рефераты конспекты курсовые дипломные лекции шпоры

- Раздел Менеджмент
- /
- ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Реферат Курсовая Конспект
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ - раздел Менеджмент, Министерство Образования И Науки Рф ...
Министерство образования и науки РФ
Пермский государственный технический университет
Андриевская Н. В.
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Конспект лекций
Часть 1
Пермь 2006
УДК 62-5
Рекомендовано к изданию редакционно-издательским советом
Пермского государственного технического университета
Рецензент
доц. каф. «Автоматика и управление», кандидат технических наук
Хижняков Ю. Н.
Андриевская Н. В.
Содержит основные понятия и положения классической теории автоматического управления. Рассмотрены все основные вопросы, связанные с математическим… Рекомендовано для студентов специальностей 210200 «Автоматизация…СОДЕРЖАНИЕ
1. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ ТЕОРИИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ. 6
1.1. Историческая справка. 6
1.2. Взаимосвязь ТАУ с другими техническими науками. 6
1.3. Основные понятия и определения ТАУ.. 7
2. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ. 8
2.1. Основные характеристики объекта управления. 8
Примеры объектов управления. 8
2.2. Типовая функциональная схема системы автоматического управления. 10
2.3. Классификация систем автоматического управления. 11
2.3.1. Классификация по характеру динамических процессов в системе. 11
2.3.2. Классификация по характеристикам управления. 13
2.3.3. Классификация САУ по другим признакам.. 16
2.4. Основные (типовые) управляющие воздействия САУ.. 17
2.5. Временные характеристики САУ.. 19
2.6. Частотные динамические характеристики. 19
2.7. Типовые динамические звенья. 22
2.7.1. Безынерционное звено. 22
2.7.2 Апериодическое звено. 24
2.7.3. Колебательное звено. 27
2.7.4. Идеальное интегрирующее звено. 31
2.7.5. Реальное интегрирующее звено. 33
2.7.5. Изодромное интегрирующее звено. 34
2.7.6. Идеальное дифференцирующее звено. 35
2.7.7. Реальное дифференцирующее звено. 36
2.7.8. Звено чистого запаздывания. 37
2.8. Структурные схемы САУ.. 38
2.8.1. Многоконтурные структурные схемы.. 41
2.8.2. Правила структурных преобразований. 41
2.8.3. Изображение структурных схем в виде графов. 42
3. УСТОЙЧИВОСТЬ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ, 44
3.1. Понятие устойчивости по Ляпунову. 44
3.2. Алгебраические критерии устойчивости. 47
3.2.1. Критерий Гурвица. 47
3.2.2. Критерий Рауса. 48
3.3. Частотные критерии устойчивости. 49
3.3.1. Принцип аргумента. 49
3.3.2. Критерий Михайлова. 50
3.3.3 Критерий Найквиста. 52
3.3.4. Логарифмический критерий устойчивости. 55
3.4. Сравнительный анализ критериев устойчивости. 56
3.5. Запас устойчивости. 57
3.5.1. Устойчивость систем со звеном чистого запаздывания. 58
3.6. Структурно устойчивые и структурно неустойчивые системы.. 59
3.7. Влияние параметров на устойчивость системы. D-разбиение по одному. 59
параметру. 59
4. АНАЛИЗ КАЧЕСТВА САУ. 61
4.1. Основные показатели качества САУ.. 61
4.2. Прямые методы оценки качества. 62
4.2.1. Классический метод определения показателей качества. 62
4.2.2. Операторный метод. 62
4.2.3. Частотный метод. 63
4.2.3.1. Понятие обобщенной частотной передаточной функции. 63
4.2.3.2. Определение показателей качества по типовым характеристикам.. 64
4.2.4. Моделирование с использованием вычислительных средств. 66
4.3. Косвенные методы оценки качества САУ. 66
4.3.1. Частотный косвенный метод оценки качества. 66
4.3.1.1. Построение вещественной частотной характеристики с использованием ЛАЧХ разомкнутой системы и номограммы. 69
4.3.2. Корневые методы оценки показателей качества. 71
4.3.2.1. Влияние полюсов передаточной функции на качество переходных процессов 71
4.3.2.2. Связь степени устойчивости с быстродействием системы.. 72
4.3.3.3 Связь колебательности с перерегулированием.. 73
4.3.4. Влияние нулей передаточной функции на качество переходного процесса. 74
4.3.5. Диаграмма Вышнеградского. 75
4.4. Интегральный метод оценки показателей качества. 76
4.4.1. Линейная интегральная оценка. 76
4.4.1.1. Метод Кулебакина. 77
4.4.2. Апериодическая интегральная оценка. 77
5. СИНТЕЗ ЛИНЕЙНЫХ САУ. 79
5.1. Особенности синтеза. 79
5.2. Этапы синтеза САУ.. 79
5.2.1. Желаемая ЛАЧХ.. 80
5.2.1.1. Построение желаемой ЛАЧХ.. 80
5.3. Синтез последовательных корректирующих устройств. 82
5.3.1. Алгоритм построения САУ с последовательными. 83
корректирующими звеньями. 83
5.3.2. Синтез САУ с параллельными корректирующими устройствами. 83
5.3.2.1. Алгоритм построения САУ с параллельными. 84
корректирующими звеньями. 84
5.4. Влияние обратных связей на динамические свойства объекта. 84
5.4.1. Охват апериодического звена жесткой отрицательной. 85
обратной связью (ЖООС). 85
5.4.2. Охват апериодического звена жесткой положительной. 85
обратной связью (ЖПОС). 85
5.4.3. Охват апериодического звена гибкой отрицательной. 85
обратной связью (ГООС). 85
5.4.4. Охват апериодического звена гибкой положительной. 86
обратной связью (ГЖОС). 86
5.5. Статические и астатические системы автоматического управления. 86
5.5.1. Передаточная функция типовой одноконтурной системы.. 86
5.5.2. Ошибки статических и астатических систем при типовых. 88
задающих воздействиях. 88
5.5.3. Ошибка при возмущающем воздействии, не равном нулю.. 89
5.6. Чувствительность параметров. 90
5.7. Типовые законы регулирования линейных систем.. 91
ЛИТЕРАТУРА.. 92
ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ ТЕОРИИ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ.
Историческая справка
Основоположником предмета теории автоматического управления является русский ученый и инженер И.А. Вышнеградский, который в 1867 г. опубликовал… где Р - регулятор или автоматически управляющее устройство – устройство, осуществляющее в соответствии с алгоритмом…Взаимосвязь ТАУ с другими техническими науками
Кибернетика- наука об оптимальном управлении сложными системами (технические объекты, технологические процессы, живые организмы, коллективы,… Системой автоматического управления - называют совокупность управляемого объекта и автоматического управляющего…Основные понятия и определения ТАУ
Автоматическое регулирование - это поддержание постоянной заданной величины, характеризующей состояние объекта управления или изменение этой величины по определенному заданному закону регулирования. При этом это поддержание осуществляется путем измерения управляемых величин объекта управления и выработкой управляющего воздействия на данный объект.
Автоматическое управление - это автоматическое выполнение ряда функций, обеспечивающих оптимальное функционирование системы с возможностью выбора из различных вариантов функционирования. При этом данные функции выполняются по алгоритмам, достигающим цель управления.
САР – система автоматического регулирования;
ТАР – теория автоматического регулирования;
САУ – система автоматического управления;
ТАУ – теория автоматического управления.
МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ.
Основные характеристики объекта управления.
Объектом управления в ТАУ могут быть любые технические объекты, технологические процессы, а также более простые САУ. Любой объект характеризуется… Внешними воздействиями называют величины, влияющие на объект извне. Внешние… 1. Управляющее воздействие (управляющий сигнал, управляющая входная величина) – это величина, характеризующая влияние…Примеры объектов управления
1.
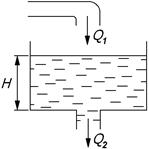
у = Н - управляемая величина (уровень жидкости);
х = Q1 - управляющее воздействие (приток жидкости);
z = Q2 – нагрузка (расход жидкости).
Динамическая характеристика:
где S – площадь поперечного сечения резервуара.
Y = f(X, Z, t) – взаимосвязь всех координат.

Каждый объект характеризуется двумя характеристиками (режимами): статической и динамической.
Статическая характеристика (установившийся режим) – это характеристика, в которой постоянное входное воздействие Х и возмущение Z постоянны во времени, тогда управляемая величина Y = f(X,Z).
Статические характеристики бывают монотонные и экстремальные.

Частным случаем статической характеристики является квазистатическая характеристика, когда на вход подается гармоническое воздействие (sin), тогда в установившемся режиме тоже будет гармоническая величина.
Динамическая характеристика, когда управляемая величина Y не является постоянной во времени и описывается следующим уравнением: Y(t) = f(X(t), Z(t), t). Все переменные описываются системой обыкновенных дифференциальных уравнений (ОДУ), либо системой нелинейных дифференциальных уравнений (НДУ).


2. Электродвигатель постоянного тока.
Фд - магнитный поток двигателя;
iя - ток якоря двигателя;
Uя - напряжение якоря двигателя;
Rя - сопротивление якоря двигателя;
iв - ток обмотки возбуждения;
Uв - напряжение обмотки возбуждения;
Мтр - момент трения, возникающий на валу двигателя;
w - частота вращения вала двигателя;
J - момент инерции механизма, приведенного к валу двигателя;
Мнагр - момент нагрузки на валу двигателя.
Запишем уравнения:
 - динамические характеристики.
- динамические характеристики.
При статической характеристике все производные зануляются.
a1 и c1 -конструктивные параметры двигателя;
Фд - является нелинейной функцией от тока возбуждения;
Мтр - является нелинейной функцией от частоты вращения вала двигателя;
Управляющим воздействием является Х = Uя(Uв), управляемой величиной – У = w, нагрузка (внешнее воздействие) – Z = Uв(Uя), Мнагр, Мтр – помеха.
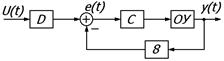
Типовая функциональная схема системы автоматического управления.
U(t) – задающее воздействие (общий сигнал в систему),
x(t) – управляющее воздействие (то, что вырабатывает регулятор),
y(t) – управляемая величина,
e(t) – отклонение (ошибка) управляемой величины от задающего воздействия.
Структура САУ:
1 - Задающее устройство, которое преобразует входной сигнал U(t) в сигнал, удобный для дальнейшего использования;
Å 2 - сравнивающее устройство, вырабатывает сигнал ошибки (отклонения) как разность задающего сигнала и управляемой величины;
3 - преобразующее устройство, преобразует сигнал ошибки в другую форму, удобную для дальнейшего использования, при этом не выполняются функции усиления и коррекции (пример: электрическая®механическая);
4 и 8 - корректирующие устройства, улучшают динамические свойства регулирования и повышают устойчивость. В зависимости от включения бывают параллельными или последовательными. 4 - последовательная коррекция, 8 - параллельная коррекция.

Å 5 - сравнивающее устройство местной обратной связи;
6 -усилительное устройство, усиливает мощность сигнала;
7 - исполнительное устройство, вырабатывает управляющее воздействие x(t) непосредственно на объект управления;
9 - чувствительный элемент, фиксирует (измеряет) управляемую величину y(t);
10 - элемент главной обратной связи, преобразует управляемую величину y(t) в вид, удобный для сравнения с задающим сигналом;
ОУ - объект управления.
Блоки 1, 10, 9 образуют датчик, а блоки 3, 4, 5, 6, 7, 8 – сервомеханизм.
Тогда, с учетом укрупнений, получим:
Датчик измеряет управляемую величину и задающую. Сервомеханизм вырабатывает и реализует управляющее воздействие.
Реальная САУ может не содержать некоторые из рассматриваемых пронумерованных блоков. Некоторые блоки могут объединяться. То, что называли блоками, носит название звеньев. И регулятор, и ОУ могут состоять из нескольких звеньев.
 Два сигнала – входной и выходной.
Два сигнала – входной и выходной.
Классификация систем автоматического управления.
Классификационные признаки САУ выделяют три крупные группы:
1. Классификация по характеру динамических процессов в системе.
2. Классификация по характеристикам управления.
3. Классификация по другим признакам.
4.
2.3.1. Классификация по характеру динамических процессов в системе
Непрерывность.
Для того чтобы система была непрерывная, необходимо наличие непрерывных статических характеристик системы.По принципу управления.
а) В автоматической системе управления с разомкнутой цепью воздействий (кратко – разомкнутая система) входными воздействиями управляющего устройства… Разомкнутые системы можно разделить в свою очередь на два класса: системы,… Алгоритм управления разомкнутой системы первого типа имеет вид:По управляющему воздействию (задающее воздействие).
а) Стабилизирующая автоматическая система управления (система стабилизации) – это система, алгоритм функционирования которой содержит предписание… Стабилизирующие системы самые распространенные в промышленной автоматике. Их применяют для стабилизации различных…Основные (типовые) управляющие воздействия САУ
Наибольшее применение в теории и практике автоматического управления находят следующие четыре типовых воздействия: ступенчатое, импульсное,… Ступенчатое воздействие – это воздействие, которое мгновенно возрастает от…Ступенчатому воздействию соответствует функция
При анализе и расчете систем удобно использовать ступенчатое воздействие, у которого величина а0 = 1. Его называют единичным ступенчатым… Ступенчатое воздействие чаще всего используют при испытаниях и расчетах систем стабилизации, так как эти воздействия…Временные характеристики САУ
Наиболее наглядное представление о динамических свойствах элемента дает его переходная функция (характеристика). Переходной функцией h(t) называют…Частотные динамические характеристики
1. Передаточная функция звена (W(p)). 2. Амплитудная частотная характеристика (АЧХ). 3. Фазовая частотная характеристика (ФЧХ).Типовые динамические звенья
Алгоритмические звенья, которые описываются обыкновенными дифференциальными уравнениями первого и второго порядка, получили название типовых… Типовые динамические звенья подразделяются на: 1. безынерционное звено (усилительное);Шаблон поправки
 Для построения ЛАЧХ апериодических звеньев в литературе приводится шаблон поправки.
Для построения ЛАЧХ апериодических звеньев в литературе приводится шаблон поправки.
В пределах одной декады ЛАЧХ вокруг частоты wс претерпевает наибольшие изменения. Шаблон таких изменений уже вычислен и приведен в литературе.
Порядок построения ЛАЧХ апериодического звена
1. Строим асимптотический ЛАЧХ.
2. Выбирается шаблон поправки, ось ординат которого совмещается с частотой среза асимптотической ЛАЧХ.
3. По данному шаблону вносятся изменения в асимптотическую ЛАЧХ.
Примеры апериодических звеньев
 |
2.7.3. Колебательное звено
Динамика процессов в колебательном звене описывается уравнением:
 ,
,
где k- коэффициент усиления звена; Т- постоянная времени колебательного звена;  - коэффициент демпфирования звена (или коэффициент затухания).
- коэффициент демпфирования звена (или коэффициент затухания).
В зависимости от величины коэффициента демпфирования различают четыре типа звеньев:
а) колебательное 0<<1;
б) апериодическое звено II порядка>1;
в) консервативное звено =0;
г) неустойчивое колебательное звено <0.
1. Переходная характеристика колебательного звена:


Амплитуды первых двух колебаний определяют величину - .
.
Чем ближе коэффициент затухания к единице, тем меньше амплитуда колебаний, чем меньше Т, тем быстрее устанавливаются переходные процессы.
При x >1 колебательное звено называется апериодическим звеном второго порядка (последовательное соединение двух апериодических звеньев с постоянными времени Т1 и Т2).
|
 , или можно записать так
, или можно записать так  .
.
Здесь w0 – величина, обратная постоянной времени ( );
);  .
.
Такое звено в литературе называют консервативным звеном.

Все переходные характеристики будут колебаться вдоль величины k.
2. Импульсная переходная характеристика:



 3.Передаточная функция:
3.Передаточная функция:
4.АФХ:

График АФХ будет выглядеть следующим образом:
Это характеристика для колебательного звена и для апериодического звена второго порядка.
Для апериодического звена -  .
.
А в случае б) формула АФХ совпадает со случаем а).
 -
-
- АФХ для консервативного звена.
 5.АЧХ:
5.АЧХ:
 .
.
АЧХ при частоте  имеет максимум (резонансный пик), равный
имеет максимум (резонансный пик), равный
 .
.
Отсюда видно, что, чем меньше коэффициент x, тем больше резонансный пик.

 Т.о., по графику АЧХ видно, что колебательное звено, как и все инерционные звенья, хорошо пропускает сигналы низкой частоты и плохо – сигналы высокой частоты; если частота гармонического входного сигнала близка к частоте собственных колебаний звена, то отношение амплитуды выходного сигнала к амплитуде входного больше передаточного коэффициента k.
Т.о., по графику АЧХ видно, что колебательное звено, как и все инерционные звенья, хорошо пропускает сигналы низкой частоты и плохо – сигналы высокой частоты; если частота гармонического входного сигнала близка к частоте собственных колебаний звена, то отношение амплитуды выходного сигнала к амплитуде входного больше передаточного коэффициента k.
6.ФЧХ:

Для случая б) график будет аналогичным, только перегиб будет чуть меньше (штриховая линия на графике).


7.ЛАЧХ:
 , где
, где 
Асимптотическая ЛАЧХ колебательного звена:
Определяем наклон на втором участке:

Шаблон к графику а) дается от 0 до 1 шагом в 0,1.

Консервативное звено:
Структурная схема колебательного звена будет выглядеть следующим образом:


Примером колебательного звена является любая RLC- цепь.
2.7.4. Идеальное интегрирующее звено
Динамика интегрирующего звена описывается дифференциальным уравнением
 .
.
1. Переходная характеристика:

2. Импульсная переходная характеристика (или функция веса) имеет вид:
3. Передаточная функция идеального интегрирующего звена:

4. АФХ звена:

на комплексной плоскости изображается в виде прямой, совпадающей с мнимой осью.
5. АЧХ:

представляет собой гиперболу, которая при  стремится к бесконечности. При увеличении частоты значения А(w) стремятся к нулю. Это свойство сближает интегрирующие звенья с инерционными.
стремится к бесконечности. При увеличении частоты значения А(w) стремятся к нулю. Это свойство сближает интегрирующие звенья с инерционными.
6. ФЧХ идеального интегрирующего звена:
показывает, что сдвиг фаз, создаваемый звеном, на всех частотах одинаков и равен
-900.
7. ЛАЧХ:

представляет собой прямую с наклоном –20дБ/декаду, проходящую через точку с координатами w=1, L(w)=20lgk.
 |
Пример:
 Идеальным интегрирующим звеном можно считать (с некоторыми допущениями) гидравлический исполнительный механизм, для которого входной и выходной величиной является количество жидкости Q (м3/с), поступающей в единицу времени в полость цилиндра, а выходной величиной – перемещение l (м) поршня со штоком. Действительно, если масса перемещающихся частей пренебрежимо мала и усилие, создаваемое давлением гидронасоса, существенно больше сил сопротивления, то перемещение поршня определяется уравнением баланса жидкости вида
Идеальным интегрирующим звеном можно считать (с некоторыми допущениями) гидравлический исполнительный механизм, для которого входной и выходной величиной является количество жидкости Q (м3/с), поступающей в единицу времени в полость цилиндра, а выходной величиной – перемещение l (м) поршня со штоком. Действительно, если масса перемещающихся частей пренебрежимо мала и усилие, создаваемое давлением гидронасоса, существенно больше сил сопротивления, то перемещение поршня определяется уравнением баланса жидкости вида
 ,
,
где S – площадь поверхности жидкости (м2), а коэффициент k – выражением
 .
.
Идеальных интегрирующих звеньев в реальных объектах практически не существует.
2.7.5. Реальное интегрирующее звено
Динамика процесса в таком звене описывается следующим уравнением:
 ,
,
где k – коэффициент усиления.
1. Переходная характеристика:
2. Импульсная переходная характеристика:
3. Передаточная функция реального интегрирующего звена:
Реальное интегрирующее звено представляет собой последовательное соединение идеального интегрирующего звена и апериодического.
4. АФХ:

5. АЧХ:
6. ФЧХ:
7. ЛАЧХ:

Структурная схема:
Примером может служить электродвигатель постоянного тока, в котором управляемая величина – поворот вала двигателя.
2.7.5. Изодромное интегрирующее звено
Динамика процесса описывается следующим уравнением:
 ,
,
здесь k и k1 – коэффициенты усиления.
1. Переходная характеристика:

2. Импульсная переходная характеристика:
3. Передаточная функция:
4. АФХ:

5. АЧХ:
6. ФЧХ:
7. ЛАЧХ:


 |
Структурная схема:
Примером изодромного интегрирующего звена может служить гидравлический демпфер, к поршню которого присоединена пружина.
2.7.6. Идеальное дифференцирующее звено
Динамика процесса в таком звене описывается уравнением:

1. Переходная характеристика:

2. Импульсная переходная характеристика:

3. Передаточная функция:
4. АФХ:

совпадает с положительной частью мнимой оси.
5. АЧХ:

показывает: чем больше частота входного сигнала, тем больше амплитуда выходного сигнала. Эта особенность дифференцирующих звеньев вытекает непосредственно из основного уравнения: чем быстрее изменяется во времени сигнал x(t), тем больше его производная в правой части и выходной сигнал y(t).
6. ФЧХ:
Сдвиг фаз, создаваемый идеальным дифференцирующим звеном, на всех частотах одинаков и равен

7. ЛАЧХ звена:

 |
- прямая линия с наклоном +20 дБ/декаду, проходящая через точку с координатами
 .
.
 Структурная схема:
Структурная схема:
Примером дифференциального звена можно назвать тахогенератор постоянного тока.
2.7.7. Реальное дифференцирующее звено
Динамика дифференцирующего звена представлена уравнением

1. Переходная характеристика:
График меняется скачком.
2. Импульсная переходная характеристика:
3. Передаточная функция:
4. АФХ:

5. АЧХ:

6. ФЧХ:

7. ЛАЧХ:


 |
Структурная схема:
Примером реального дифференцирующего звена является Rc – цепь.
 Здесь x=U1 – входная величина; y=U2=UR – выходная величина.
Здесь x=U1 – входная величина; y=U2=UR – выходная величина.
2.7.8. Звено чистого запаздывания
Звеном чистого запаздывания называется такое звено, выходная величина которого полностью повторяет входную величину, но со сдвигом во времени на величину t (время запаздывания).
 Динамика процесса описывается уравнением:
Динамика процесса описывается уравнением:
 ,
,
где t - длительность запаздывания.
1. Переходная характеристика:

2. Импульсная переходная характеристика:

3. Передаточная функция звена:

4. АФХ:

представляет собой окружность с центром в начале координат и радиусом, равным единице.
5. АЧХ:

6. ФЧХ:

 |
7. ЛАЧХ:

 Структурная схема:
Структурная схема:
Структурные схемы САУ
Для оценки точности, устойчивости и качества управления замкнутых систем необходимо знать их уравнения статики и динамики. Уравнение динамики… Структурные схемы САУ - это графическое изображение САУ, где динамика…Типовые элементы структурных схем САУ
Для упрощения (свертывания) сложных алгоритмических схем применяют три главных правила преобразования, с помощью которых определяют эквивалентные… v Передаточная функция последовательно соединенных звеньев равна произведению…УСТОЙЧИВОСТЬ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ,
Здесь, в рисунке а), А0 – невозмущенное состояние, А2 – возмущенное состояние;… Пусть дана САУ, которая характеризуется переменными . Движение системы при заданном режиме определяется xi(t).Это…Понятие устойчивости по Ляпунову.
Решением данного уравнения является как функция начальных значений (уравнение… К системе приложено внешнее воздействие, которое привело к отклонению движения от установившегосяАлгебраические критерии устойчивости.
3.2.1. Критерий Гурвица
Автоматическая система, описываемая характеристическим уравнением
устойчива, если при a0>0 положительны все определители ∆1, ∆2, . . .∆п вида Если хотя бы один из определителей, называемых определителями Гурвица, отрицателен, то система неустойчива. Если…Частотные критерии устойчивости
3.3.1. Принцип аргумента Рассмотрим уравнение: ,Рассмотрим характеристическое уравнение системы

p=jw - придаем чисто мнимое значение.
Для того чтобы система была устойчивой, необходимо, чтобы суммарный угол поворота векторов р-рi составлял угол pп.
Алгоритм применения критерия Михайлова.
1. Получаем передаточную функцию системы. 2. Составляем характеристическое уравнение системы (это знаменатель…Формулировка критерия Михайлова.
Это означает, что характеристическая кривая устойчивой системы должна при изменении w от 0 до ¥ пройти… На рисунке а) изображен вектор D(jw), называемый характеристической кривой или… В практических расчетах удобно применять следствие из критерия Михайлова:Критерий Найквиста
В отличие от критериев Гурвица, Рауса и Михайлова, которые основаны на анализе характеристического уравнения системы, критерий Найквиста позволяет… Имеется САУ:Алгоритм использования критерия Найквиста
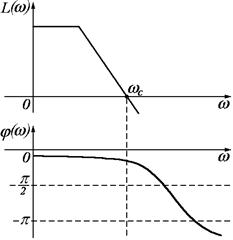
1. Приводим систему к виду 2. Получаем передаточную функцию разомкнутой системы.Логарифмический критерий устойчивости применяется при исследовании сложных многоконтурных систем, при построении ЛАЧХ корректирующих звеньев, выводящих исходную систему из неустойчивого состояния. Базовым для логарифмического критерия устойчивости является критерий Найквиста.
По критерию Найквиста, базовая точка (-1;0) в комплексной плоскости.

Рассмотрим АФХ разомкнутой системы в двух случаях:
1. АФХ первого рода, когда система в разомкнутом состоянии устойчива.
Это означает, что годограф такой системы не пересекает отрезок  .
.
 САУ в разомкнутом состоянии будет устойчива, если частота среза логарифмической амплитудно-частотной характеристики (ЛАЧХ) меньше частоты, при которой ФЧХ достигает значения -p, т.е. при положительных значениях ЛАЧХ до частоты среза ФЧХ не должна достигать угла -p.
САУ в разомкнутом состоянии будет устойчива, если частота среза логарифмической амплитудно-частотной характеристики (ЛАЧХ) меньше частоты, при которой ФЧХ достигает значения -p, т.е. при положительных значениях ЛАЧХ до частоты среза ФЧХ не должна достигать угла -p.
 |
 2. АФХ второго рода, когда разомкнутая система неустойчивая, а замкнутая система устойчива.
2. АФХ второго рода, когда разомкнутая система неустойчивая, а замкнутая система устойчива.
Для АФХ второго рода логарифмический критерий устойчивости заключается в следующем: при положительных значениях ЛАЧХ до частоты среза, количество переходов прямой -p ФЧХ должно быть равно нулю (т.е. количество положительных переходов равно количеству отрицательных переходов).
3.4. Сравнительный анализ критериев устойчивости
1. Алгебраический критерий Гурвица целесообразно применять при порядке системы  .
.
2. Алгебраический критерий Рауса применяется при порядке системы от 4 до 6.
3. Критерий устойчивости Михайлова применяется при исследовании сложных многоконтурных систем, когда необходимо выяснить влияние измерения структуры системы и средств ее стабилизации на устойчивость.
4. Критерий устойчивости Найквиста целесообразно применять тогда, когда система имеет одноконтурный вид, и если отдельные элементы системы заданы экспериментально.
5. Логарифмический критерий устойчивости применяется тогда же, когда и критерий Найквиста, особенно при исследовании системы на большом интервале частот.
Запас устойчивости
Запас устойчивости по алгебраическому критерию Гурвица
, , где - запас устойчивости. Запасом устойчивости считается некоторая величина , при которой самый min…Запас устойчивости при частотных критериях устойчивости
При частотных критериях устойчивости различают два критерия: по амплитуде и по фазе. Запас устойчивости по амплитуде определяется наиближайшей… Нормированная величина запаса устойчивости: - запас устойчивости по модулю.Структурно устойчивые и структурно неустойчивые системы
Здесь КОС – коэффициент обратной связи. Устойчивость такой системы достигается путем изменения коэффициентов усиления.Влияние параметров на устойчивость системы. D-разбиение по одному
Параметру
Теория устойчивости позволяет не только определить устойчивость данной системы, но и влияние некоторых параметров системы на ее устойчивость. Данное… Предположим, что известно характеристическое уравнение системы:АНАЛИЗ КАЧЕСТВА САУ.
Основные показатели качества САУ
1. Время достижения установившегося режима – такое время, по истечение которого для управляемой величины выполняется условие: , где у – управляемая величина; dр – некоторая величина (для САУ 5% от установившегося режима).Прямые методы оценки качества
v Классический метод; v операторный метод; v частотный метод;Косвенные методы оценки качества САУ.
4.3.1. Частотный косвенный метод оценки качества. 1. Близким по виду вещественным характеристикам Р(w) соответствуют близкие по виду переходные характеристики h(t).Смещенные уравнения
. Сместим мнимую ось влево на величину h, что математически означает введение…Интегральный метод оценки показателей качества
Рассмотрим кривую переходного процесса 1 и установившееся значение 2. Будем считать, что 1 – переходный процесс реальной системы; 2 – переходный… Тогда отличие реальной системы от идеальной определяется площадью S, и если взять критерий – является функциейСИНТЕЗ ЛИНЕЙНЫХ САУ.
Под синтезом линейных САУ понимается выбор такой структурной схемы, ее параметров, характеристик, которые отвечают с одной стороны заданным показателям качества и простоты технической реализации и надежности с другой стороны.
Особенности синтеза
1. САУ включает в себя объект управления и корректирующие устройства (это такие устройства, структура и параметры которых изменяются в соответствие… 2. Задание показателей качества определяется как верхняя граница допустимых… 3. Для современных САУ процедура синтеза определяет ориентировочную характеристику САУ, поэтому окончательный…Этапы синтеза САУ
2. Определяется критерий оптимизации, основанный на заданных показателях качества САУ. 3. Строится структурная схема САУ, выбираются технические средства ее… 4. Синтез оптимальной динамической характеристики.Синтез последовательных корректирующих устройств
2) Если при задаче синтеза ставится задача скомпенсировать некоторую постоянную, то в качестве корректирующего звена ставят форсирующее звено Построим передаточную функцию разомкнутой системы:Влияние обратных связей на динамические свойства объекта
Существуют так называемые обратные связи (ОС) и соответствующие им передаточные функции (WOC).В зависимости от того, чему равна передаточная функция…Рассмотрим случай, когда в качестве объекта берем апериодическое звено
5.4.1. Охват апериодического звена жесткой отрицательной обратной связью (ЖООС)Статические и астатические системы автоматического управления.
Статическими называются такие САУ, у которых при постоянном задающем…Таблица
| Составляющие сигналов ошибки | Порядок астатизма | Виды возмущений | ||
| А0×1(t) | А0× t×1(t) | А0×t2×1(t) | ||
| e3 | n=0 | А0/(1+k) | ¥ | ¥ |
| n=1 | А0/ k | ¥ | ||
| n=2 | 2 А0/ k | |||
| eB | n0=0; np=0 | А0 k 0/(1+ k) | ¥ | ¥ |
| n0=0; np =1 | А0/ kР | ¥ | ||
| n0=1; np =0 | А0 k 0/ k | ¥ | ¥ | |
| n0=1; np =1 | А0/ kР | ¥ | ||
| n0=2; np =2 | 2 А0/ kР |
Выводы:
1. Составляющая ошибки, обусловленная задающим воздействием, зависит от порядка астатизма всей системы
2. Составляющая ошибки, обусловленная возмущающим воздействием, зависит от порядка астатизма регулятора.
3. Ошибка при задающем воздействии определяется по формуле: еЗ=А0×q!/k , где хз= A0×tq×1(t) , q определим при q от 1 до n.
4. Ошибка при возмущающем воздействии обратно пропорциональна коэффициенту системы еВ=1/k.
5. Если q>n, то еЗ(¥)=¥,еВ(¥)=¥.
6. Если q<nР, то еЗ(¥)=0,еВ(¥)=0.
Если система работает на отслеживание ошибки, обусловленное задающим воздействием, то такая система называется системой стабилизации.
Если система работает на отслеживание ошибки, обусловленное возмущающим воздействием, то такая система называется следящей системой.
Чувствительность параметров
Количественной характеристикой чувствительности системы является функция чувствительности, которая определяется как частная производная какой-либо… , расчетное значение данного параметра. Чаще всего на практике применяется относительная функция чувствительности:ЛИТЕРАТУРА
1. В. А. Бессекерский, Е. П. Попов Теория систем автоматического управления.— СПб : Профессия, 2004 .— 749 с.
2. В. А. Лукас Теория управления техническими системами: Учеб. пособие для вузов.— Екатеринбург : Изд-во УГГУ, 2005 .— 676 с.
3. Р. Дорф,Р. Бишоп Современные системы управления: Учеб. для вузов— Изд-во «Лаборатория Базовых Знаний», М.: 2004- 832 с.
4. В. Я. Ротач Теория автоматического управления : Учеб. для вузов— М. : Изд-во МЭИ, 2004 .— 399 с.
– Конец работы –
Используемые теги: Теория, автоматического, управления0.06
Если Вам нужно дополнительный материал на эту тему, или Вы не нашли то, что искали, рекомендуем воспользоваться поиском по нашей базе работ: ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Что будем делать с полученным материалом:
Если этот материал оказался полезным для Вас, Вы можете сохранить его на свою страничку в социальных сетях:
| Твитнуть |
Хотите получать на электронную почту самые свежие новости?

Подпишитесь на Нашу рассылку
Реклама





Информация в виде рефератов, конспектов, лекций, курсовых и дипломных работ имеют своего автора, которому принадлежат права. Поэтому, прежде чем использовать какую либо информацию с этого сайта, убедитесь, что этим Вы не нарушаете чье либо право.
© copyright 1999 - 2024 allRefs.net. Все права защищены. Страница сгенерирована за: 0.146 сек.
Новости и инфо для студентов