовательно, для того, чтобы полностью автоматизировать процесс регулирования, необходимо систему сделать замкнутой без оператора.
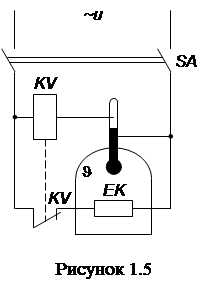
Для достижения названной цели необходимо коммутировать цепь автоматически в зависимости от температуры J. Схема простейшей цепи, удовлетворяющей названным требованиям, показана на рисунке 1.5. Объект регулирования температуры (печь) и силовая цепь, состоящая из источника питания, сетевого выключателя SA и электронагревателя EK, выполняют прежние функции. Для измерения температуры J применяется технический ртутный термометр с контактами типа ТРК. Верхним подвижным контактом устанавливают заданное значение температуры Jзад. При достижении температурой этого значения столбик ртути замыкает собой оба контакта в цепи обмотки реле KV, которое срабатывает и размыкает свой контакт KV в цепи нагревателя ЕК. Печь начинает остывать. При понижении температуры контакты термометра размыкаются и разрывают цепь обмотки реле. До этого разомкнутый контакт реле замыкается и снова подключает электронагреватель к источнику питания. Печь начинает нагреваться. Сетевой выключатель SA остается в процессе работы все время включенным. Таким образом, заданная температура в печи поддерживается автоматически, т.е. без участия оператора. Такое устройство называют системой автоматического регулирования (САР) температуры. Кроме задающего воздействия, к САР приложены возмущающие воздействия, стремящиеся нарушить требуемую функциональную связь между задающим воздействием и регулируемой величиной J. Самыми существенными из них являются колебания напряжения источника питания, изменения температуры окружающей среды, загрузка и разгрузка печи.
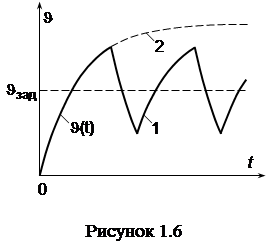 Основным достоинством рассмотренной САР считают ее простоту. К недостаткам этой системы относят непрерывные скачкообразные колебания регулируемой величины около заданного значения даже при отсутствии названных возмущающих воздействий (кривая 1 на рисунке 1.6).
Основным достоинством рассмотренной САР считают ее простоту. К недостаткам этой системы относят непрерывные скачкообразные колебания регулируемой величины около заданного значения даже при отсутствии названных возмущающих воздействий (кривая 1 на рисунке 1.6).
Для сравнения на этом рисунке пунктиром показана экспоненциальная кривая 2 изменения температуры печи J(t) при отсутствии системы регулирования температуры.
Главного недостатка простейшей САР температуры лишена САР, схема которой изображена на рисунке 1.7.
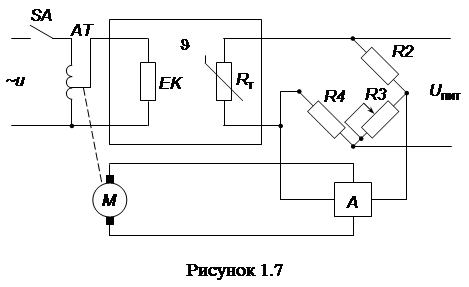 |
Как видно из сравнения схем на рисунках 1.5 и 1.7, прежний ОУ оборудован иным УУ, состоящим из измерительного моста, усилителя А, двигателя М и автотрансформатора АТ, а также источников питания печи и моста (на схеме не показаны). Ключевое место в САР занимает мост. Режим моста определяет состояние системы. Если мост уравновешен, САР находится в равновесном состоянии. В этом режиме температура печи J равна заданной Jзад, т.е. J = Jзад. УУ обеспечивает такое поступление энергии к ОУ, которое полностью компенсирует рассеивание энергии объектом. В противном случае избыток энергии приводит к росту температуры печи J, а недостаток – к уменьшению температуры. Измерение температуры и преобразование ее в электрическое сопротивление осуществляет термопреобразователь сопротивления Rт, включенный в одно из плеч моста. Противоположное ему плечо образовано резистором R3 с изменяемым сопротивлением. Этот резистор выполняет функции задатчика температуры Jзад. При температуре печи, равной заданной J = Jзад, измерительный мост уравновешен (сбалансирован). Только этот режим моста характеризуется балансом сопротивлений RтR3 = R2R4и равенством выходного напряжения моста (напряжения измерительной диагонали) Uм = 0. Следовательно, на вход усилителя А никакого сигнала не поступает, двигатель М неподвижен, движок автотрансформатора АТ находится в таком положении, которое обеспечивает напряжение U нагревателя ЕК, соответствующее равновесному режиму САР. При отклонении температуры J от заданного значения (например, в результате самопроизвольного изменения напряжения сети ~ u) изменится сопротивление Rттермопреобразователя сопротивления и равновесие моста нарушится (Uм ¹ 0). На входе усилителя появится напряжение Uм, полярность которого зависит от знака отклонения температуры от заданной. Напряжение разбаланса моста, усиленное усилителем А, прикладывается к двигателю, который начинает вращаться и перемещать движок автотрансформатора АТ в нужном направлении. По достижении заданной температуры мост уравновесится и двигатель остановится. В установившемся режиме и при отсутствии новых возмущений к нагревателю поступает столько электрической энергии, сколько ее необходимо для поддержания заданной температуры. Изменение задающего воздействия подобно возмущению вызывает в САР динамический (переходный) режим, заключающийся в изменении температуры от начального J0до заданного (конечного) значения Jзад(рисунок 1.8).
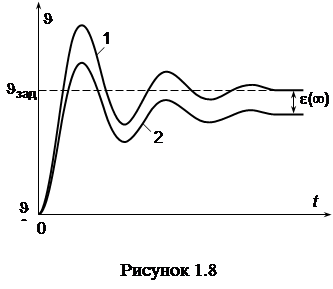 Никогда переходный процесс не совершается мгновенно. В силу тепловой инерции печи ее температура изменяется медленно. Процесс установления нового заданного значения может сопровождаться колебаниями температуры около этого значения Jзад. В отличие от простейшей САР названные колебания температуры с течением времени затухают, т.е. их амплитуда уменьшается. По точности достижения заданного значения различают астатические и статические САР. Кривые 1 и 2 на рисунке 1.8 изображают переходные процессы, вызванные управляющим воздействием, в астатической и статической САР соответственно. Установившийся режим астатической системы характеризуется отсутствием ошибки регулирования
Никогда переходный процесс не совершается мгновенно. В силу тепловой инерции печи ее температура изменяется медленно. Процесс установления нового заданного значения может сопровождаться колебаниями температуры около этого значения Jзад. В отличие от простейшей САР названные колебания температуры с течением времени затухают, т.е. их амплитуда уменьшается. По точности достижения заданного значения различают астатические и статические САР. Кривые 1 и 2 на рисунке 1.8 изображают переходные процессы, вызванные управляющим воздействием, в астатической и статической САР соответственно. Установившийся режим астатической системы характеризуется отсутствием ошибки регулирования  , см. формулу (1.1), где g(t) = Jзади y(t) = Jзад. Напротив, статическая САР не может обеспечить такой точности и характеризуется некоторой ошибкой регулирования
, см. формулу (1.1), где g(t) = Jзади y(t) = Jзад. Напротив, статическая САР не может обеспечить такой точности и характеризуется некоторой ошибкой регулирования  . Эту величину иногда называют статизмом САР.
. Эту величину иногда называют статизмом САР.
1.3.2 САР угловой скорости ДПТ
Система состоит из двигателя постоянного тока (ДПТ) с независимым возбуждением М, вращающего шпиндель Ш металлорежущего станка, например (рисунок 1.9). ДПТ и шпиндель образуют ОР. Регулируемой величиной является угловая скорость якоря ДПТ w. Вал ДПТ механически связан со шпинделем и тахогенератором GS, который служит преобразователем угловой скорости якоря w в электрическое напряжение uтг. Обмотка якоря ДПТ подключена к усилителю А. Ко входу усилителя приложено напряжение ue = ug – uтг, где ug– задающее напряжение, uтг– напряжение тахогенератора. Задающее напряжение ugснимается с потенциометра R, т.е. потенциометр является задатчиком угловой скорости якоря ДПТ w. Напряжение uтгснимается с тахогенератора – датчика регулируемой величины w. Знак этого напряжения зависит от направления вращения якоря ДПТ, а величина uтгпропорциональна угловой скорости w. Тахогенератор осуществляет ОС в системе.
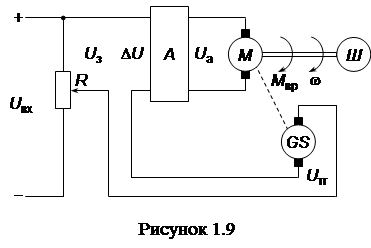 |
Знак и величина задающего напряжения ugопределяют направление вращения якоря и значение его угловой скорости w. Стабилизация (регулирование) w осуществляется следующим образом. Если в какой-то момент времени увеличился момент сопротивления вращению якоря Мс(например, при резании металла), то угловая скорость w уменьшится. Вследствие этого уменьшится напряжение тахогенератора uтги увеличится напряжение ue– возникает сигнал рассогласования DU. Возрастет напряжение на выходе усилителя, приложенное к обмотке якоря ДПТ. В результате увеличится ток якоря iaи вращающий момент двигателя Ма, что восстановит угловую скорость w.
Аналогичные процессы регулирования (стабилизации) происходят в САР при уменьшении момента сопротивления Мс, а также при изменении задающего воздействия (положения движка реостата R). В последнем случае угловая скорость w устанавливается на новом уровне, соответствующем заданию.
Функциональная схема типовой одноконтурной САУ
Взаимодействие элементов в САУ представляют наглядно функциональными структурными схемами (блок-схемами).
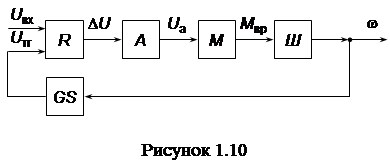
Замкнутую САУ угловой скорости шпинделя (рисунок 1.9) можно представить следующей функциональной схемой (рисунок 1.10).
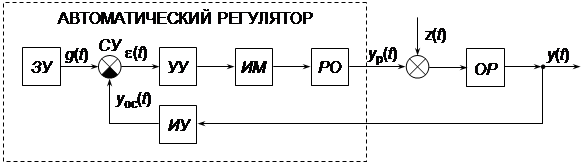
 Функциональные схемы, подобные рассмотренной схеме, имеют САУ уровнем, температурой, давлением и т.п. Элементы этих систем связаны между собой функционально совершенно одинаково, т.е. названные САУ характеризуются одной функциональной схемой. Ее называют типовой (рисунок 1.11).
Функциональные схемы, подобные рассмотренной схеме, имеют САУ уровнем, температурой, давлением и т.п. Элементы этих систем связаны между собой функционально совершенно одинаково, т.е. названные САУ характеризуются одной функциональной схемой. Ее называют типовой (рисунок 1.11).
Таким образом, САУ в общем случае состоит из следующих основных элементов или устройств:
– задающего устройства (ЗУ);
– суммирующего устройства (СУ);
– усилительного устройства (УУ);
– исполнительного механизма (ИМ) или сервопривода;
– регулирующего органа (РО);
– измерительного устройства (ИУ);
– объекта регулирования (ОР).
 | |||
|
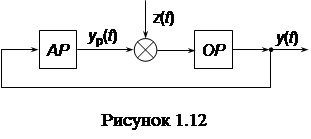
Комплекс устройств, присоединяемых к ОР и обеспечивающих автоматическое поддержание заданного значения регулируемой величины, называют автоматическим регулятором (АР). АР и ОР в совокупности образуют САР (рисунок 1.12).
 |
Классификация САУ
САУ (САР) различают по следующим признакам:
– по принципу управления (см. п. 1.2);
– по цели управления (системы стабилизации или САР, системы программного управления и следящие системы);
– по структуре ( замкнутые и разомкнутые);
– по количеству управляемых величин (одномерные и многомерные);
– по характеру величин или сигналов (непрерывные и дискретные);
– по характеру изменения параметров (стационарные и нестационарные);
– по характеру математического описания (линейные и нелинейные);
– по способности приспосабливаться к изменениям внешних условий (адаптивные и неадаптивные);
– по виду функциональной схемы или топологии (одноконтурные и многоконтурные);
– по воздействию ИМ на РО (прямого и непрямого действия);
– по наличию статической ошибки e (статические и астатические).
Задачи теории автоматического управления
Все многообразие задач ТАУ принято делить на три основные группы: 1) задачи анализа САУ; 2) задачи синтеза САУ;Контрольные вопросы
1 Что понимают под автоматическим управлением?
2 Что понимают под математической моделью элемента и САУ?
3 Какие задачи решают методом математического моделирования?
4 Совокупность каких технических устройств образует любую САУ?
5 Что понимают под алгоритмом (законом) управления?
6 Что понимают под принципом автоматического управления?
7 Какова сущность управления по отклонению (по ошибке)?
8 Какое свойство САУ обеспечивает отрицательная обратная связь?
9 Какова сущность управления по возмущению?
10 Какова сущность комбинированного управления?
11 Каковы достоинства и недостатки основных принципов управления?
12 Что понимают под функциональной схемой САУ?
13 Какова функциональная схема одноконтурной САУ?
14 Что понимают под автоматическим регулятором?
15 Какие признаки положены в основу классификации САУ?
16 Какие задачи считают типовыми задачами ТАУ?
– Конец работы –
Используемые теги: Теория, автоматического, управления0.069
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Что будем делать с полученным материалом:
Если этот материал оказался полезным для Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.143 сек.
Новости и инфо для студентов